






你喜欢旅行吗?
如果是的话,当你发现自己在一个语言不通的环境中,第一反应往往是掏出手机,试图查找那陌生词汇的中文意思,这无疑是个实用的方法。
但如果整段文字都是陌生语言的话怎么办呢?这时候图片翻译工具就派上用场了。
本文将介绍5个图片翻译软件在线翻译工具,让你在碰到当地语言不通时,可以快速翻译菜单或路标。

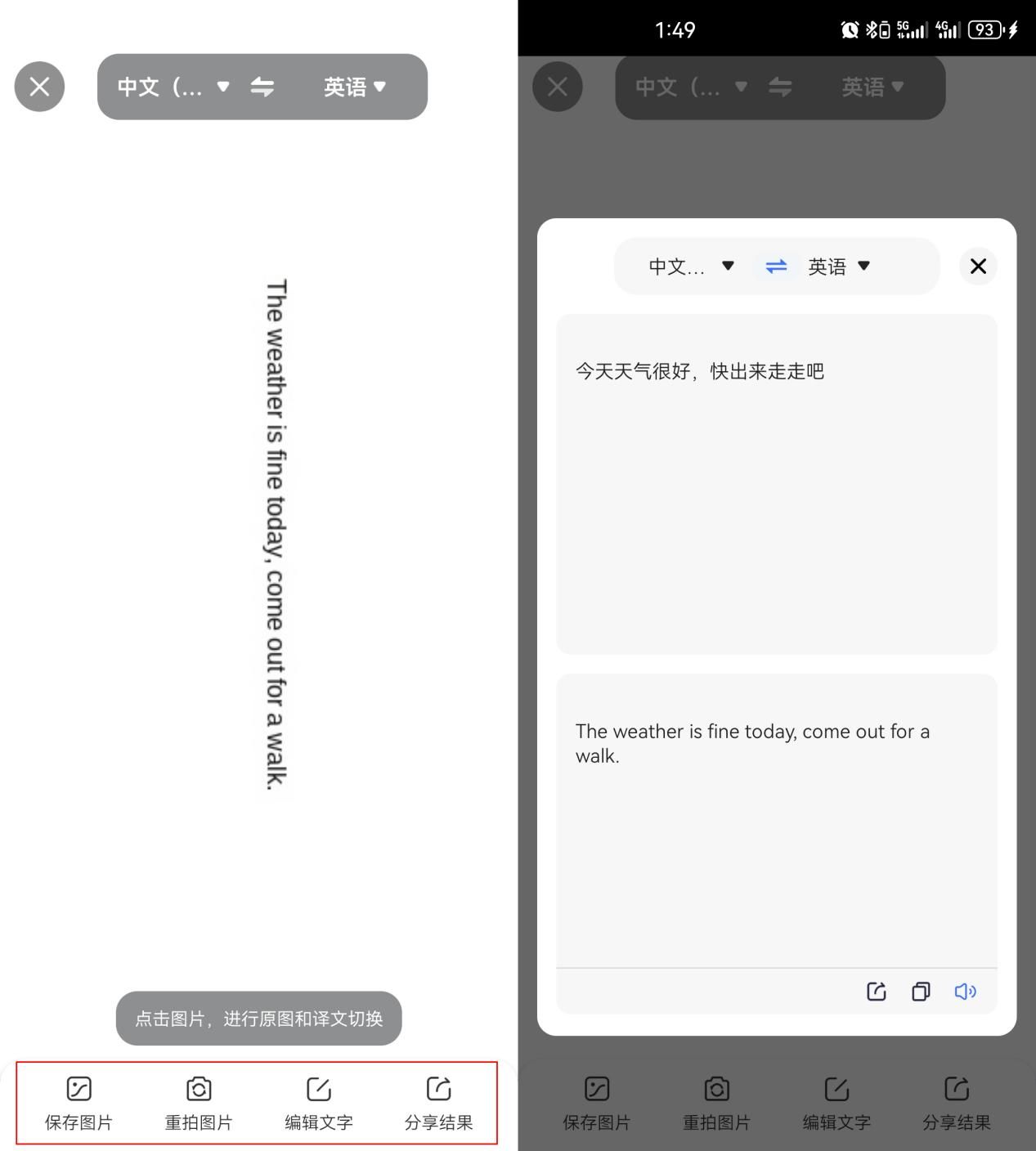
#01.翻译相机
〖功能特点〗
1.无需支付费用,大家即可享受便捷的翻译服务
2.通过拍照/上传图片即可快速识别并翻译图片中的文字
3.覆盖全球主要语种,满足不同小可爱的翻译需求
〖使用界面〗
•简洁直观:操作界面友好,大家可以轻松上手
•易于导航:清晰的导航帮助大家快速找到所需功能
