







转载 Android 8.0系统源码分析–openCamera(HAL)启动过程源码分析
前面我们详细分析了从应用层调用CameraManager的openCamera的方法来打开相机的逻辑,上次的分析我们来到了CameraServer进程当中,但是还没有真正看到open操作设备节点来实现真正打开的逻辑,遗留的问题也就是从frameworks\av\services\camera\libcameraservice\device3\Camera3Device.cpp文件中的status_t Camera3Device::initialize(sp manager)方法的status_t res = manager->openSession(mId.string(), this, /out/ &session);这句代码进去后进行的处理。
我们知道,Android的内核是Linux内核,Linux上所有的设备都被抽象成文件节点,对设备的操作都变成了对文件节点的操作,非常方便,我们openCamera的逻辑最终肯定也是通过open系统函数来打开camera的文件节点,而open系统调用的处理就是对应的camera驱动了。
好,我们回到正文,status_t res = manager->openSession(mId.string(), this, /out/ &session);这句逻辑中的manager是一个sp对象,那我们就来看一下frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp文件中的openSession方法的实现,源码如下:
status_t CameraProviderManager::openSession(const std::string &id,
const sp<hardware::camera::device::V3_2::ICameraDeviceCallback>& callback,
/*out*/
sp<hardware::camera::device::V3_2::ICameraDeviceSession> *session) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
auto deviceInfo = findDeviceInfoLocked(id,
/*minVersion*/ {3,0}, /*maxVersion*/ {4,0});
if (deviceInfo == nullptr) return NAME_NOT_FOUND;
auto *deviceInfo3 = static_cast<ProviderInfo::DeviceInfo3*>(deviceInfo);
Status status;
hardware::Return<void> ret;
ret = deviceInfo3->mInterface->open(callback, [&status, &session]
(Status s, const sp<device::V3_2::ICameraDeviceSession>& cameraSession) {
status = s;
if (status == Status::OK) {
*session = cameraSession;
}
});
if (!ret.isOk()) {
ALOGE("%s: Transaction error opening a session for camera device %s: %s",
__FUNCTION__, id.c_str(), ret.description().c_str());
return DEAD_OBJECT;
}
return mapToStatusT(status);
}
该方法中根据传入的最小和最大版本号调用findDeviceInfoLocked方法获取到一个DeviceInfo对象,其中的逻辑比较简单,源码如下:
CameraProviderManager::ProviderInfo::DeviceInfo* CameraProviderManager::findDeviceInfoLocked(
const std::string& id,
hardware::hidl_version minVersion, hardware::hidl_version maxVersion) const {
for (auto& provider : mProviders) {
for (auto& deviceInfo : provider->mDevices) {
if (deviceInfo->mId == id &&
minVersion <= deviceInfo->mVersion && maxVersion >= deviceInfo->mVersion) {
return deviceInfo.get();
}
}
}
return nullptr;
}
可以看到,该方法的逻辑就是对成员变量mProviders进行遍历,判断每个DeviceInfo的id值、最小版本、最大版本号是否符合传入的最小和最大版本,符合的话,就返回该对象,那我们就要问一下了,mProviders中的值是什么时候添加的呢?我们大概追究一下,它是在CameraService进行启动时,初始化CameraProviderManager对象的逻辑中,通过addProviderLocked方法生成具体的DeviceInfo对象,添加到mProviders成员变量中的。addProviderLocked方法的源码如下:
status_t CameraProviderManager::addProviderLocked(const std::string& newProvider, bool expected) {
for (const auto& providerInfo : mProviders) {
if (providerInfo->mProviderName == newProvider) {
ALOGW("%s: Camera provider HAL with name '%s' already registered", __FUNCTION__,
newProvider.c_str());
return ALREADY_EXISTS;
}
}
sp<provider::V2_4::ICameraProvider> interface;
interface = mServiceProxy->getService(newProvider);
if (interface == nullptr) {
if (expected) {
ALOGE("%s: Camera provider HAL '%s' is not actually available", __FUNCTION__,
newProvider.c_str());
return BAD_VALUE;
} else {
return OK;
}
}
sp<ProviderInfo> providerInfo =
new ProviderInfo(newProvider, interface, this);
status_t res = providerInfo->initialize();
if (res != OK) {
return res;
}
mProviders.push_back(providerInfo);
return OK;
}
这个方法中有一个非常重要的对象,就是interface = mServiceProxy->getService(newProvider)逻辑返回的interface,它又是一个binder对象,获取camera属性、数量等实质性的方法都是通过它来完成的,获取成功后,以它为参数构造一个ProviderInfo对象,最后添加到mProviders成员变量当中。
getService(newProvider)是在头文件里定义的:CameraProviderManager.h
// Standard use case - call into the normal generated static methods which invoke
// the real hardware service manager
struct HardwareServiceInteractionProxy : public ServiceInteractionProxy {
virtual bool registerForNotifications(
const std::string &serviceName,
const sp<hidl::manager::V1_0::IServiceNotification>
¬ification) override {
return hardware::camera::provider::V2_4::ICameraProvider::registerForNotifications(
serviceName, notification);
}
virtual sp<hardware::camera::provider::V2_4::ICameraProvider> getService(
const std::string &serviceName) override {
return hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName);
}
};
static HardwareServiceInteractionProxy sHardwareServiceInteractionProxy;
/**
* Initialize the manager and give it a status listener; optionally accepts a service
* interaction proxy.
*
* The default proxy communicates via the hardware service manager; alternate proxies can be
* used for testing. The lifetime of the proxy must exceed the lifetime of the manager.
