







本文参考:https://github.com/drichmond/RISC-V-On-PYNQ
RISC-V On PYNQ
下载依赖包及配置环境
1:下载PYNQ-Z2的镜像:PYNQ-Z2 v2.4 PYNQ image
http://www.pynq.io/board.html?tdsourcetag=s_pcqq_aiomsg
2:烧写镜像到SD卡上,在MobaXterm用SSH方式连接PYNQ-Z2
3:通过命令行下载git工具:
$sudo apt-get update
$sudo apt-get install git
4:下载和安装依赖包:
apt -y install autoconf automake autotools-dev curl libmpc-dev libmpfr-dev libgmp-dev gawk build-essential bison flex texinfo gperf libtool patchutils bc zlib1g-dev git
5:下载两个源存储库:
git clone --recursive https://github.com/riscv/riscv-gnu-toolchain /home/xilinx/riscv-gnu-toolchain
git clone --recursive https://github.com/drichmond/RISC-V-On-PYNQ /home/xilinx/RISC-V-On-PYNQ
生成RISC-V处理器比特流
将RISC-V封装为Vivado IP
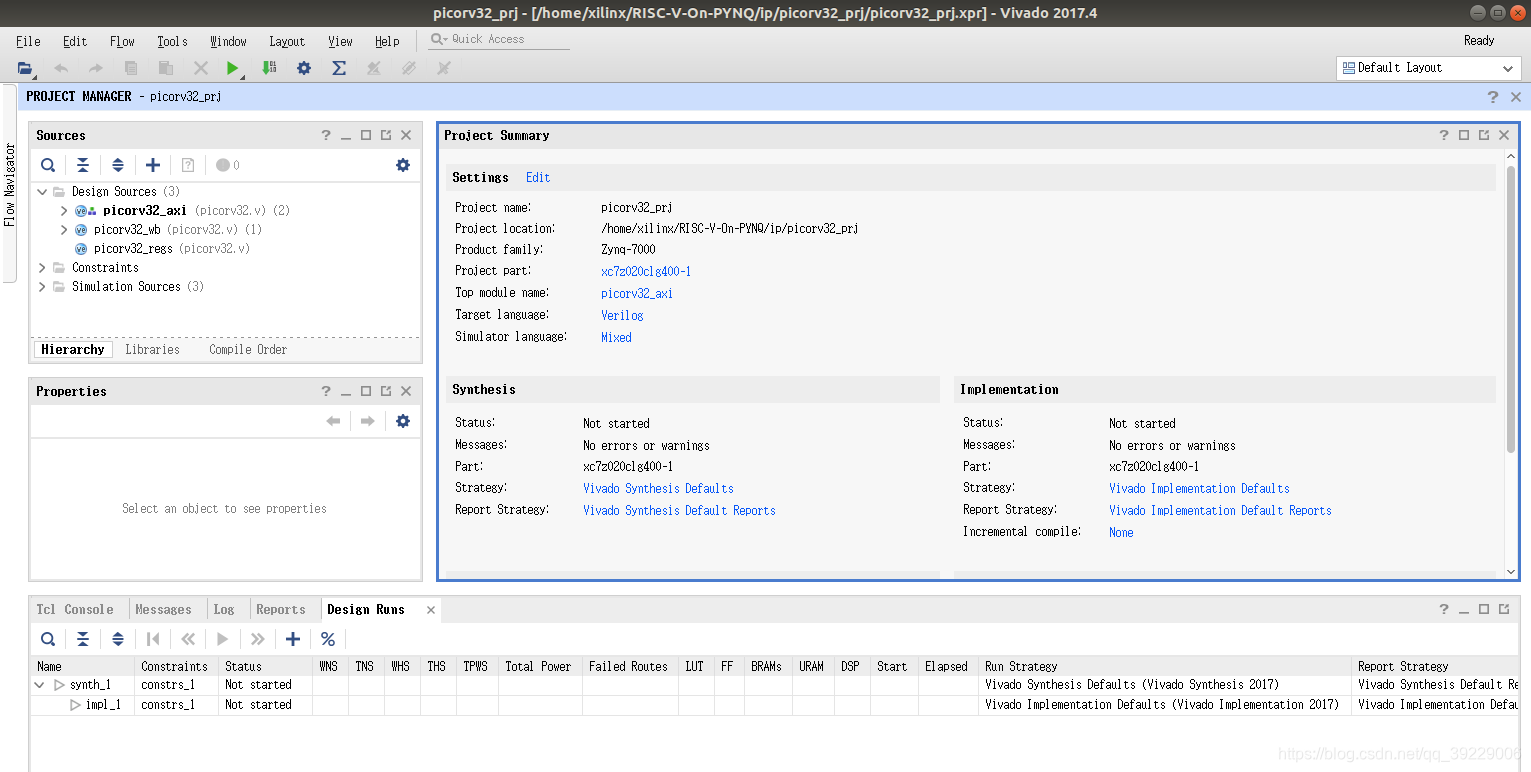
1:使用Vivado 2017.4创建一个工程:
Project name: picorv32_prj
Project location: /home/xilinx/RISC-V-On-PYNQ/ip/
Project Type: RTL Project
Source files: picorv32.v /home/xilinx/RISC-V-On-PYNQ/picorv32
Constraint files: None
parts: xc7z020clg400-1
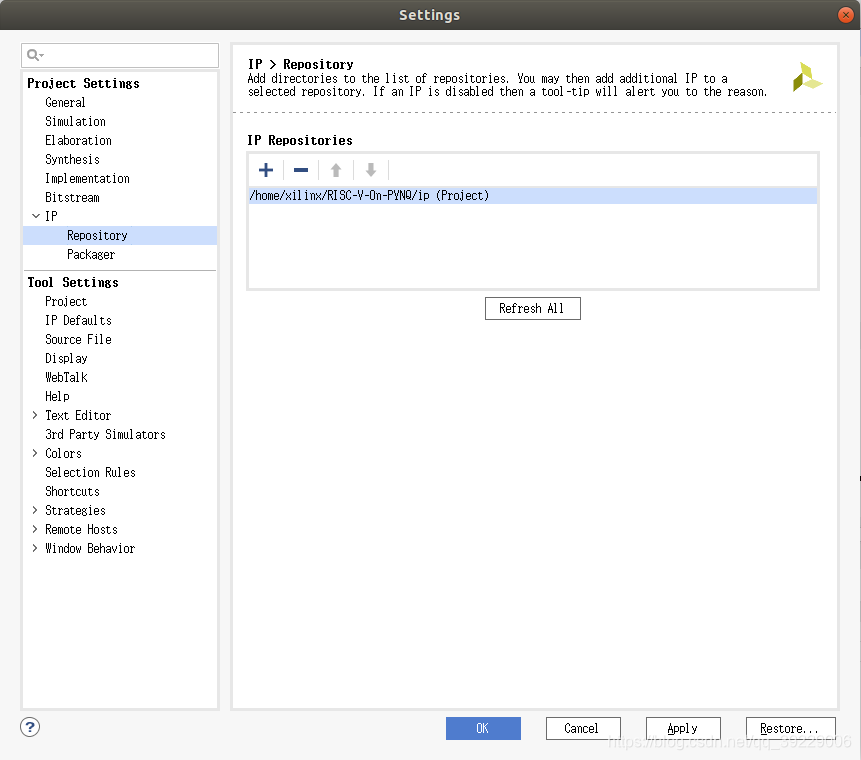
2:将自定义接口IP添加到Vivado工程:
Flow Navigator->PROJECT MANAGER->Settings
3:将picorv32 Vivado项目封装为IP:Tools -> Create and Package New IP…