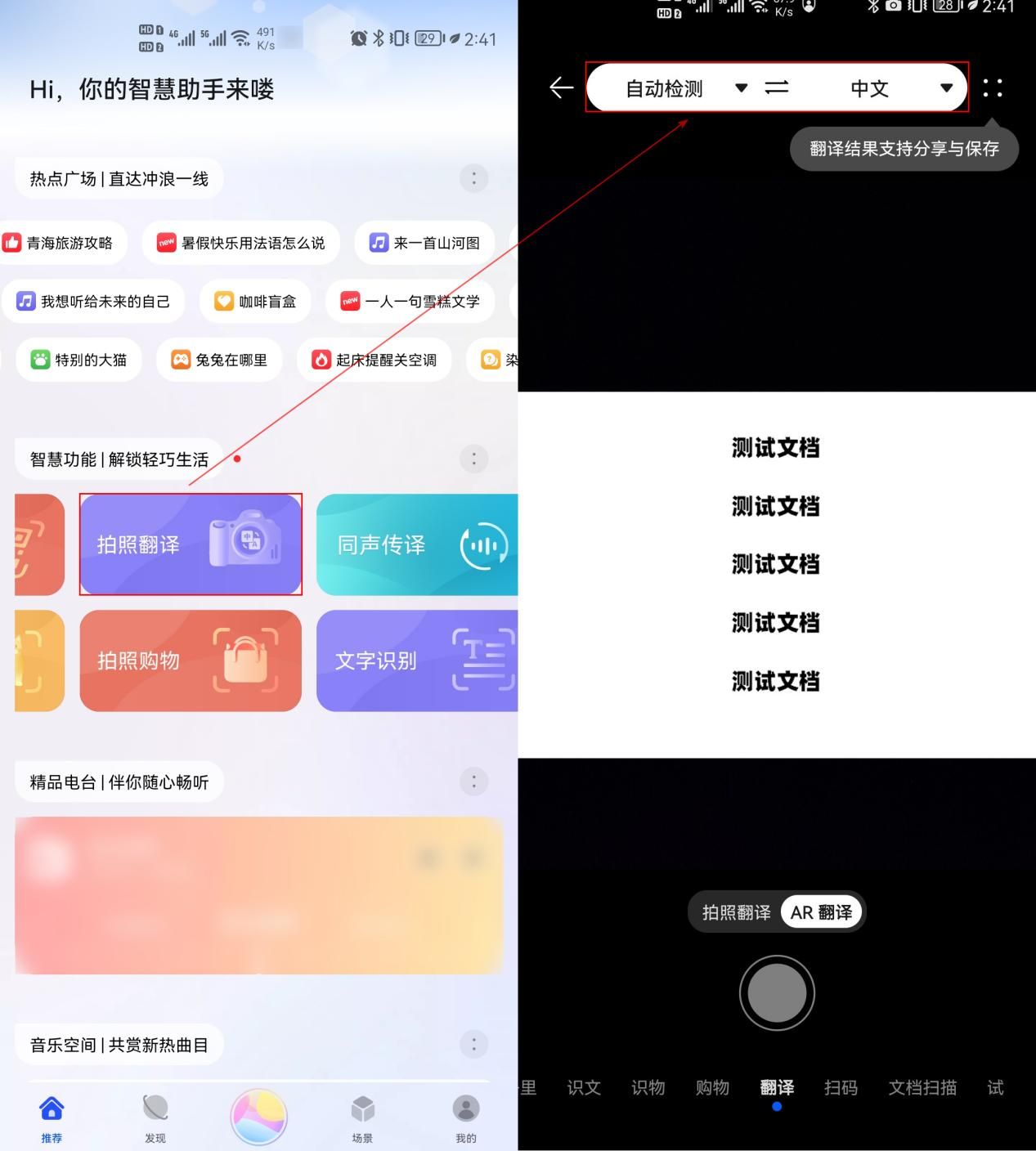
#02.智慧助手
〖功能特点〗
1.根据大家的使用习惯提供定制化的翻译服务
2.支持拍照翻译、语音翻译和实时对话翻译等多种翻译模式。
〖使用界面〗
•界面友好:提供流畅的使用体验,简化操作流程
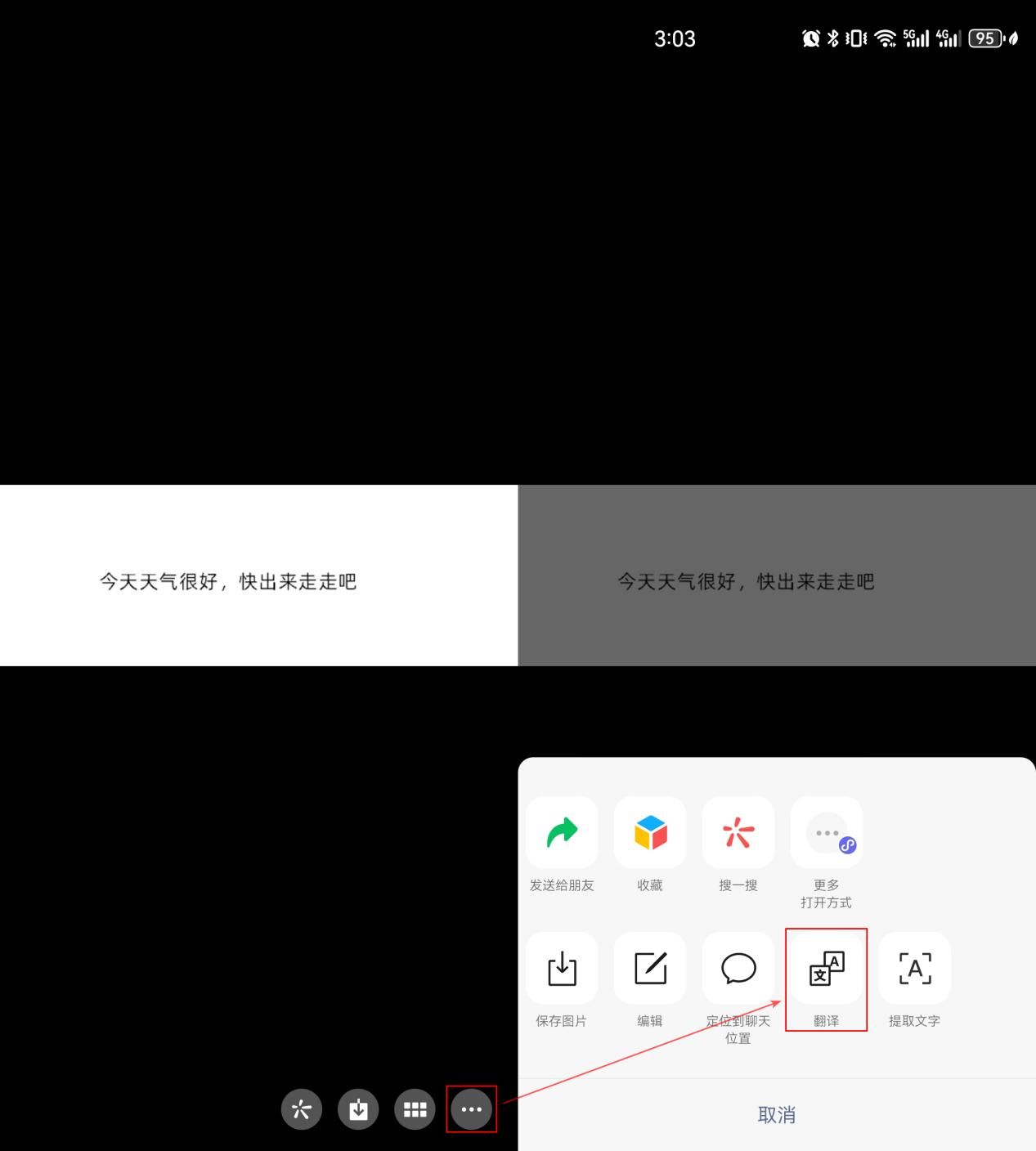
#03.微信
〖功能特点〗
1.在社交应用中集成翻译功能,方便快捷
2.支持多种语言的翻译服务,满足不同小伙伴的需求
〖使用界面〗
•即时分享:翻译结果可即时分享至聊天窗口
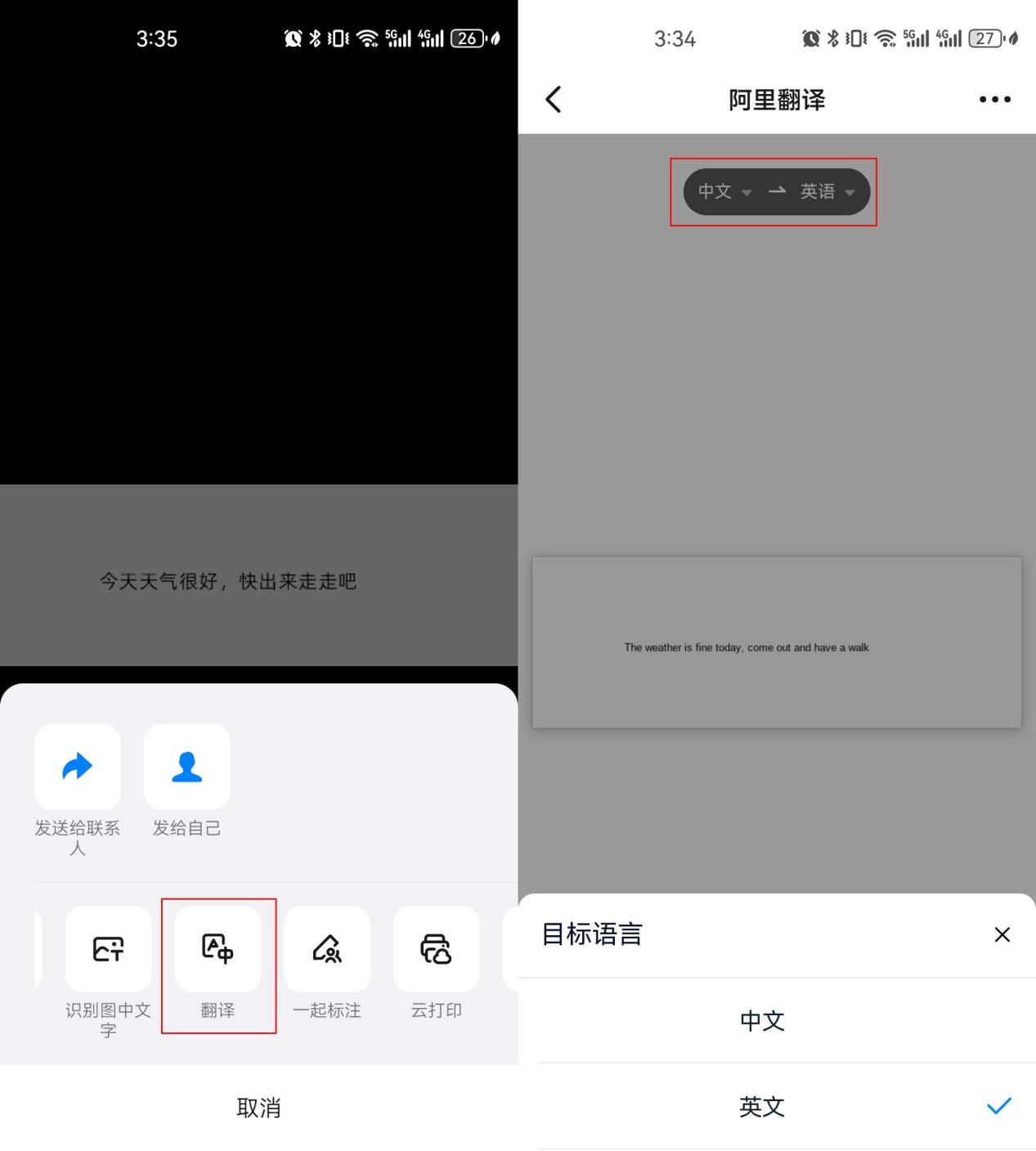
#04.钉钉
〖功能特点〗
1.专为商务办公环境设计,提高工作效率
2.支持团队成员间的多语言沟通和协作
〖使用界面〗