*/
status_t initialize(wp<StatusListener> listener,
ServiceInteractionProxy *proxy = &sHardwareServiceInteractionProxy);
好了,我们回到openSession方法当中,找到deviceInfo对象之后,然后调用deviceInfo3->mInterface->open,而它的成员变量mInterface就是在前面我们说构造ProviderInfo时获取到的binder对象了,它实际上是hardware\interfaces\camera\device\3.2\default\CameraDevice.cpp对象了,来到这里,我们就进入了CameraDaemon进程当中,两个进程的通信是通过HIDL,其实还是binder进程间通信机制,只是它是用来提供给HAL层服务的,所以和AIDL类似,取了个HIDL的名字。这里需要说一下,为是什么是3.2下面的这个类呢?因为我们在调用openSession方法时,传入的第二个参数const sphardware::camera::device::V3_2::ICameraDeviceCallback& callback和第三个参数sphardware::camera::device::V3_2::ICameraDeviceSession *session就可以非常明显的看出来,当前调用的版本是V3_2。接下来,我们就来看一下CameraDevice.cpp类的open方法的实现,源码如下:
Return<void> CameraDevice::open(const sp<ICameraDeviceCallback>& callback, open_cb _hidl_cb) {
Status status = initStatus();
sp<CameraDeviceSession> session = nullptr;
if (callback == nullptr) {
ALOGE("%s: cannot open camera %s. callback is null!",
__FUNCTION__, mCameraId.c_str());
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
if (status != Status::OK) {
// Provider will never pass initFailed device to client, so
// this must be a disconnected camera
ALOGE("%s: cannot open camera %s. camera is disconnected!",
__FUNCTION__, mCameraId.c_str());
_hidl_cb(Status::CAMERA_DISCONNECTED, nullptr);
return Void();
} else {
mLock.lock();
ALOGV("%s: Initializing device for camera %d", __FUNCTION__, mCameraIdInt);
session = mSession.promote();
if (session != nullptr && !session->isClosed()) {
ALOGE("%s: cannot open an already opened camera!", __FUNCTION__);
mLock.unlock();
_hidl_cb(Status::CAMERA_IN_USE, nullptr);
return Void();
}
/** Open HAL device */
status_t res;
camera3_device_t *device;
ATRACE_BEGIN("camera3->open");
res = mModule->open(mCameraId.c_str(),
reinterpret_cast<hw_device_t**>(&device));
ATRACE_END();
if (res != OK) {
ALOGE("%s: cannot open camera %s!", __FUNCTION__, mCameraId.c_str());
mLock.unlock();
_hidl_cb(getHidlStatus(res), nullptr);
return Void();
}
/** Cross-check device version */
if (device->common.version < CAMERA_DEVICE_API_VERSION_3_2) {
ALOGE("%s: Could not open camera: "
"Camera device should be at least %x, reports %x instead",
__FUNCTION__,
CAMERA_DEVICE_API_VERSION_3_2,
device->common.version);
device->common.close(&device->common);
mLock.unlock();
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
struct camera_info info;
res = mModule->getCameraInfo(mCameraIdInt, &info);
if (res != OK) {
ALOGE("%s: Could not open camera: getCameraInfo failed", __FUNCTION__);
device->common.close(&device->common);
mLock.unlock();
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
session = createSession(
device, info.static_camera_characteristics, callback);
if (session == nullptr) {
ALOGE("%s: camera device session allocation failed", __FUNCTION__);
mLock.unlock();
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
if (session->isInitFailed()) {
ALOGE("%s: camera device session init failed", __FUNCTION__);
session = nullptr;
mLock.unlock();
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
mSession = session;
IF_ALOGV() {
session->getInterface()->interfaceChain([](
::android::hardware::hidl_vec<::android::hardware::hidl_string> interfaceChain) {
ALOGV("Session interface chain:");
for (auto iface : interfaceChain) {
ALOGV(" %s", iface.c_str());
}
});
}
mLock.unlock();
}
_hidl_cb(status, session->getInterface());
return Void();
}
我们先来看一下该方法的参数,第一个是callback对象,它的使用方法和我们之前讲的应用层调用openCamera时在CameraManager中传入的binder类型的callback是一样的,Server端拿到这个callback之后,就可以针对需要的节点事件回调应用层,而这里是在CameraDaemon回调CameraServer,道理是一样的。这个callback参数最终赋值给HAL层中的CameraDeviceSession类的mResultBatcher成员变量了;第二个参数是open_cb类型,从它的命名中可以看出来,它也是一个回调函数,非常方便,就像一个函数指针一样,它在CameraProviderManager一侧中像一个结构体一样传了过来,当CameraDevice类中的open执行完成后,就会将session对象作为参数回传到CameraProviderManager这一侧,我们就拿到了session,后续对camera的操作都是通过这个sesson对象来进行中转完成的。CameraProviderManager这一侧传入的结构体如下:
hardware::Return<void> ret;
ret = deviceInfo3->mInterface->open(callback, [&status, &session]
(Status s, const sp<device::V3_2::ICameraDeviceSession>& cameraSession) {
status = s;
if (status == Status::OK) {
*session = cameraSession;
}
});
我们继续阅读代码,open方法中先判断status,正常的话,接着调用res = mModule->open(mCameraId.c_str(), reinterpret_cast<hw_device_t**>(&device))来执行相机的打开操作,mModule对象是CameraDevice类的成员变量,它是在CameraDevice的构造函数中传入的,而CameraDevice类的对象是在hardware\interfaces\camera\provider\2.4\default\CameraProvider.cpp文件中的getCameraDeviceInterface_V3_x方法中构造的,该方法也是CameraDaemon进程为CameraServer进程提供的,当添加相机设备时,CameraServer就需要查询和获取camera设备,也就会使用到这个接口,getCameraDeviceInterface_V3_x方法源码如下:
sp<CameraModule> mModule;
Return<void> CameraProvider::getCameraDeviceInterface_V3_x(
const hidl_string& cameraDeviceName, getCameraDeviceInterface_V3_x_cb _hidl_cb) {
std::string cameraId, deviceVersion;
bool match = matchDeviceName(cameraDeviceName, &deviceVersion, &cameraId);
if (!match) {
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
std::string deviceName(cameraDeviceName.c_str());
ssize_t index = mCameraDeviceNames.indexOf(std::make_pair(cameraId, deviceName));
if (index == NAME_NOT_FOUND) { // Either an illegal name or a device version mismatch
Status status = Status::OK;
ssize_t idx = mCameraIds.indexOf(cameraId);
if (idx == NAME_NOT_FOUND) {
ALOGE("%s: cannot find camera %s!", __FUNCTION__, cameraId.c_str());
status = Status::ILLEGAL_ARGUMENT;
} else { // invalid version
ALOGE("%s: camera device %s does not support version %s!",
__FUNCTION__, cameraId.c_str(), deviceVersion.c_str());
status = Status::OPERATION_NOT_SUPPORTED;
}
_hidl_cb(status, nullptr);
return Void();
}
if (mCameraStatusMap.count(cameraId) == 0 ||
mCameraStatusMap[cameraId] != CAMERA_DEVICE_STATUS_PRESENT) {
_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);
return Void();
}
sp<android::hardware::camera::device::V3_2::ICameraDevice> device;
if (deviceVersion == kHAL3_4) {
ALOGV("Constructing v3.4 camera device");
sp<android::hardware::camera::device::V3_2::implementation::CameraDevice> deviceImpl =
new android::hardware::camera::device::V3_4::implementation::CameraDevice(
mModule, cameraId, mCameraDeviceNames);
if (deviceImpl == nullptr || deviceImpl->isInitFailed()) {
ALOGE("%s: camera device %s init failed!", __FUNCTION__, cameraId.c_str());
device = nullptr;
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
device = deviceImpl;
_hidl_cb (Status::OK, device);
return Void();
}
// Since some Treble HAL revisions can map to the same legacy HAL version(s), we default
// to the newest possible Treble HAL revision, but allow for override if needed via
// system property.