Packaging Options: Package your current project
IP location: /home/xilinx/RISC-V-On-PYNQ/ip/picorv32_tut
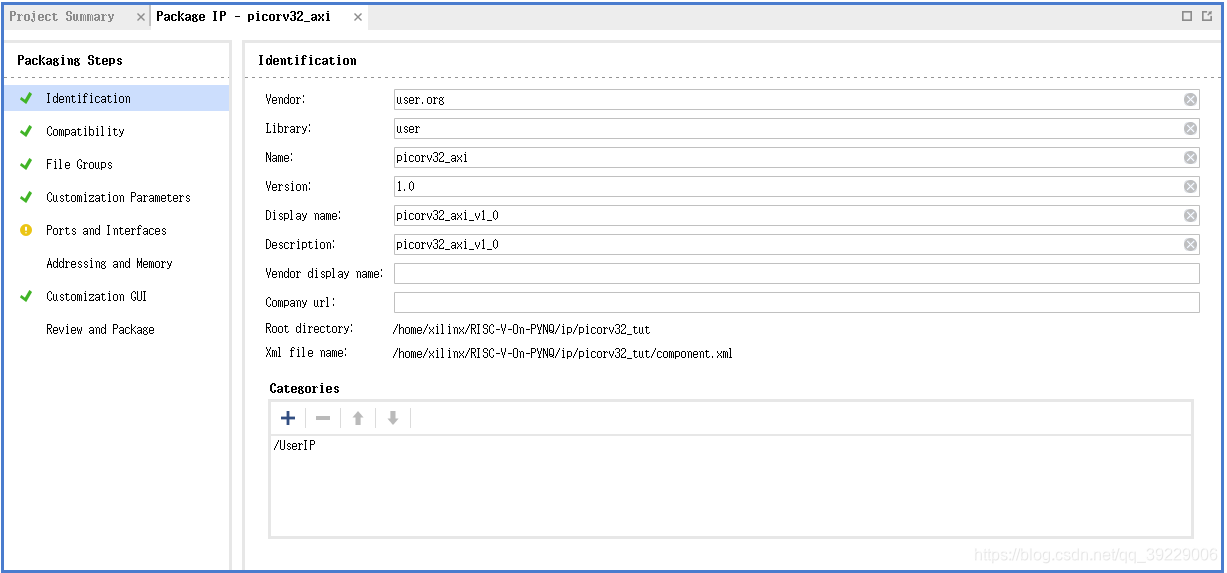
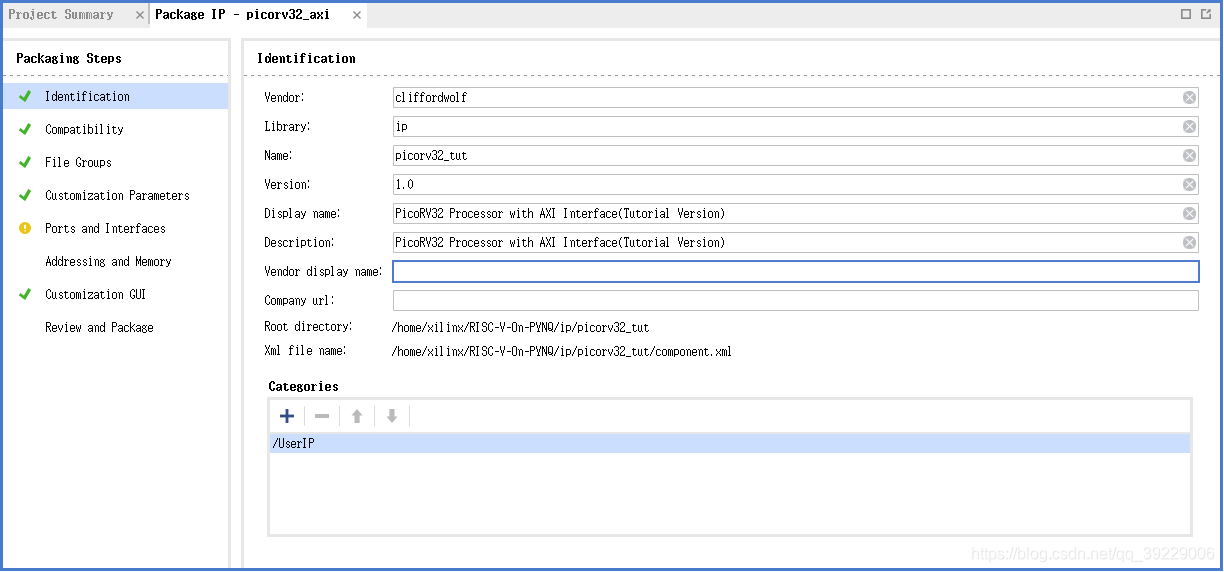
Identification
Vendor: cliffordwolf
Library: ip
Name: picorv32_tut
Display name: PicoRV32 Processor with AXI Interface(Tutorial Version)
Vendor display name: PicoRV32 Processor with AXI Interface(Tutorial Version)
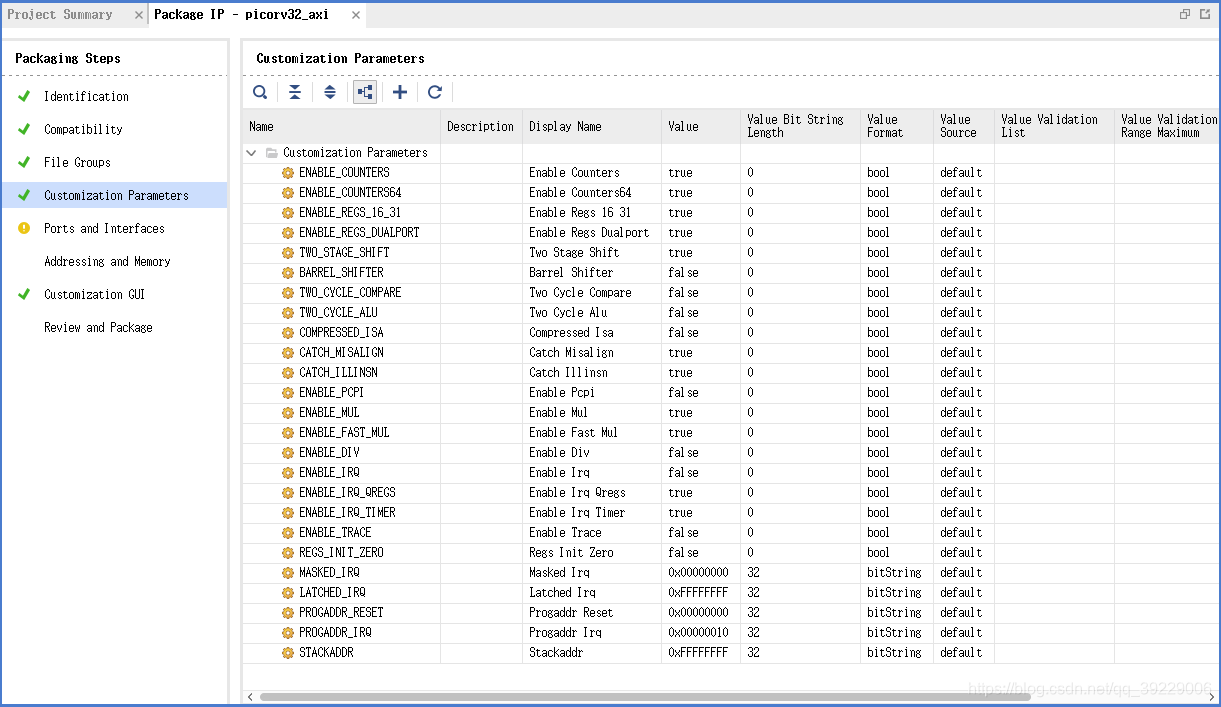
Customization Parameters
所有的参数值的格式都改为:bool
ENABLE_MUL Value: true
ENABLE_FAST_MUL Value: true
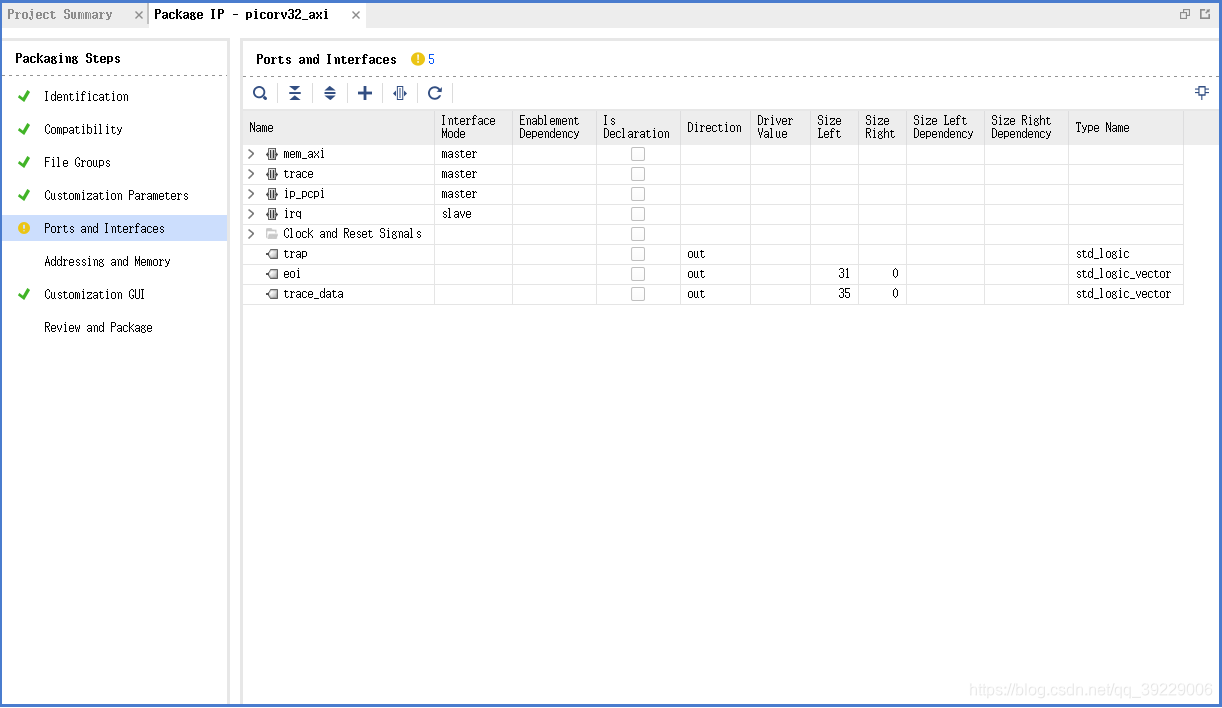
Ports and Interfaces

右键mem_axi->Edit Interface…
General:
Interface Definition: aximm_rtl
Port Mapping:
AWADDR - mem_axi_awaddr
AWPROT - mem_axi_awprot
AWVALID - mem_axi_awvalid
AWREADY - mem_axi_awready
WDATA - mem_axi_wdata
WSTRB - mem_axi_wstrb
WVALID - mem_axi_wvalid
WREADY - mem_axi_wready
BVALID - mem_axi_bvalid
BREADY - mem_axi_bready
ARADDR - mem_axi_araddr
ARPROT - mem_axi_arprot
ARVALID - mem_axi_arvalid
ARREADY - mem_axi_arready
RDATA - mem_axi_rdata
RVALID - mem_axi_rvalid
RREADY - mem_axi_rready
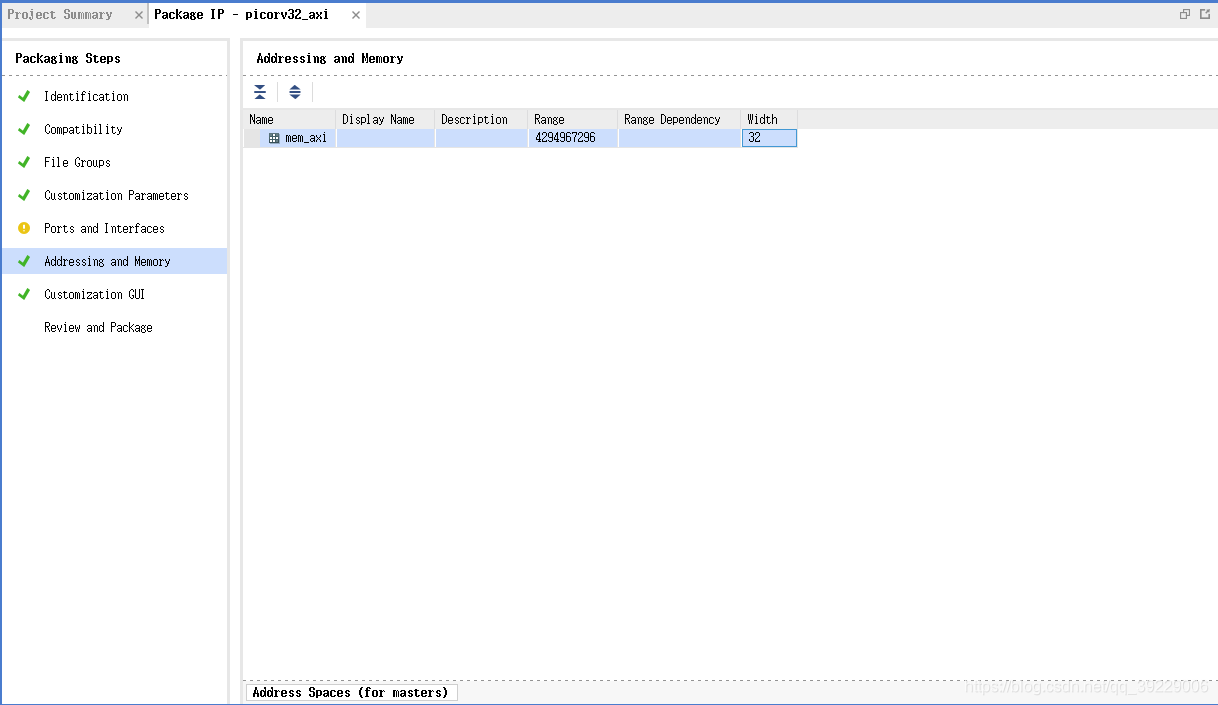