•功能集成:翻译功能与其它办公工具集成,便于团队协作
#05.WPS
〖功能特点〗
1.作为办公软件的一部分,方便文档处理和翻译
2.支持多种图片格式的翻译
〖使用界面〗
•直观操作:界面直观,大家可以快速进行图片翻译
•兼容性强:与多种操作系统和设备兼容,使用灵活

★除了必备的工具外,旅行时,掌握一些基本的英语句子表达会非常有帮助的。以下是一些旅行中可能会用到的必备句子,快学起来~
⑴问路:
请问,洗手间在哪里?- Excuse me, where is the restroom?
我迷路了,你能帮我吗?- I'm lost. Can you help me?
⑵交通:
我需要一张去市中心的票。 - I need a ticket to the city center.
请问,最近的地铁站在哪里? - Where is the nearest subway station?
⑶餐饮:
请给我菜单。 - Could I have the menu, please?
⑷购物:
我能用信用卡支付吗? - Can I pay with a credit card?
⑸住宿:
我想预订一间双人房。 - I'd like to book a double room.
我的房间能退房吗? - Can I check out of my room?

在旅途中,语言的障碍不再是难题。这些图片翻译软件在线翻译工具,让我们只需轻触屏幕,便能轻松跨越语言的界限,享受无障碍的旅行体验。















 333
333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