switch (mPreferredHal3MinorVersion) {
case 2: { // Map legacy camera device v3 HAL to Treble camera device HAL v3.2
ALOGV("Constructing v3.2 camera device");
sp<android::hardware::camera::device::V3_2::implementation::CameraDevice> deviceImpl =
new android::hardware::camera::device::V3_2::implementation::CameraDevice(
mModule, cameraId, mCameraDeviceNames);
if (deviceImpl == nullptr || deviceImpl->isInitFailed()) {
ALOGE("%s: camera device %s init failed!", __FUNCTION__, cameraId.c_str());
device = nullptr;
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
device = deviceImpl;
break;
}
case 3: { // Map legacy camera device v3 HAL to Treble camera device HAL v3.3
ALOGV("Constructing v3.3 camera device");
sp<android::hardware::camera::device::V3_2::implementation::CameraDevice> deviceImpl =
new android::hardware::camera::device::V3_3::implementation::CameraDevice(
mModule, cameraId, mCameraDeviceNames);
if (deviceImpl == nullptr || deviceImpl->isInitFailed()) {
ALOGE("%s: camera device %s init failed!", __FUNCTION__, cameraId.c_str());
device = nullptr;
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
device = deviceImpl;
break;
}
default:
ALOGE("%s: Unknown HAL minor version %d!", __FUNCTION__, mPreferredHal3MinorVersion);
device = nullptr;
_hidl_cb(Status::INTERNAL_ERROR, nullptr);
return Void();
}
_hidl_cb (Status::OK, device);
return Void();
}
可以看到,在构造CameraDevice对象时,传入的第一个参数mModule,它也是CameraProvider类的成员变量,它的定义在hardware\interfaces\camera\provider\2.4\default\CameraProvider.h头文件中,源码如下:
它是一个CameraModule对象,那么我们接下来就看看hardware\interfaces\camera\common\1.0\default\CameraModule.cpp类的open方法,来看看它是如何处理的。它的open方法源码如下:
int CameraModule::open(const char* id, struct hw_device_t** device) {
int res;
ATRACE_BEGIN("camera_module->open");
res = filterOpenErrorCode(mModule->common.methods->open(&mModule->common, id, device));
ATRACE_END();
return res;
}
该方法非常简洁,就是调用mModule类的common.methods的open方法处理,它的mModule也是在CameraModule类的构造函数中传入的,而CameraModule的构造方法是在CameraProvider类的initialize()方法中调用的,源码如下:
bool CameraProvider::initialize() {
camera_module_t *rawModule;
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
if (err < 0) {
ALOGE("Could not load camera HAL module: %d (%s)", err, strerror(-err));
return true;
}
mModule = new CameraModule(rawModule);
err = mModule->init();
if (err != OK) {
ALOGE("Could not initialize camera HAL module: %d (%s)", err, strerror(-err));
mModule.clear();
return true;
}
ALOGI("Loaded \"%s\" camera module", mModule->getModuleName());
// Setup vendor tags here so HAL can setup vendor keys in camera characteristics
VendorTagDescriptor::clearGlobalVendorTagDescriptor();
if (!setUpVendorTags()) {
ALOGE("%s: Vendor tag setup failed, will not be available.", __FUNCTION__);
}
// Setup callback now because we are going to try openLegacy next
err = mModule->setCallbacks(this);
if (err != OK) {
ALOGE("Could not set camera module callback: %d (%s)", err, strerror(-err));
mModule.clear();
return true;
}
mPreferredHal3MinorVersion =
property_get_int32("ro.vendor.camera.wrapper.hal3TrebleMinorVersion", 3);
ALOGV("Preferred HAL 3 minor version is %d", mPreferredHal3MinorVersion);
switch(mPreferredHal3MinorVersion) {
case 2:
case 3:
// OK
break;
default:
ALOGW("Unknown minor camera device HAL version %d in property "
"'camera.wrapper.hal3TrebleMinorVersion', defaulting to 3",
mPreferredHal3MinorVersion);
mPreferredHal3MinorVersion = 3;
}
mNumberOfLegacyCameras = mModule->getNumberOfCameras();
for (int i = 0; i < mNumberOfLegacyCameras; i++) {
struct camera_info info;
auto rc = mModule->getCameraInfo(i, &info);
if (rc != NO_ERROR) {
ALOGE("%s: Camera info query failed!", __func__);
mModule.clear();
return true;
}
if (checkCameraVersion(i, info) != OK) {
ALOGE("%s: Camera version check failed!", __func__);
mModule.clear();
return true;
}
char cameraId[kMaxCameraIdLen];
snprintf(cameraId, sizeof(cameraId), "%d", i);
std::string cameraIdStr(cameraId);
mCameraStatusMap[cameraIdStr] = CAMERA_DEVICE_STATUS_PRESENT;
addDeviceNames(i);
}
return false; // mInitFailed
}
======================================== V4l2 代替 ==========================================
这里构造CameraModule时传入的参数rawModule就是在该方法一开始时,通过调用int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID, (const hw_module_t **)&rawModule)获取到的,看到这里大家是不是觉得有些熟悉,CAMERA_HARDWARE_MODULE_ID就是HAL层定义的module,
v4l2_camera_hal.cpp :对应了此接口
static hw_module_methods_t v4l2_module_methods = {
.open = v4l2_camera_hal::open_dev};
camera_module_t HAL_MODULE_INFO_SYM __attribute__((visibility("default"))) = {