Addressing and Memory
运行Addressing and Memory Map Wizard:
IP Interface: mem_axi
mem_axi Range: 4294967296
mem_axi Width: 32
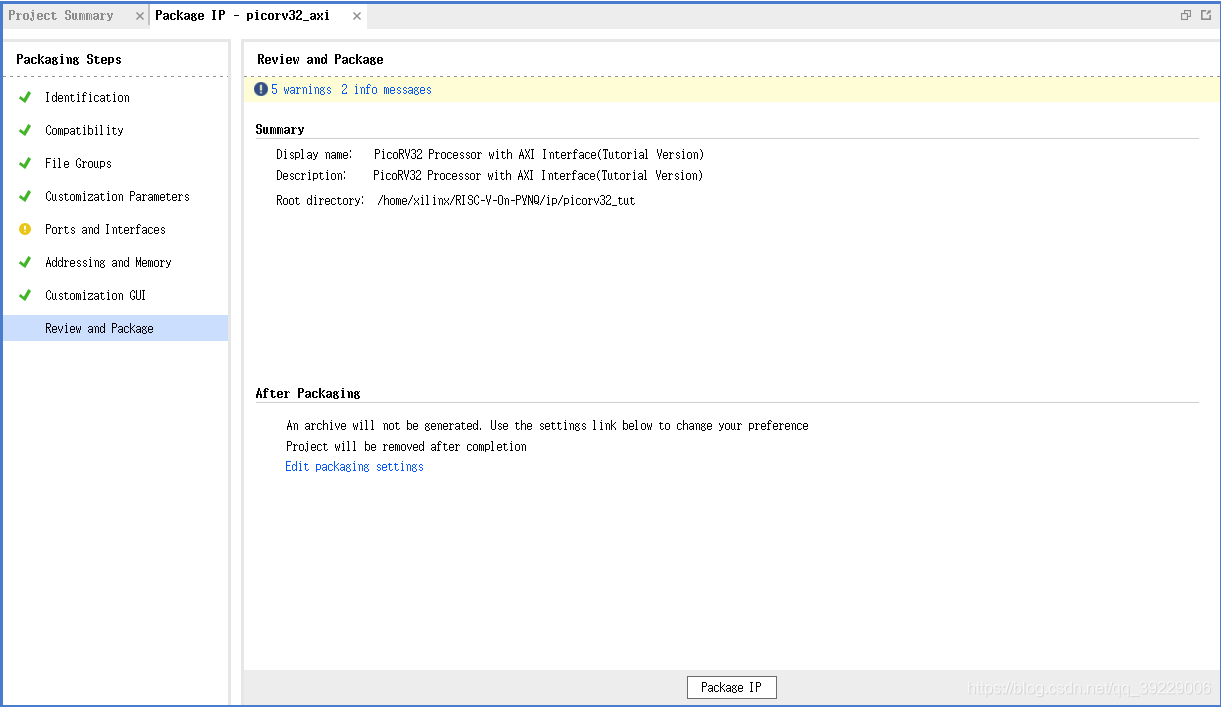
Review and Package
点击Package IP:
为PYNQ-Z2创建RISC-V比特流
将/home/xilinx/RISC-V-On-PYNQ/riscvonpynq/目录下的PYNQ-Z1.xdc文件的72,73行改为如下:
set_property -dict {PACKAGE_PIN P15 IOSTANDARD LVCMOS33} [get_ports arduino_iic_scl_io]
set_property -dict {PACKAGE_PIN P16 IOSTANDARD LVCMOS33} [get_ports arduino_iic_sda_io]
执行以下命令:
make -C /home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut/ synth
vivado tutorial/tutorial.xpr
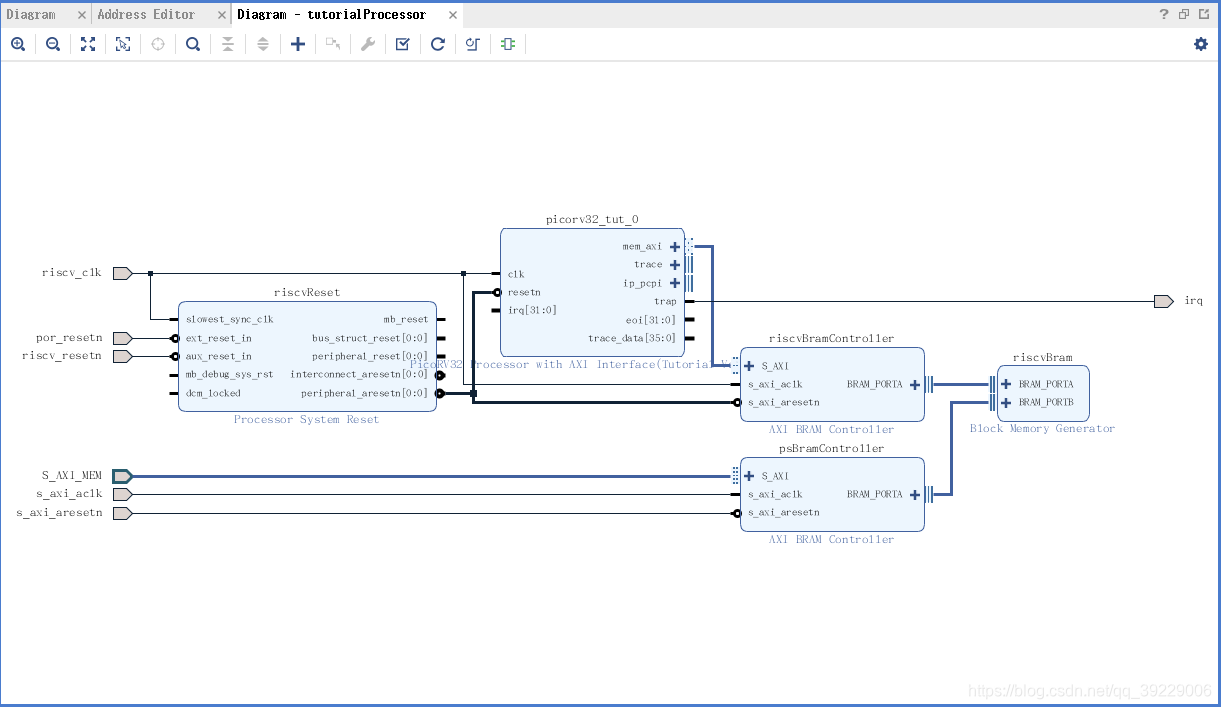
4:打开tutorial.bd文件
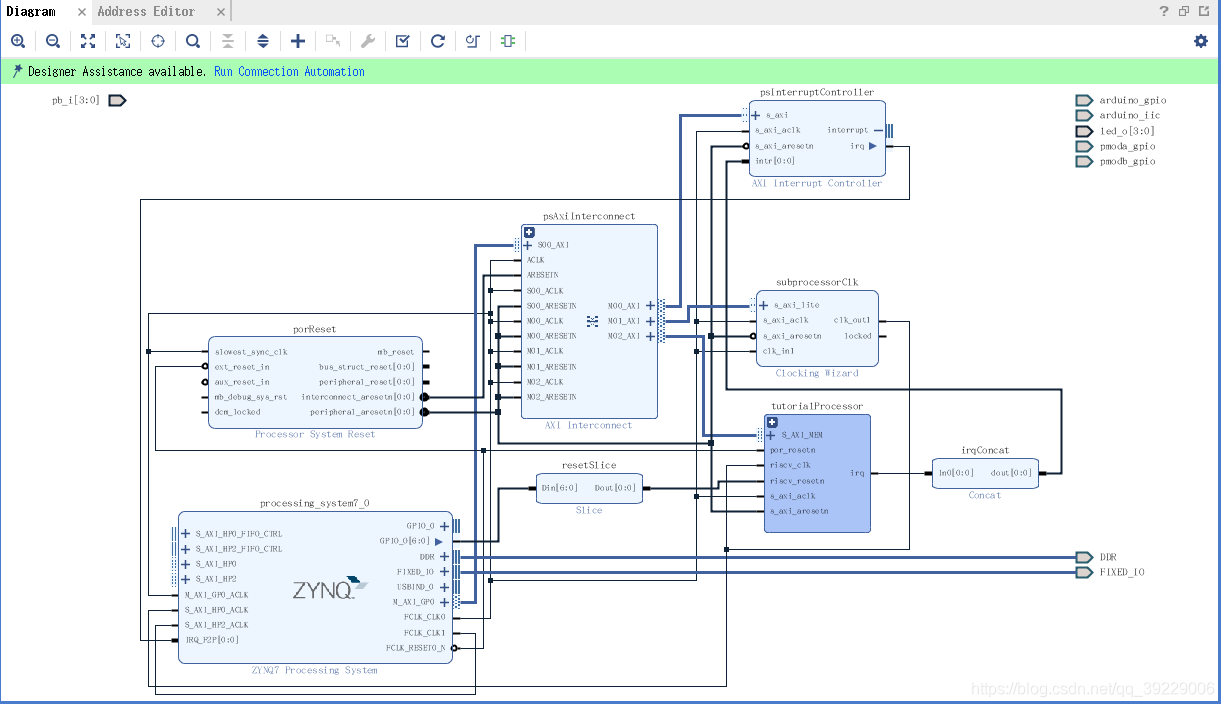
双击tutorialProcessor: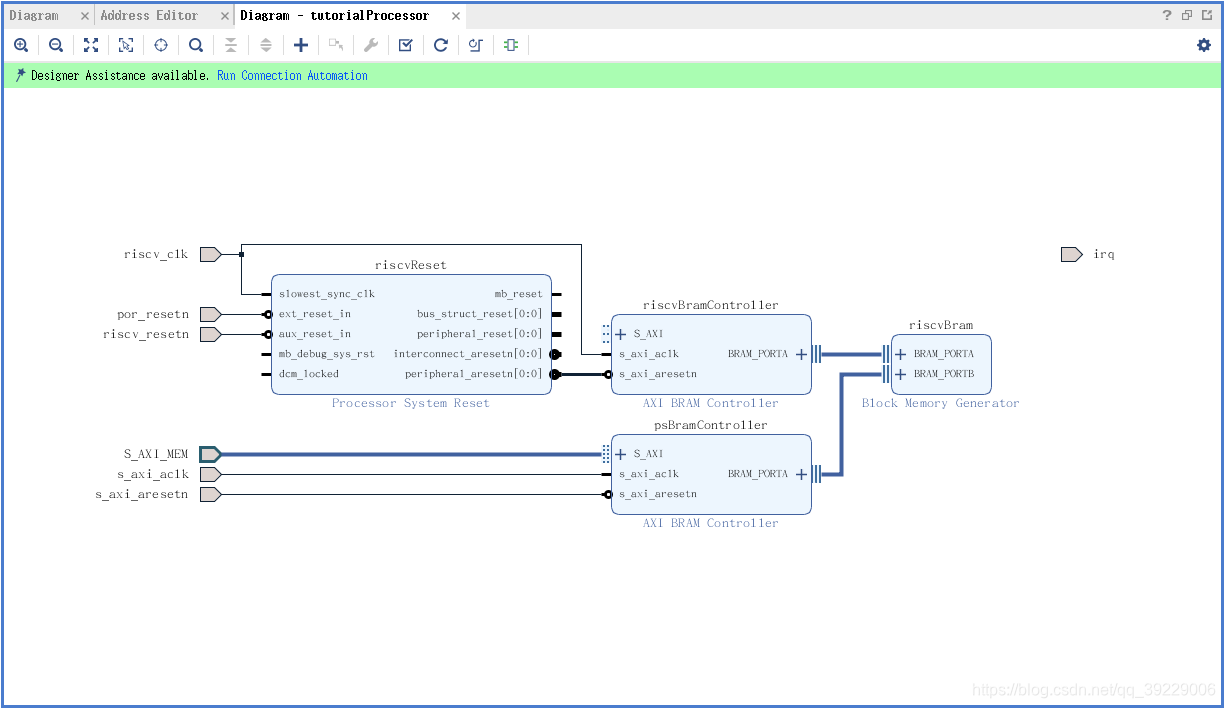
点击 + 号,将 PicoRV32 Processor with AXI Interface (Tutorial Version) IP添加进去:
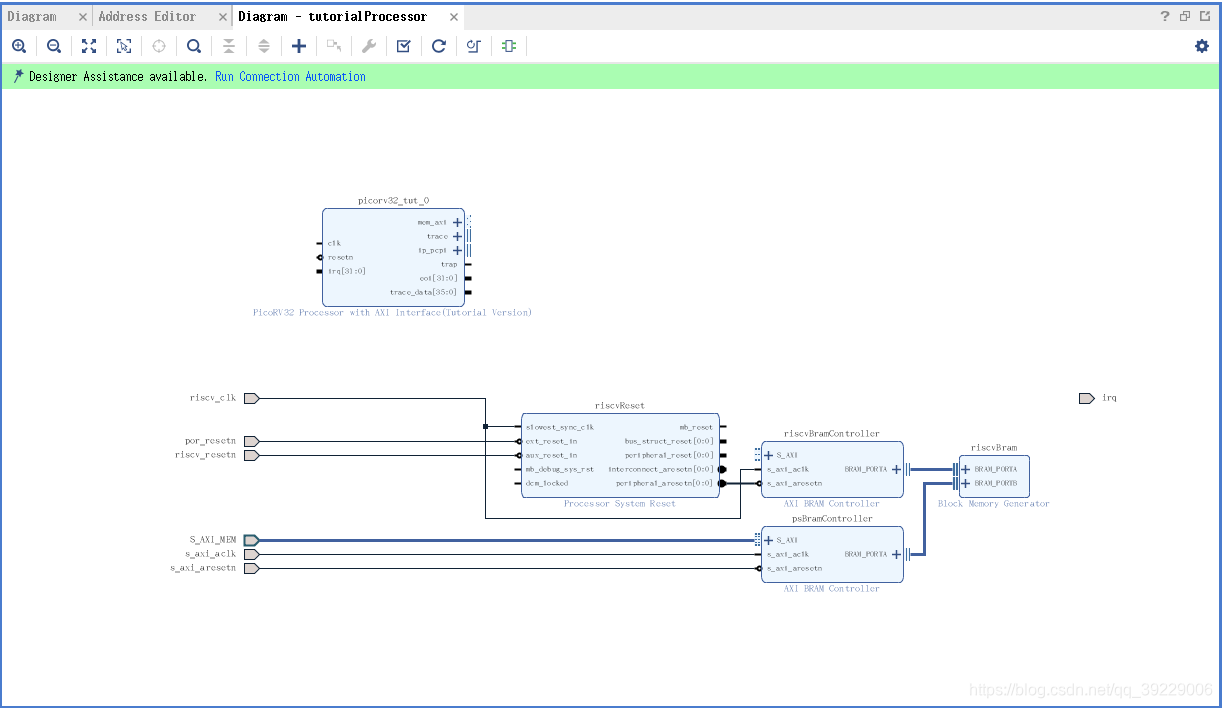
并按下图连线:
5:进入Address Editor窗口,分配地址映射:
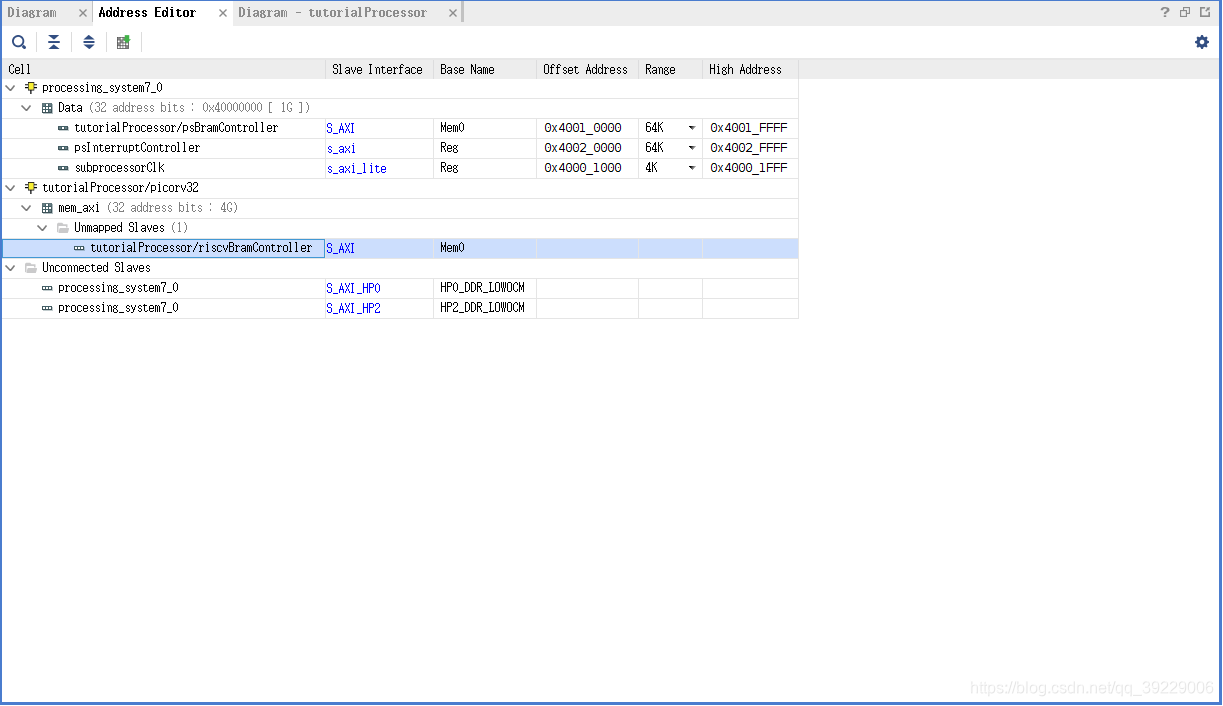
右击tutorialProcessor/riscvBramController->Assign Address
Offset Address: 0x0000_0000
High Address: 0x0000_FFFF
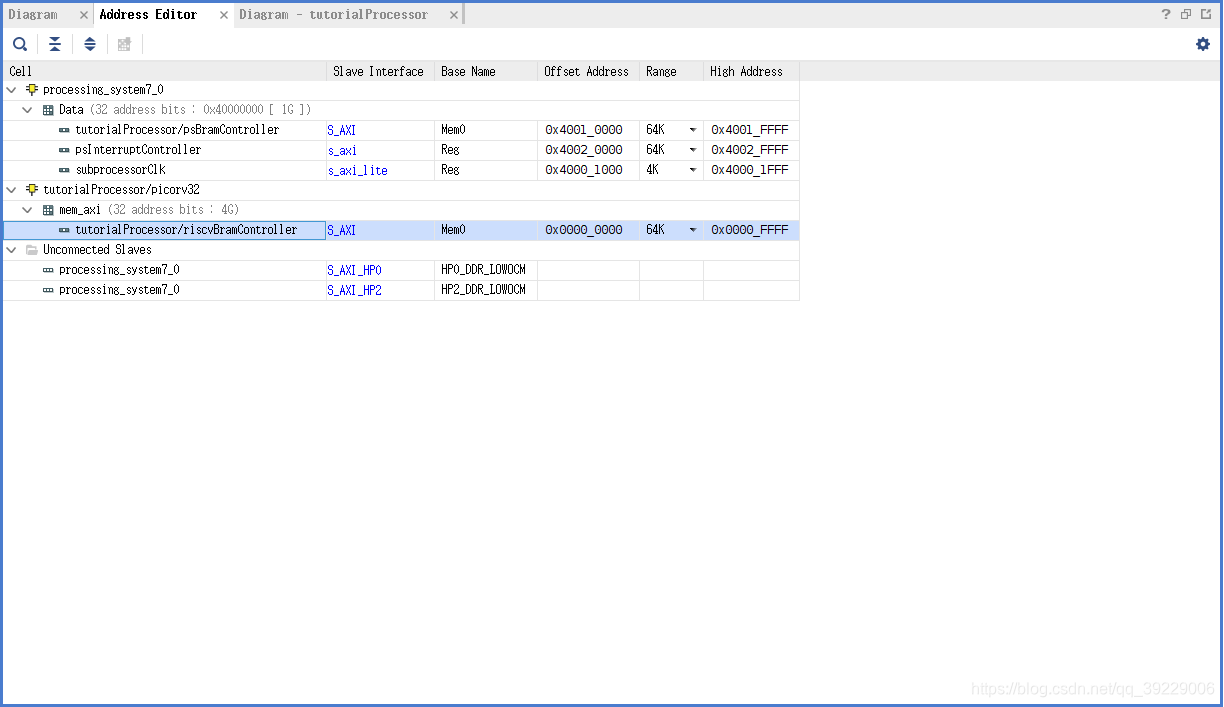
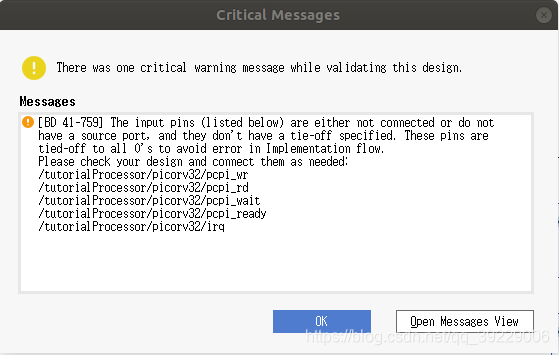
