



1.强化学习与监督学习的区别
(1)强化学习输入的样本是序列数据,而不像监督学习里面样本都是独立分布的。
(2)学习器并没有告诉我们每一步正确的动作应该是什么,学习器需要自己去发现哪些动作可以带来 最多的奖励,只能通过不停地尝试来发现最有利的动作。
(3)智能体获得自己能力的过程,其实是不断地试错探索(trial-and-error exploration)的过程。探索 (exploration)和利用(exploitation)是强化学习里面非常核心的问题。其中,探索指尝试一些新的动作, 这些新的动作有可能会使我们得到更多的奖励,也有可能使我们“一无所有”;利用指采取已知的可以获得最多奖励的动作,重复执行这个动作,因为我们知道这样做可以获得一定的奖励。因此,我们需要在探索和利用之间进行权衡,这也是在监督学习里面没有的情况。
(4)在强化学习过程中,没有非常强的监督者(supervisor),只有奖励信号(reward signal),并且奖励信号是延迟的,即环境会在很久以后告诉我们之前我们采取的动作到底是不是有效的。因为我们没有得 到即时反馈,所以智能体使用强化学习来学习就非常困难。当我们采取一个动作后,如果我们使用监督学习,我们就可以立刻获得一个指导,比如,我们现在采取了一个错误的动作,正确的动作应该是什么。而在强化学习里面,环境可能会告诉我们这个动作是错误的,但是它并没有告诉我们正确的动作是什么。而且更困难的是,它可能是在一两分钟过后告诉我们这个动作是错误的。所以这也是强化学习和监督学习不同的地方。
2.通过与监督学习比较,我们可以总结出强化学习的一些特征。
(1)强化学习会试错探索,它通过探索环境来获取对环境的理解。
(2)强化学习智能体会从环境里面获得延迟的奖励。
(3)在强化学习的训练过程中,时间非常重要。因为我们得到的是有时间关联的数据(sequential data), 而不是独立同分布的数据。在机器学习中,如果观测数据有非常强的关联,会使得训练非常不稳定。这也是为什么在监督学习中,我们希望数据尽量满足独立同分布,这样就可以消除数据之间的相关性。
(4)智能体的动作会影响它随后得到的数据,这一点是非常重要的。在训练智能体的过程中,很多时 候我们也是通过正在学习的智能体与环境交互来得到数据的。所以如果在训练过程中,智能体不能保持稳定,就会使我们采集到的数据非常糟糕。我们通过数据来训练智能体,如果数据有问题,整个训练过程就会失败。所以在强化学习里面一个非常重要的问题就是,怎么让智能体的动作一直稳定地提升。
3. 如何理解随机性策略和确定性策略

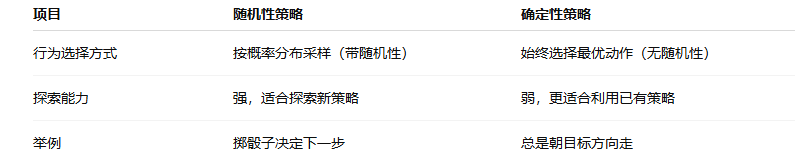
随机性策略是基于当前状态输出概率,选择概率最大的动作输出;
确定性策略 是基于当前状态直接输出确定的动作。
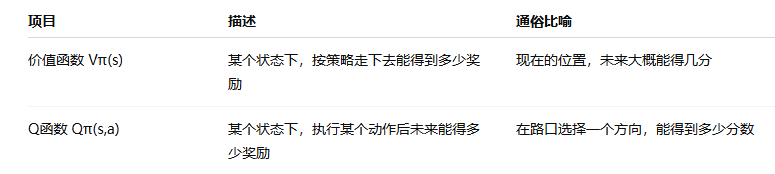
4.价值函数和Q值函数
价值函数是根据当前状态评估未来奖励
Q值函数比价值函数更细,考虑的是当前状态、动作来评估未来奖励
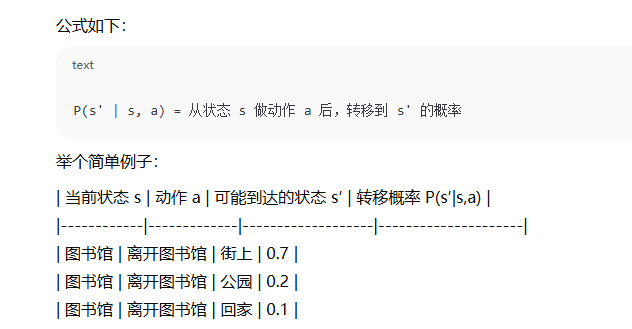
5.如何理解状态转移概率
状态转移概率是指:当你在某个状态下采取某个动作后,会“有多大概率”进入另一个状态
6.马尔可夫决策过程
马尔可夫决策过程就是一个数学框架,帮我们描述一个“智能体”在一个“环境”中做决策的全过程。
在什么状态下,做什么动作,会带来什么奖励,并进入什么下一个状态。MDP = (S, A, P, R, γ)
7.基于价值的智能体和基于策略的智能体
在基于策略的强化学习方法中,智能体会制定一套动作策略(确定在给定状态下需要采取何种动作),并根据这个策略进行操作。强化学习算法直接对策略进行优化,使制定的策略能够获得最大的奖励。而基于策略的强化学习算法有策略梯度(Policy Gradient,PG)算法等。此外,演员-评论员算法同时使用策略和价值评估来做出决策。其中,智能体会根据策略做出动作,而价值函数会对做出的动作给出价值,这样可以在原有的策略梯度算法的基础上加速学习过程,取得更好的效果。
而在基于价值的强化学习方法中,智能体不需要制定显式的策略,它维护一个价值表格或价值函数,并通过这个价值表格或价值函数来选取价值最大的动作。基于价值迭代的方法只能应用在不连续的、离散的环境下(如围棋或某些游戏领域),对于动作集合规模庞大、动作连续的场景(如机器人控制领域),其很难学习到较好的结果(此时基于策略迭代的方法能够根据设定的策略来选择连续的动作)。 基于价值的强化学习算法有Q学习(Q-learning)、 Sarsa 等,

















 210
210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