.common =
{
.tag = HARDWARE_MODULE_TAG,
.module_api_version = CAMERA_MODULE_API_VERSION_2_4,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = CAMERA_HARDWARE_MODULE_ID,
.name = "V4L2 Camera HAL v3",
.author = "The Android Open Source Project",
.methods = &v4l2_module_methods,
.dso = nullptr,
.reserved = {0},
},
.get_number_of_cameras = v4l2_camera_hal::get_number_of_cameras,
.get_camera_info = v4l2_camera_hal::get_camera_info,
.set_callbacks = v4l2_camera_hal::set_callbacks,
.get_vendor_tag_ops = v4l2_camera_hal::get_vendor_tag_ops,
.open_legacy = v4l2_camera_hal::open_legacy,
.set_torch_mode = v4l2_camera_hal::set_torch_mode,
.init = nullptr,
.reserved = {nullptr, nullptr, nullptr, nullptr, nullptr}};
接着打开camera
static int open_dev(const hw_module_t* module,
const char* name,
hw_device_t** device) {
return gCameraHAL.openDevice(module, name, device);
}
int V4L2CameraHAL::openDevice(const hw_module_t* module,
const char* name,
hw_device_t** device) {
HAL_LOG_ENTER();
if (module != &HAL_MODULE_INFO_SYM.common) {
HAL_LOGE(
"Invalid module %p expected %p", module, &HAL_MODULE_INFO_SYM.common);
return -EINVAL;
}
int id;
if (!android::base::ParseInt(name, &id, 0, getNumberOfCameras() - 1)) {
HAL_LOGV("opendevice returns error");
return -EINVAL;
}
// TODO(b/29185945): Hotplugging: return -EINVAL if unplugged.
return mCameras[id]->openDevice(module, device);
}
最重要的是mCameras[id]->openDevice(module, device),而mCameras是V4L2CameraHAL构造的时候创建,opendir(“/dev”) 遍历node将设备放进去
// Default global camera hal.
static V4L2CameraHAL gCameraHAL;
V4L2CameraHAL::V4L2CameraHAL() : mCameras(), mCallbacks(NULL) {
HAL_LOG_ENTER();
// Adds all available V4L2 devices.
// List /dev nodes.
DIR* dir = opendir("/dev");
if (dir == NULL) {
HAL_LOGE("Failed to open /dev");
return;
}
// Find /dev/video* nodes.
dirent* ent;
std::vector<std::string> nodes;
while ((ent = readdir(dir))) {
std::string desired = "video";
size_t len = desired.size();
if (strncmp(desired.c_str(), ent->d_name, len) == 0) {
if (strlen(ent->d_name) > len && isdigit(ent->d_name[len])) {
// ent is a numbered video node.
nodes.push_back(std::string("/dev/") + ent->d_name);
HAL_LOGV("Found video node %s.", nodes.back().c_str());
}
}
}
std::sort(nodes.begin(),nodes.end());
// Test each for V4L2 support and uniqueness.
std::unordered_set<std::string> buses;
std::string bus;
v4l2_capability cap;
int fd;
int id = 0;
for (const auto& node : nodes) {
// Open the node.
if (strcmp(node.c_str(), FRONT_CAMERA_NODE) == 0 || strcmp(node.c_str(), REAR_CAMERA_NODE) == 0)
{
fd = TEMP_FAILURE_RETRY(open(node.c_str(), O_RDWR));
if (fd < 0) {
HAL_LOGE("failed to open %s (%s).", node.c_str(), strerror(errno));
continue;
}
HAL_LOGV("VIDIOC_QUERYCAP on video node %s",node.c_str());
// Read V4L2 capabilities.
if (TEMP_FAILURE_RETRY(ioctl(fd, VIDIOC_QUERYCAP, &cap)) != 0) {
HAL_LOGE(
"VIDIOC_QUERYCAP on %s fail: %s.", node.c_str(), strerror(errno));
} else if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE)) {
HAL_LOGE("%s is not a V4L2 video capture device.", node.c_str());
} else {
// If the node is unique, add a camera for it.
bus = reinterpret_cast<char*>(cap.bus_info);
if (buses.insert(bus).second) {
HAL_LOGV("Found unique bus at %s.", node.c_str());
std::unique_ptr<V4L2Camera> cam(V4L2Camera::NewV4L2Camera(id++, node));
if (cam) {
mCameras.push_back(std::move(cam));
} else {
HAL_LOGE("Failed to initialize camera at %s.", node.c_str());
}
HAL_LOGE("device:%s create over", node.c_str());
}
}
close(fd);
}
else
{
continue;
}
}
}
让我们看看openDevice(const hw_module_t *module, hw_device_t **device),两个参数一个是hw_module_t,另一个是hw_device_t
v4l2_camera.cpp:
int Camera::openDevice(const hw_module_t *module, hw_device_t **device)
{
HAL_LOGV("Id:%d:Opening camera device", mId);
ATRACE_CALL();
android::Mutex::Autolock al(mDeviceLock);
if (mBusy) {
HAL_LOGE("Id:%d: Error! Camera device already opened", mId);
return -EBUSY;
}
int connectResult = connect();
if (connectResult != 0) {
return connectResult;
}
mBusy = true;
mDevice.common.module = const_cast<hw_module_t*>(module);
*device = &mDevice.common;
HAL_LOGV("---------------x Id:%d", mId);
return 0;
}
int V4L2Camera::connect() {
HAL_LOG_ENTER();
if (connection_) {
HAL_LOGE("Already connected. Please disconnect and try again.");
return -EIO;
}
connection_.reset(new V4L2Wrapper::Connection(device_));
if (connection_->status()) {
HAL_LOGE("Failed to connect to device.");
return connection_->status();
}
device_->Init();
device_->StreamOn();
// TODO(b/29185945): confirm this is a supported device.