运行Tools->Validate Design:
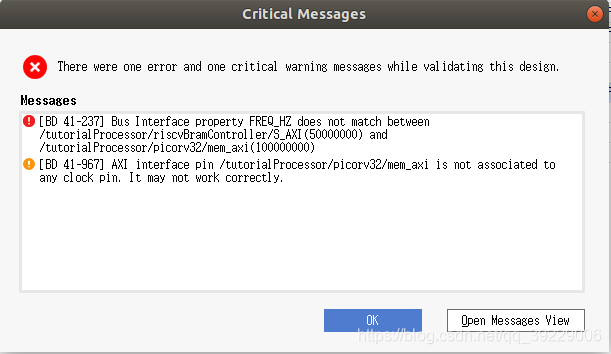
将mem_axi频率改为50000000,再次运行:
6:生成比特流,点击Generate Bitstream,最后在/tut/tutorial/tutorial.runs/impl_1目录下生成一个tutorial_wrapper.bit文件,将该文件移动到tut目录下,并改名为tutorial.bit.
7:将设计导出到tcl文件中并覆盖之前的tcl文件,File->Exports…->Export Block Design,确保Automatically create top design没有被勾选
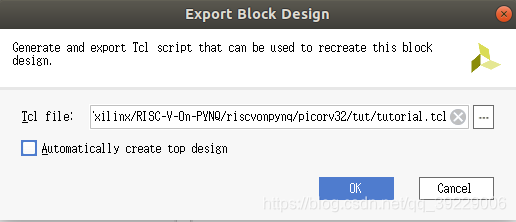
8:将上述tutorial.bit和tutorial.tcl文件通过SSH放到PYNQ-Z2的home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut目录下
在PYNQ-Z2上编译RISC-V GCC工具链
1:通过MobaXterm以SSH方式连接PYNQ-Z2,在终端/home/xilinx/riscv-gnu-toolchain/目录下依次执行以下命令进行编译:
./configure --prefix=/opt/riscv32im --with-arch=rv32im
make
最后在/opt目录下生成riscv32im文件夹
2:将生成的/opt/riscv32im/bin配置到环境变量中,在Jupyter Notebooks中执行以下代码:
import os
path = os.environ['PATH'].split()
riscv_path = '/opt/riscv32im/bin'
if(riscv_path not in path):
print('Updating /etc/environment file... ',end="")
!sed -i 's/PATH=\"\(.*\)\"/PATH=\"\/opt\/riscv32im\/bin:\1\"/' /etc/environment
print('done')
else:
print("/etc/environment file already updated")
显示 Updating /etc/environment file… done 即配置完成
3:重启PYNQ-Z2:
!shutdown -r now
4:重启后确认RISC-V工具链已经成功安装:
