









一、前言
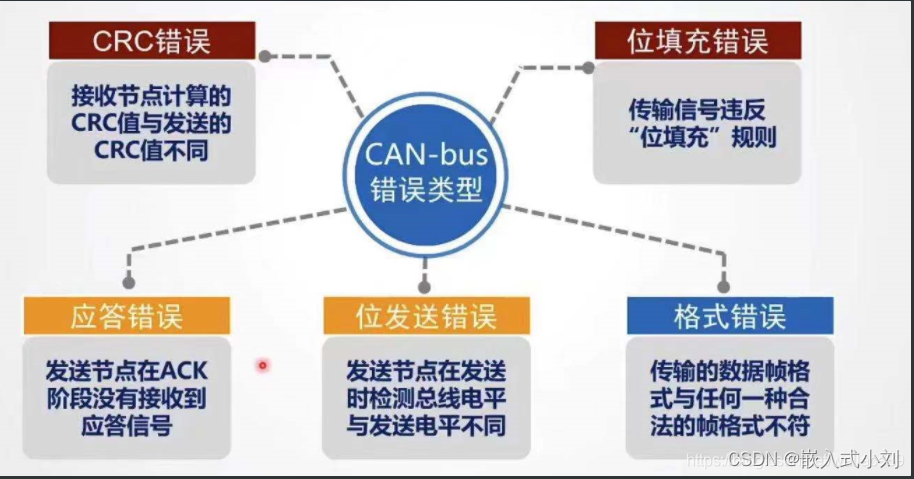
CAN的错误类型有如下图所说的5种,其中:
应答错误与位发送错误会出现在CAN发送的节点(CAN发送端)
CRC错误与位填充错误会出现在CAN接收的节点(CAN接收端)
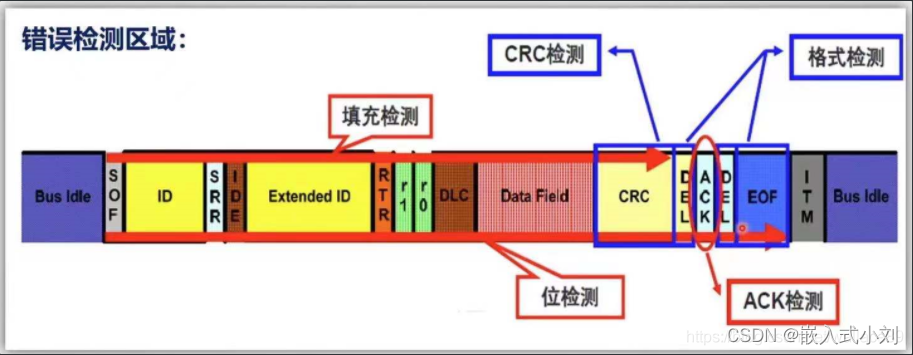
二、错误检测区域
如下是每一个错误发生在CAN报文中的区域,5种错误类型可以同时发生。位检测的区域最长,可以看到采样点的匹配是多么的重要(一般不建议相差超过6% - 7%)。
三、错误帧
错误帧长什么样子?一共有两种错误帧,那到底发哪一种错误帧呢?取决于CAN节点的状态,是主动错误状态还是被动错误状态。

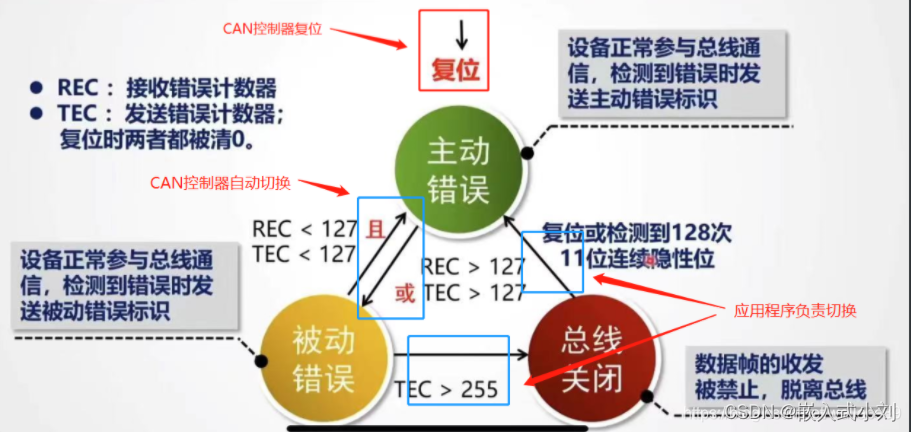
四、CAN节点状态
正常情况下,CAN节点处于主动错误的状态,在主动错误状态下发生错误时,发送错误帧(6个连续显性电平位+8个连续隐性电平位)。