// This is checked by the HAL, but the device at |device_|'s path may
// not be the same one that was there when the HAL was loaded.
// (Alternatively, better hotplugging support may make this unecessary
// by disabling cameras that get disconnected and checking newly connected
// cameras, so connect() is never called on an unsupported camera)
// TODO(b/29158098): Inform service of any flashes that are no longer
// available because this camera is in use.
HAL_LOG_EXIT();
return 0;
}
======================================== 此处为原文 ==========================================
这里构造CameraModule时传入的参数rawModule就是在该方法一开始时,通过调用int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID, (const hw_module_t **)&rawModule)获取到的,看到这里大家是不是觉得有些熟悉,CAMERA_HARDWARE_MODULE_ID就是HAL层定义的module,从这里往下就和对应的设备厂商有密切关系了,当然具体的实现也就差别很大了,而不像我们前面到这里,不分厂商,所有设备,只要是android都是通用的。好了,我这里下载的8.0源码中提供了三个厂商的实现,分别命名为google、huawei、lge,截图如下:
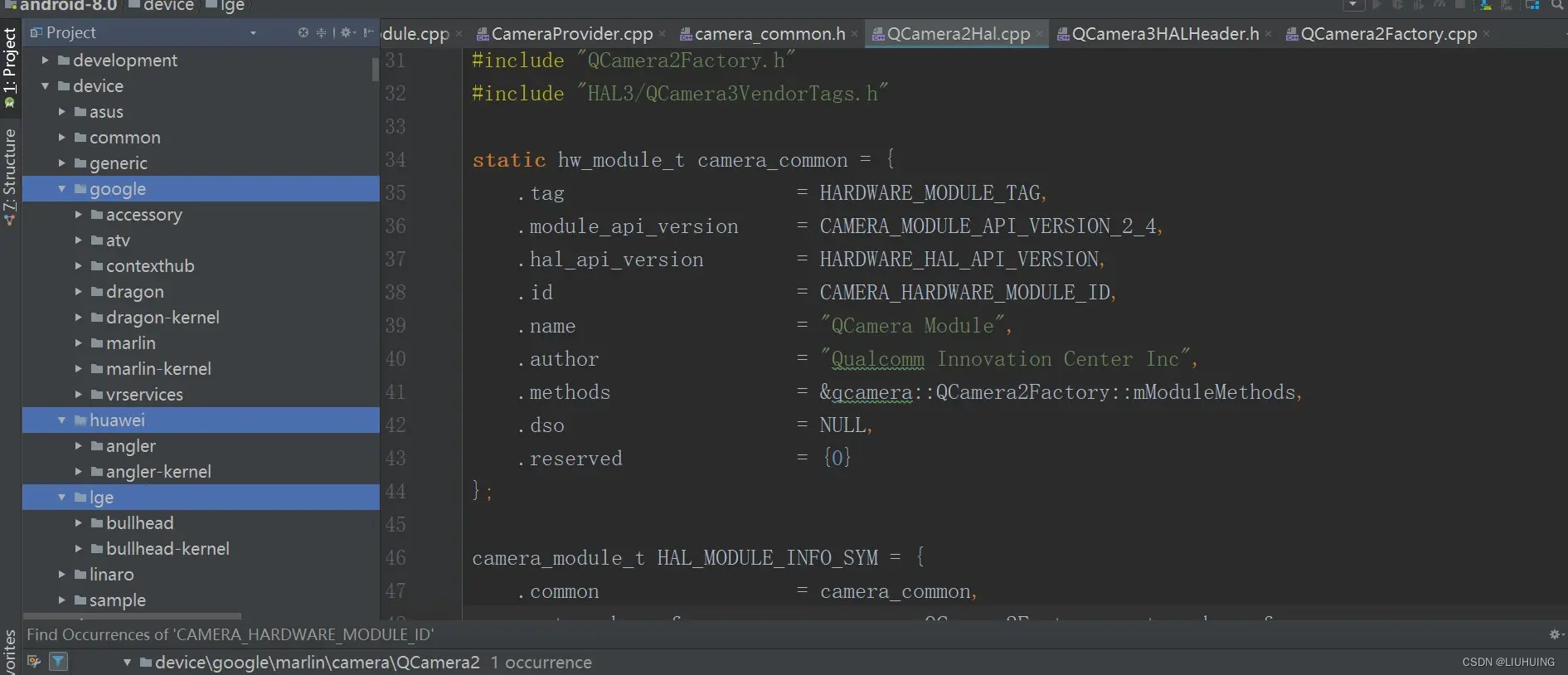
google目录下具体的实现使用的是高通的设备,我们就来看看这个是怎么实现的。高通相机中的hw_module_t、camera_module_t两个结构体定义在device\google\marlin\camera\QCamera2\QCamera2Hal.cpp文件中,在CameraProvider类的initialize()方法中调用hw_get_module获取到的就是这里定义的camera_module_t,它也就是构造CameraModule时传入的参数,好了,回到CameraModule类的open方法中,继续调用它的common(这里就是camera_module_t结构体的第一个成员变量common了,它指向camera_common结构体)的methods(就是static hw_module_t camera_common结构体的倒数第三个属性methods了,它指向&qcamera::QCamera2Factory::mModuleMethods)的open方法,我们还是以goole目录下高通的实现为例,继续看一下QCamera2Factory类的mModuleMethods的定义,device\google\marlin\camera\QCamera2\QCamera2Factory.cpp文件中的mModuleMethods定义源码如下:
struct hw_module_methods_t QCamera2Factory::mModuleMethods = {
.open = QCamera2Factory::camera_device_open,
};
这里的open又指向了QCamera2Factory类的camera_device_open方法,该方法的源码如下:
int QCamera2Factory::camera_device_open(
const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
if (module != &HAL_MODULE_INFO_SYM.common) {
LOGE("Invalid module. Trying to open %p, expect %p",
module, &HAL_MODULE_INFO_SYM.common);
return INVALID_OPERATION;
}
if (!id) {
LOGE("Invalid camera id");
return BAD_VALUE;
}
if(gQCameraMuxer)
rc = gQCameraMuxer->camera_device_open(module, id, hw_device);
else
rc = gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);
return rc;
}
这里先判断成员变量gQCameraMuxer是否为空,它是在QCamera2Factory类的构造函数中,判断如果当前为双摄(bDualCamera为true,它是通过配置项persist.camera.dual.camera获取的)的情况下获取的,这里我们假设它不为空,那么就调用rc = gQCameraMuxer->camera_device_open(module, id, hw_device)来继续打开camera,gQCameraMuxer的类型为QCameraMuxer,接下来看一下device\google\marlin\camera\QCamera2\HAL\QCameraMuxer.cpp类中的camera_device_open方法的实现,源码如下:
int QCameraMuxer::camera_device_open(
__unused const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
LOGH("id= %d",atoi(id));
if (!id) {
LOGE("Invalid camera id");
return BAD_VALUE;
}
rc = gMuxer->cameraDeviceOpen(atoi(id), hw_device);
LOGH("id= %d, rc: %d", atoi(id), rc);
return rc;
}
该方法的逻辑也非常简洁,参数正确,就接着调用gMuxer变量的cameraDeviceOpen方法来处理,gMuxer就是当前类的实例,它的cameraDeviceOpen方法的源码如下:
int QCameraMuxer::cameraDeviceOpen(int camera_id,
struct hw_device_t **hw_device)
{
int rc = NO_ERROR;
uint32_t phyId = 0;
qcamera_logical_descriptor_t *cam = NULL;
if (camera_id < 0 || camera_id >= m_nLogicalCameras) {
LOGE("Camera id %d not found!", camera_id);
return -ENODEV;
}
if ( NULL == m_pLogicalCamera) {
LOGE("Hal descriptor table is not initialized!");
return NO_INIT;
}
char prop[PROPERTY_VALUE_MAX];
property_get("persist.camera.dc.frame.sync", prop, "1");
m_bFrameSyncEnabled = atoi(prop);
// Get logical camera
cam = &m_pLogicalCamera[camera_id];
if (m_pLogicalCamera[camera_id].device_version ==
CAMERA_DEVICE_API_VERSION_1_0) {
// HW Dev Holders