!riscv32-unknown-elf-gcc --version
显示 riscv32-unknown-elf-gcc 版本号即已成功安装。
封装成一个Overlay
1、在home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut/文件夹下新建tutorial.py文件,文件内容如下:
from pynq import Overlay, GPIO, Register
import os
import inspect
from riscvonpynq.Processor import BramProcessor
#--------
class TutorialOverlay(Overlay):
"""Overlay driver for the PicoRV32 bram Overlay
Note
----
This class definition must be co-located with the .tcl and .bit
file for the overlay for the search path modifications in
riscvonpynq.Overlay to work. __init__ in riscvonpynq.Overlay uses
the path of this file to search for the .bit file using the
inspect package.
"""
pass
class TutorialProcessor(BramProcessor):
"""Hierarchy driver for the PicoRV32 BRAM Processor
Note
----
In order to be recognized as a RISC-V Processor hierarchy, three
conditions must be met: First, there must be a PS-Memory-Mapped
Block RAM Controller where the name matches the variable
_bram. Second, the hierarchy name (fullpath) must equal the
variable _name. Finally, there must be a GPIO port with the name
_reset_name.
Subclasses of this module are responsible for setting _name (The
name of the Hierarchy), _bits (Processor bit-width), _proc
(Processor Type Name)
This class must be placed in a known location relative to the
build files for this processor. The relative path can be modified
in __get_path.
"""
_name = 'tutorialProcessor'
_proc = 'picorv32'
_bits = 32
@classmethod
def checkhierarchy(cls, description):
return super().checkhierarchy(description)
def __get_path(self):
"""Get the directory path of this file, or the directory path of the
class that inherits from this class.
"""
# Get file path of the current class (i.e. /opt/python3.6/<...>/stream.py)
file_path = os.path.abspath(inspect.getfile(inspect.getmodule(self)))
# Get directory path of the current class (i.e. /opt/python3.6/<...>/stream/)
return os.path.dirname(file_path)
def __init__(self, description, *args):
"""Return a new Processor object.
Parameters
----------
description : dict
Dictionary describing this processor.
"""
build_path = os.path.join(self.__get_path(), "build")
reset_value = 0
super().__init__(build_path, reset_value, description, *args)
2、在/home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut/创建 __init__.py文件,文件内容如下:
from . import tutorial
from . import build
3、将../bram/build拷贝到../tut/build中,具体jupyter命令如下
!cp /home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/bram/build/ /home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut/build
4、在jupyter中执行以下代码
import os
os.chdir("/home/xilinx/RISC-V-On-PYNQ/")
print(os.getcwd())
即设置当前工作路径为/home/xilinx/RISC-V-On-PYNQ。接着继续执行以下代码:
import sys
sys.path.insert(0, '/home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/')
from tut.tutorial import TutorialOverlay
overlay = TutorialOverlay("/home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut/tutorial.bit")
没有报错后继续执行以下代码,进行移植的测试
%%riscvc test overlay.tutorialProcessor
int main(int argc, char ** argv){
unsigned int * arr = (unsigned int *)argv[1];
return arr[2];
}
执行结果如下:

表示编译成功,被编译的是test.c文件,若此步骤出现问题,请检查riscv32-unknown-elf-gcc命令是否能够正确执行、/home/xilinx/RISC-V-On-PYNQ/ip/路径下的picorv32_axi是否存在。
5、接着运行编译出来的文件:在jupyter执行以下代码
import numpy as np
arg1 = np.array([4,2,3], np.uint32)
retval = overlay.tutorialProcessor.run(test, arg1)
if(retval != arg1[2]):
print("Test failed!")
else:
print("Test passed!")