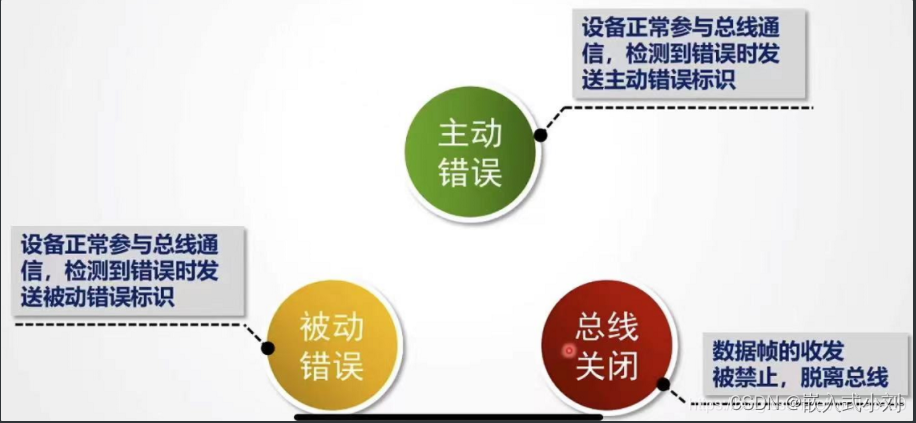
CAN节点在发送错误计数器或接收错误计数器大于127时,CAN节点将进入“被动错误”状态,并发送错误帧(6个连续隐性电平位+8个连续隐性电平位)。在发送错误或者接收错误减少之后,又会切换回“主动错误”状态。当发送错误计数器大于255时,CAN节点将进入“总线关闭(Bus_Off)”状态,脱离CAN总线,不影响其他CAN节点的通讯。值得注意的是,应用程序负责将CAN控制器切换到“总线关闭(Bus_Off)”的状态,CAN控制器不会自动切换到“总线关闭”状态。
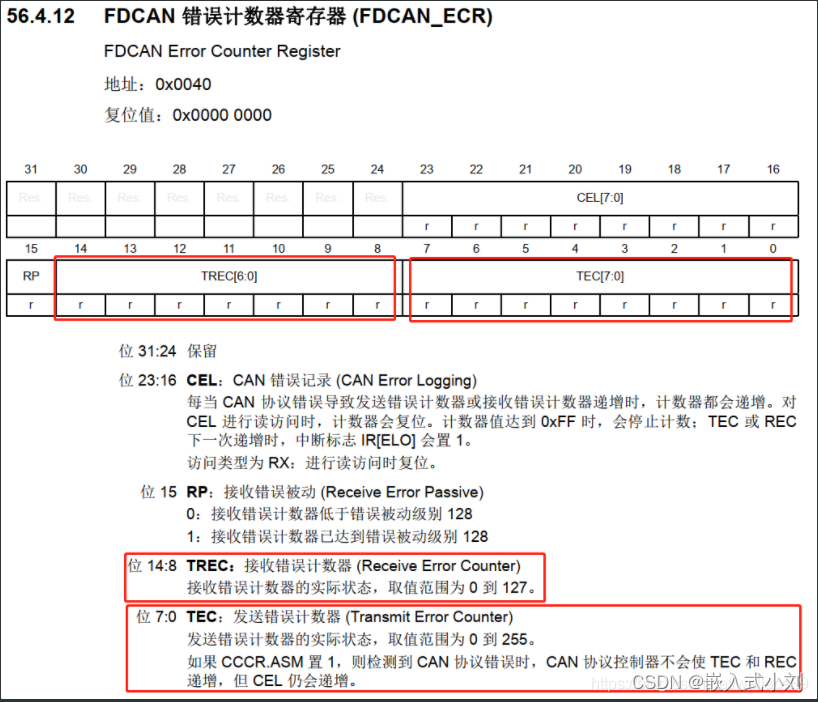
4.1、FDCAN错误计数器寄存器(FDCAN_ECR)
最近正在使用STM32H743开发CANopen节点,看看FDCAN控制器到底有没有REC与TEC寄存器。通过查看STM32H743的编程参考手册,找到错误计数器寄存器。在这个计数器里面能找到TREC(接收错误计数器)与TEC(发送错误计数器),如下图所示。