hw_device_t *hw_dev[cam->numCameras];
if (m_pPhyCamera[cam->pId[0]].type != CAM_TYPE_MAIN) {
LOGE("Physical camera at index 0 is not main!");
return UNKNOWN_ERROR;
}
// Open all physical cameras
for (uint32_t i = 0; i < cam->numCameras; i++) {
phyId = cam->pId[i];
QCamera2HardwareInterface *hw =
new QCamera2HardwareInterface((uint32_t)phyId);
if (!hw) {
LOGE("Allocation of hardware interface failed");
return NO_MEMORY;
}
hw_dev[i] = NULL;
// Make Camera HWI aware of its mode
cam_sync_related_sensors_event_info_t info;
info.sync_control = CAM_SYNC_RELATED_SENSORS_ON;
info.mode = m_pPhyCamera[phyId].mode;
info.type = m_pPhyCamera[phyId].type;
rc = hw->setRelatedCamSyncInfo(&info);
hw->setFrameSyncEnabled(m_bFrameSyncEnabled);
if (rc != NO_ERROR) {
LOGE("setRelatedCamSyncInfo failed %d", rc);
delete hw;
return rc;
}
rc = hw->openCamera(&hw_dev[i]);
if (rc != NO_ERROR) {
delete hw;
return rc;
}
hw->getCameraSessionId(&m_pPhyCamera[phyId].camera_server_id);
m_pPhyCamera[phyId].dev = reinterpret_cast<camera_device_t*>(hw_dev[i]);
m_pPhyCamera[phyId].hwi = hw;
cam->sId[i] = m_pPhyCamera[phyId].camera_server_id;
LOGH("camera id %d server id : %d hw device %x, hw %x",
phyId, cam->sId[i], hw_dev[i], hw);
}
} else {
LOGE("Device version for camera id %d invalid %d",
camera_id, m_pLogicalCamera[camera_id].device_version);
return BAD_VALUE;
}
cam->dev.common.tag = HARDWARE_DEVICE_TAG;
cam->dev.common.version = HARDWARE_DEVICE_API_VERSION(1, 0);
cam->dev.common.close = close_camera_device;
cam->dev.ops = &mCameraMuxerOps;
cam->dev.priv = (void*)cam;
*hw_device = &cam->dev.common;
return rc;
}
该方法中最重要的就是中间的for循环了,先构造QCamera2HardwareInterface对象,然后调用它的openCamera方法打开camera,接下来就看一下device\google\marlin\camera\QCamera2\HAL3\QCamera3HWI.cpp类的openCamera方法的实现,源码如下:
int QCamera3HardwareInterface::openCamera(struct hw_device_t **hw_device)
{
int rc = 0;
if (mState != CLOSED) {
*hw_device = NULL;
return PERMISSION_DENIED;
}
m_perfLock.lock_acq();
LOGI("[KPI Perf]: E PROFILE_OPEN_CAMERA camera id %d",
mCameraId);
rc = openCamera();
if (rc == 0) {
*hw_device = &mCameraDevice.common;
} else
*hw_device = NULL;
m_perfLock.lock_rel();
LOGI("[KPI Perf]: X PROFILE_OPEN_CAMERA camera id %d, rc: %d",
mCameraId, rc);
if (rc == NO_ERROR) {
mState = OPENED;
}
return rc;
}
它又是转调另一个openCamera方法来处理的,源码如下:
int QCamera3HardwareInterface::openCamera()
{
int rc = 0;
char value[PROPERTY_VALUE_MAX];
KPI_ATRACE_CALL();
if (mCameraHandle) {
LOGE("Failure: Camera already opened");
return ALREADY_EXISTS;
}
rc = QCameraFlash::getInstance().reserveFlashForCamera(mCameraId);
if (rc < 0) {
LOGE("Failed to reserve flash for camera id: %d",
mCameraId);
return UNKNOWN_ERROR;
}
rc = camera_open((uint8_t)mCameraId, &mCameraHandle);
if (rc) {
LOGE("camera_open failed. rc = %d, mCameraHandle = %p", rc, mCameraHandle);
return rc;
}
if (!mCameraHandle) {
LOGE("camera_open failed. mCameraHandle = %p", mCameraHandle);
return -ENODEV;
}
rc = mCameraHandle->ops->register_event_notify(mCameraHandle->camera_handle,
camEvtHandle, (void *)this);
if (rc < 0) {
LOGE("Error, failed to register event callback");
/* Not closing camera here since it is already handled in destructor */
return FAILED_TRANSACTION;
}
mExifParams.debug_params =
(mm_jpeg_debug_exif_params_t *) malloc (sizeof(mm_jpeg_debug_exif_params_t));
if (mExifParams.debug_params) {
memset(mExifParams.debug_params, 0, sizeof(mm_jpeg_debug_exif_params_t));
} else {
LOGE("Out of Memory. Allocation failed for 3A debug exif params");
return NO_MEMORY;
}
mFirstConfiguration = true;
//Notify display HAL that a camera session is active.