测试成功后将会看到输出如下:

若出现如下错误信息:
‘Unaligned write: data length must be multiple of 4.’
可将/usr/local/lib/python3.6/dist-packages/pynq/下的mmio.py文件的代码替换如下:
# Copyright (c) 2016, Xilinx, Inc.
# All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
#
# 1. Redistributions of source code must retain the above copyright notice,
# this list of conditions and the following disclaimer.
#
# 2. Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in the
# documentation and/or other materials provided with the distribution.
#
# 3. Neither the name of the copyright holder nor the names of its
# contributors may be used to endorse or promote products derived from
# this software without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
# AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
# THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
# PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR
# CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
# EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
# PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
# OR BUSINESS INTERRUPTION). HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
# WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
# OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF
# ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
import os
import mmap
import numpy as np
__author__ = "Yun Rock Qu"
__copyright__ = "Copyright 2016, Xilinx"
__email__ = "pynq_support@xilinx.com"
#add this function below
def modify_size(length):
while(length%4):
length=length+1
return length
class MMIO:
""" This class exposes API for MMIO read and write.
Attributes
----------
virt_base : int
The address of the page for the MMIO base address.
virt_offset : int
The offset of the MMIO base address from the virt_base.
base_addr : int
The base address, not necessarily page aligned.
length : int
The length in bytes of the address range.
debug : bool
Turn on debug mode if it is True.
mmap_file : file
Underlying file object for MMIO mapping
mem : mmap
An mmap object created when mapping files to memory.
array : numpy.ndarray
A numpy view of the mapped range for efficient assignment
"""
def __init__(self, base_addr, length=4, debug=False):
"""Return a new MMIO object.
Parameters
----------
base_addr : int
The base address of the MMIO.
length : int
The length in bytes; default is 4.
debug : bool
Turn on debug mode if it is True; default is False.
"""
if base_addr < 0 or length < 0:
raise ValueError("Base address or length cannot be negative.")
euid = os.geteuid()
if euid != 0:
raise EnvironmentError('Root permissions required.')
# Align the base address with the pages
self.virt_base = base_addr & ~(mmap.PAGESIZE - 1)
# Calculate base address offset w.r.t the base address
self.virt_offset = base_addr - self.virt_base
# Storing the base address and length
self.base_addr = base_addr
self.length = length
self.debug = debug
self._debug('MMIO(address, size) = ({0:x}, {1:x} bytes).',
self.base_addr, self.length)
# Open file and mmap
self.mmap_file = os.open('/dev/mem',
os.O_RDWR | os.O_SYNC)
self.mem = mmap.mmap(self.mmap_file, self.length + self.virt_offset,
mmap.MAP_SHARED,
mmap.PROT_READ | mmap.PROT_WRITE,
offset=self.virt_base)
self.array = np.frombuffer(self.mem, np.uint32,
length >> 2, self.virt_offset)
def __del__(self):
"""Destructor to ensure mmap file is closed
"""
os.close(self.mmap_file)
def read(self, offset=0, length=4):
"""The method to read data from MMIO.
Parameters
----------
offset : int
The read offset from the MMIO base address.
length : int
The length of the data in bytes.
Returns
-------
list
A list of data read out from MMIO
"""
if length != 4:
raise ValueError("MMIO currently only supports 4-byte reads.")
if offset < 0:
raise ValueError("Offset cannot be negative.")
idx = offset >> 2
if offset % 4:
raise MemoryError('Unaligned read: offset must be multiple of 4.')
self._debug('Reading {0} bytes from offset {1:x}',
length, offset)
# Read data out
return int(self.array[idx])
def write(self, offset, data):
"""The method to write data to MMIO.
Parameters
----------
offset : int
The write offset from the MMIO base address.
data : int / bytes
The integer(s) to be written into MMIO.
Returns
-------
None
"""
if offset < 0:
raise ValueError("Offset cannot be negative.")
idx = offset >> 2
if offset % 4:
raise MemoryError('Unaligned write: offset must be multiple of 4.')
if type(data) is int:
self._debug('Writing 4 bytes to offset {0:x}: {1:x}',
offset, data)
self.array[idx] = np.uint32(data)
elif type(data) is bytes:
length = len(data)
num_words = length >> 2
length=modify_size(length)
if length % 4:
raise MemoryError(
'Unaligned write: data length must be multiple of 4.')
buf = np.frombuffer(data, np.uint32, num_words, 0)
for i in range(len(buf)):
self.array[idx + i] = buf[i]
else:
raise ValueError("Data type must be int or bytes.")
def _debug(self, s, *args):
"""The method provides debug capabilities for this class.
Parameters
----------
s : str
The debug information format string
*args : any
The arguments to be formatted
Returns
-------
None
"""
if self.debug:
print('MMIO Debug: {}'.format(s.format(*args)))
6、测试成功后,为了安装资源到板子上,需运行下面的代码:
!pip3.6 install --upgrade /home/xilinx/RISC-V-On-PYNQ/
成功后出现如下信息:

成功安装资源后便可直接进行移植、编译、运行而不用修改系统变量了。
最后在/home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/下的 __init__.py修改如下:
# ----------------------------------------------------------------------
# Copyright (c) 2018, The Regents of the University of California All
# rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are
# met:
#
# * Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
#
# * Redistributions in binary form must reproduce the above
# copyright notice, this list of conditions and the following
# disclaimer in the documentation and/or other materials provided
# with the distribution.
#
# * Neither the name of The Regents of the University of California
# nor the names of its contributors may be used to endorse or
# promote products derived from this software without specific
# prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
# A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL REGENTS OF THE
# UNIVERSITY OF CALIFORNIA BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
# ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR
# TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE
# USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH
# DAMAGE.
# ----------------------------------------------------------------------
from . import axi
from . import bram
from . import tut
即可直接运行以下代码:
from riscvonpynq.picorv32.tut.tutorial import TutorialOverlay
overlay = TutorialOverlay("/home/xilinx/RISC-V-On-PYNQ/riscvonpynq/picorv32/tut/tutorial.bit")
%%riscvc test overlay.tutorialProcessor
int main(int argc, char ** argv){
unsigned int * arr = (unsigned int *)argv[1];
return arr[2];
}
import numpy as np
arg1 = np.array([4,2,3], np.uint32)
retval = overlay.tutorialProcessor.run(test, arg1)
if(retval != arg1[2]):
print("Test failed!")
else:
print("Test passed!")
到此RISC-V在PYNQ-Z2的移植结束。

















 1479
1479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