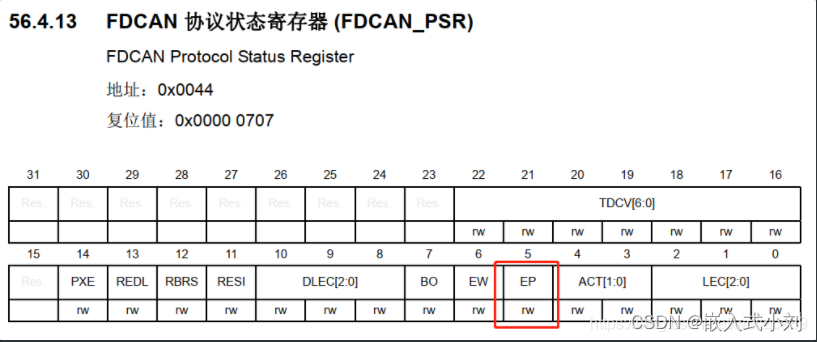
4.2、FDCAN协议状态寄存器(FDCAN_PSR)
CAN节点的状态,从这个寄存器可以了解CAN节点在哪个错误状态(主动错误或被动错误)。
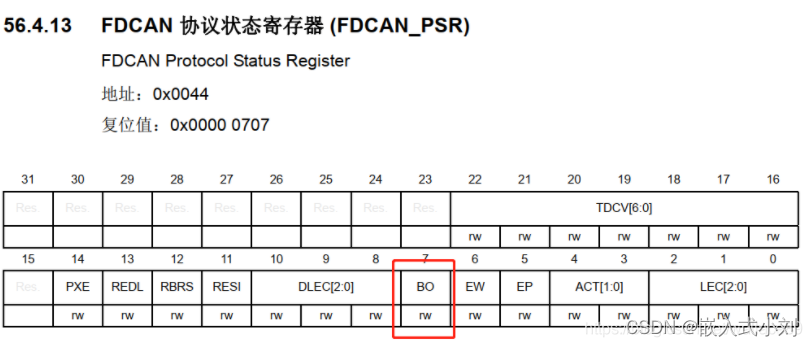
接着,也找到了总线关闭(Bus_Off)寄存器。经过测试看到,当接收错误或发送错误一直累加到最后不能累加时,Bus_Off寄存器并没有发生变化,所以Bus_Off是需要应用程序去修改的。
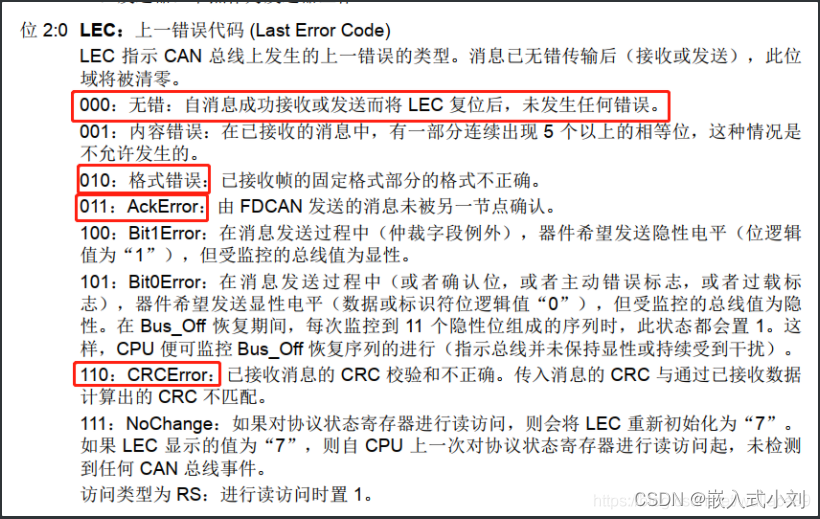
最后,也能看到从LEC位找到上一个CAN错误的类型。当然啦,LEC位等于000最好!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