//But avoid calling the same during bootup because camera service might open/close
//cameras at boot time during its initialization and display service will also internally
//wait for camera service to initialize first while calling this display API, resulting in a
//deadlock situation. Since boot time camera open/close calls are made only to fetch
//capabilities, no need of this display bw optimization.
//Use "service.bootanim.exit" property to know boot status.
property_get("service.bootanim.exit", value, "0");
if (atoi(value) == 1) {
pthread_mutex_lock(&gCamLock);
if (gNumCameraSessions++ == 0) {
setCameraLaunchStatus(true);
}
pthread_mutex_unlock(&gCamLock);
}
//fill the session id needed while linking dual cam
pthread_mutex_lock(&gCamLock);
rc = mCameraHandle->ops->get_session_id(mCameraHandle->camera_handle,
&sessionId[mCameraId]);
pthread_mutex_unlock(&gCamLock);
if (rc < 0) {
LOGE("Error, failed to get sessiion id");
return UNKNOWN_ERROR;
} else {
//Allocate related cam sync buffer
//this is needed for the payload that goes along with bundling cmd for related
//camera use cases
m_pRelCamSyncHeap = new QCamera3HeapMemory(1);
rc = m_pRelCamSyncHeap->allocate(sizeof(cam_sync_related_sensors_event_info_t));
if(rc != OK) {
rc = NO_MEMORY;
LOGE("Dualcam: Failed to allocate Related cam sync Heap memory");
return NO_MEMORY;
}
//Map memory for related cam sync buffer
rc = mCameraHandle->ops->map_buf(mCameraHandle->camera_handle,
CAM_MAPPING_BUF_TYPE_SYNC_RELATED_SENSORS_BUF,
m_pRelCamSyncHeap->getFd(0),
sizeof(cam_sync_related_sensors_event_info_t),
m_pRelCamSyncHeap->getPtr(0));
if(rc < 0) {
LOGE("Dualcam: failed to map Related cam sync buffer");
rc = FAILED_TRANSACTION;
return NO_MEMORY;
}
m_pRelCamSyncBuf =
(cam_sync_related_sensors_event_info_t*) DATA_PTR(m_pRelCamSyncHeap,0);
}
LOGH("mCameraId=%d",mCameraId);
return NO_ERROR;
}
这里又转调camera_open方法来处理,camera_open方法的实现是在device\google\marlin\camera\QCamera2\stack\mm-camera-interface\src\mm_camera_interface.c文件中,源码如下:
int32_t camera_open(uint8_t camera_idx, mm_camera_vtbl_t **camera_vtbl)
{
int32_t rc = 0;
mm_camera_obj_t *cam_obj = NULL;
#ifdef QCAMERA_REDEFINE_LOG
mm_camera_set_dbg_log_properties();
#endif
LOGD("E camera_idx = %d\n", camera_idx);
if (camera_idx >= g_cam_ctrl.num_cam) {
LOGE("Invalid camera_idx (%d)", camera_idx);
return -EINVAL;
}
pthread_mutex_lock(&g_intf_lock);
/* opened already */
if(NULL != g_cam_ctrl.cam_obj[camera_idx]) {
/* Add reference */
g_cam_ctrl.cam_obj[camera_idx]->ref_count++;
pthread_mutex_unlock(&g_intf_lock);
LOGD("opened alreadyn");
*camera_vtbl = &g_cam_ctrl.cam_obj[camera_idx]->vtbl;
return rc;
}
cam_obj = (mm_camera_obj_t *)malloc(sizeof(mm_camera_obj_t));
if(NULL == cam_obj) {
pthread_mutex_unlock(&g_intf_lock);
LOGE("no mem");
return -EINVAL;
}
/* initialize camera obj */
memset(cam_obj, 0, sizeof(mm_camera_obj_t));
cam_obj->ctrl_fd = -1;
cam_obj->ds_fd = -1;
cam_obj->ref_count++;
cam_obj->my_hdl = mm_camera_util_generate_handler(camera_idx);
cam_obj->vtbl.camera_handle = cam_obj->my_hdl; /* set handler */
cam_obj->vtbl.ops = &mm_camera_ops;
pthread_mutex_init(&cam_obj->cam_lock, NULL);
/* unlock global interface lock, if not, in dual camera use case,
* current open will block operation of another opened camera obj*/
pthread_mutex_lock(&cam_obj->cam_lock);
pthread_mutex_unlock(&g_intf_lock);
rc = mm_camera_open(cam_obj);
pthread_mutex_lock(&g_intf_lock);
if (rc != 0) {
LOGE("mm_camera_open err = %d", rc);
pthread_mutex_destroy(&cam_obj->cam_lock);
g_cam_ctrl.cam_obj[camera_idx] = NULL;
free(cam_obj);
cam_obj = NULL;
pthread_mutex_unlock(&g_intf_lock);
*camera_vtbl = NULL;
return rc;
} else {
LOGD("Open succeded\n");
g_cam_ctrl.cam_obj[camera_idx] = cam_obj;
pthread_mutex_unlock(&g_intf_lock);
*camera_vtbl = &cam_obj->vtbl;
return 0;
}
}
这里调用malloc给方法变量分配内存,memset初始化,然后接着调用mm_camera_open继续处理,mm_camera_open方法的实现在device\google\marlin\camera\QCamera2\stack\mm-camera-interface\src\mm_camera_interface.c文件中,源码如下:
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{
char dev_name[MM_CAMERA_DEV_NAME_LEN];
int32_t rc = 0;
int8_t n_try=MM_CAMERA_DEV_OPEN_TRIES;
uint8_t sleep_msec=MM_CAMERA_DEV_OPEN_RETRY_SLEEP;
int cam_idx = 0;
const char *dev_name_value = NULL;
int l_errno = 0;
LOGD("begin\n");
if (NULL == my_obj) {
goto on_error;
}
dev_name_value = mm_camera_util_get_dev_name(my_obj->my_hdl);
if (NULL == dev_name_value) {
goto on_error;
}
snprintf(dev_name, sizeof(dev_name), "/dev/%s",
dev_name_value);
sscanf(dev_name, "/dev/video%d", &cam_idx);
LOGD("dev name = %s, cam_idx = %d", dev_name, cam_idx);
do{
n_try--;
errno = 0;
my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK);
l_errno = errno;
LOGD("ctrl_fd = %d, errno == %d", my_obj->ctrl_fd, l_errno);
if((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 )) {
break;
}
LOGE("Failed with %s error, retrying after %d milli-seconds",
strerror(errno), sleep_msec);
usleep(sleep_msec * 1000U);
}while (n_try > 0);
if (my_obj->ctrl_fd < 0) {
LOGE("cannot open control fd of '%s' (%s)\n",
dev_name, strerror(l_errno));
if (l_errno == EBUSY)
rc = -EUSERS;
else
rc = -1;
goto on_error;
} else {
mm_camera_get_session_id(my_obj, &my_obj->sessionid);
LOGH("Camera Opened id = %d sessionid = %d", cam_idx, my_obj->sessionid);
}
#ifdef DAEMON_PRESENT
/* open domain socket*/
n_try = MM_CAMERA_DEV_OPEN_TRIES;
do {
n_try--;
my_obj->ds_fd = mm_camera_socket_create(cam_idx, MM_CAMERA_SOCK_TYPE_UDP);
l_errno = errno;
LOGD("ds_fd = %d, errno = %d", my_obj->ds_fd, l_errno);
if((my_obj->ds_fd >= 0) || (n_try <= 0 )) {
LOGD("opened, break out while loop");
break;
}
LOGD("failed with I/O error retrying after %d milli-seconds",
sleep_msec);
usleep(sleep_msec * 1000U);
} while (n_try > 0);
if (my_obj->ds_fd < 0) {
LOGE("cannot open domain socket fd of '%s'(%s)\n",
dev_name, strerror(l_errno));
rc = -1;
goto on_error;
}
#else /* DAEMON_PRESENT */
cam_status_t cam_status;
cam_status = mm_camera_module_open_session(my_obj->sessionid,
mm_camera_module_event_handler);
if (cam_status < 0) {
LOGE("Failed to open session");
if (cam_status == CAM_STATUS_BUSY) {
rc = -EUSERS;
} else {
rc = -1;
}
goto on_error;
}
#endif /* DAEMON_PRESENT */
pthread_mutex_init(&my_obj->msg_lock, NULL);
pthread_mutex_init(&my_obj->cb_lock, NULL);
pthread_mutex_init(&my_obj->evt_lock, NULL);
PTHREAD_COND_INIT(&my_obj->evt_cond);
LOGD("Launch evt Thread in Cam Open");
snprintf(my_obj->evt_thread.threadName, THREAD_NAME_SIZE, "CAM_Dispatch");
mm_camera_cmd_thread_launch(&my_obj->evt_thread,
mm_camera_dispatch_app_event,
(void *)my_obj);
/* launch event poll thread
* we will add evt fd into event poll thread upon user first register for evt */
LOGD("Launch evt Poll Thread in Cam Open");
snprintf(my_obj->evt_poll_thread.threadName, THREAD_NAME_SIZE, "CAM_evntPoll");
mm_camera_poll_thread_launch(&my_obj->evt_poll_thread,
MM_CAMERA_POLL_TYPE_EVT);
mm_camera_evt_sub(my_obj, TRUE);
/* unlock cam_lock, we need release global intf_lock in camera_open(),
* in order not block operation of other Camera in dual camera use case.*/
pthread_mutex_unlock(&my_obj->cam_lock);
LOGD("end (rc = %d)\n", rc);
return rc;
on_error:
if (NULL == dev_name_value) {
LOGE("Invalid device name\n");
rc = -1;
}
if (NULL == my_obj) {
LOGE("Invalid camera object\n");
rc = -1;
} else {
if (my_obj->ctrl_fd >= 0) {
close(my_obj->ctrl_fd);
my_obj->ctrl_fd = -1;
}
#ifdef DAEMON_PRESENT
if (my_obj->ds_fd >= 0) {
mm_camera_socket_close(my_obj->ds_fd);
my_obj->ds_fd = -1;
}
#endif
}
/* unlock cam_lock, we need release global intf_lock in camera_open(),
* in order not block operation of other Camera in dual camera use case.*/
pthread_mutex_unlock(&my_obj->cam_lock);
return rc;
}
到这里,终于看到了open的系统调用,HAL端也就是从这里进入内核,调用驱动来处理的,这里大家可以看到,是通过do/while循环来处理的,有一个重试机制,重试次数n_try不断的减小,当它等于0时,相机设备还未正常打开,就退出do/while循环了,它的初值为MM_CAMERA_DEV_OPEN_TRIES,该宏定义的值为20,在do判断中,只要if((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 ))条件中有一个成立,就跳出循环,(my_obj->ctrl_fd >= 0)的意思是就camera打开成功,返回的FD有效;(errno != EIO && errno != ETIMEDOUT)的意思是未出现IO或者超时错误;(n_try <= 0 )意思是重试次数已用完,打开成功后,还要进行一些其他初始化的操作。
到这里,openCamera才算完成了,大家可以看到,中间的过程真是复杂,当然我们所分析的部分还没有包含驱动部分,想要搞清楚整个逻辑,还是要花费很大的气力的,也希望我们搞技术的同事,能够认认真真的静下心来专心搞技术,以此来提升我们的能力。
好了,今天就到这里,休息一下!















 1815
1815











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









