







UN R79法规是针对转向装置的型式认证法规,涉及A/B1/C类的横向控制辅助驾驶功能,对各功能的功能边界、性能要求、状态提示、故障警示以及型式认证要提交的信息做了规范,本文结合百度文心一言对法规进行翻译,并结合个人理解对部分内容做了补充说明,如有不对欢迎指正。
第一部分在这里。
5. Construction provisions
5.1 一般规定
5.1.1. 转向系统应确保车辆在其最高设计速度下,或就挂车而言,在其技术上允许的最高速度下,能够轻松且安全地操控。当按照第6.2章节的规定,使用完好的转向设备进行测试时,转向系统应具有自动回正的趋势。对于机动车辆,车辆应满足第6.2章节的要求;对于挂车,车辆应满足第6.3章节的要求。如果车辆配备了辅助转向系统(
auxiliary steering system),则还应满足附件4的要求。配备液压转向传动装置的挂车还应符合附件5的规定。
5.1.2. 在车辆的最高设计速度下,车辆应能够在直线路段上行驶,而无需驾驶员进行异常的转向修正(unusual correction),且转向系统不应出现异常的振动;
5.1.3. 转向控制的操作方向应与车辆预期的方向变化相对应,且转向控制偏转与转向角(steering angle)之间应存在连续关系。这些要求不适用于配备自动指令(automatically commanded steering function)或修正转向功能(corrective steering function)的系统,也不适用于ASE(自动转向执行器)。
在车辆静止、以最高不超过15公里/小时的速度进行低速机动以及系统未通电的情况下,对于全动力转向,这些要求可能不一定适用。
5.1.4. 转向设备的设计、制造和安装应使其能够承受车辆或车辆组合在正常行驶过程中产生的应力。除非专门设计,否则转向传动装置的任何部分都不应限制最大转向角。除非另有规定,否则在本法规中,假定转向设备在任何时候最多只会出现一次故障,且一个转向架上的两个车轴应视为一个车轴。
5.1.5. 转向设备(包括电控线路)的有效性不应受到磁场或电场的不利影响。这应通过满足技术要求并遵守联合国第10号法规的过渡性规定来证明,具体适用如下:
(a) 对于没有为可充电电能储存系统(Rechargeable Electric Energy Storage System)充电的耦合系统的车辆,适用03系列修正案;
(b) 对于有为可充电电能储存系统(Rechargeable Electric Energy Storage System)充电的耦合系统的车辆,适用04系列修正案;
5.1.6 高级驾驶辅助转向系统(Advanced Driver Assistance Steering System)
只有在该功能不会导致基本转向系统性能下降的情况下,才能根据本法规获得认证。此外,这些系统应设计成驾驶员可以随时通过有意操作来override该功能;
5.1.6.1 CSF要求
CSF系统应满足附件6的要求;
5.1.6.1.1. 每次CSF系统介入时,应立即通过光学警告信号向驾驶员指示,该信号应至少显示1秒或持续至介入结束,以时间较长者为准;
当使用闪烁模式(flashing mode)时,应在介入结束时或之后显示一个照明阶段(lighting phase);
如果CSF系统的介入是由电子稳定性控制(ESC)或相关联合国法规(即联合国第13号、13-H号或140号法规)中规定的车辆稳定性功能所控制,那么只要介入存在,就可以使用指示ESC介入的ESC闪烁指示灯作为上述光学警告信号的替代。
5.1.6.1.2. 在基于车道标线或车道边界的存在和位置评估而进行的CSF干预的情况下,应额外适用以下规定:
5.1.6.1.2.1. 若干预时间超过:
(a) M1和N1类车辆为10秒,或
(b) M2、M3、N2和N3类车辆为30秒,
则应在干预结束前持续提供声学警告信号;
5.1.6.1.2.2. 若在180秒的滚动时间间隔(rolling interventions)内发生两次或两次以上连续干预,且在干预期间驾驶员未进行转向输入,则系统应在第二次及后续180秒滚动时间间隔内的任何干预期间提供声学警告信号;从第三次干预(及后续干预)开始,声学警告信号的持续时间应比前一次警告信号至少长10秒;
5.1.6.1.2.3. 对于配备了符合第130号法规技术要求的车道偏离警告系统(LDWS)的M2和M3类车辆,第5.1.6.1.2.1章节和第5.1.6.1.2.2章节中规定的声学警告信号可用触觉警告替代,但触觉警告不得仅通过方向盘传递;
5.1.6.1.3. override所需的转向控制力,在整个CSF介入过程内不应超过50N;
5.1.6.1.4. 对于依赖车道标线或车道边界的存在和位置评估的CSF,第5.1.6.1.1、5.1.6.1.2和5.1.6.1.3段中的要求,应按照本法规附件8中规定的相关车辆测试进行测试;
5.1.6.2 ESF要求
配备紧急转向辅助(ESF)的车辆应满足以下要求:
ESF系统应遵守附件6的要求;
5.1.6.2.1. 任何ESF系统都应在检测到碰撞风险时才启动干预;
5.1.6.2.2. 任何配备ESF的车辆都应具备环境感知(例如车道标线、道路边缘、其他道路使用者)的手段,且符合指定用例,这些手段应在ESF激活状态时监控驾驶环境。
5.1.6.2.3. 由ESF启动的自动避让操作不应导致车辆驶离道路;
5.1.6.2.3.1. 在一侧或两侧有车道标线的车道上发生ESF干预时,ESF自动避让操作不应导致车辆越过车道标线。然而,如果干预是在驾驶员进行变道或车辆无意中漂移到相邻车道时开始的,系统可以将车辆引导回其原始行驶车道。
5.1.6.2.3.2. 在车辆一侧或两侧没有车道标线的情况下,允许进行一次ESF干预,前提是它不会在车道标线缺失的方向上使车辆产生大于0.75米的横向偏移。自动避让操作期间的横向偏移应通过使用车辆在ESF干预开始和结束时前部的固定点来确定。
5.1.6.2.4. ESF干预不应导致车辆与其他道路使用者发生碰撞;(在达成统一的测试程序之前,制造商应向技术服务机构提供文件和支持证据,以证明其符合本规定;这些信息应由技术服务机构和车辆制造商进行讨论并达成一致)
5.1.6.2.5. 在型号认证期间,制造商应向技术服务机构证明,车辆上安装了哪些用于监控驾驶环境的装置,以满足上述5.1.6.2各章节的规定;
5.1.6.2.6. 任何ESF干预都应以光学信号以及声学或触觉警告信号向驾驶员指示,该信号应最迟在ESF干预开始时提供,并在干预持续期间保持;
其他警告系统(如盲点检测、车道偏离警告、前方碰撞警告)使用的信号被视为足以满足上述各自的光学、声学或触觉信号要求;
5.1.6.2.7. 系统故障应通过光学警告信号向驾驶员指示;然而,当系统被手动停用时,故障模式的指示可以被抑制;
5.1.6.2.8. Override所需的转向控制力不应超过50N;
5.1.6.2.9. 车辆应按照本法规附件8中规定的相关车辆测试进行测试;
5.1.6.2.10. 系统信息数据
在型号认证时,应随本法规附件6中要求的文件包一并向技术服务机构提供以下数据:
(a) ESF设计用于运行的使用场景(在2.3.4.3段中ESF定义所规定的使用场景a i、a ii、a iii和b中),
(b) 系统激活的条件,例如车辆速度范围
V
s
m
a
x
V_{smax}
Vsmax,
V
s
m
i
n
V_{smin}
Vsmin,
© ESF如何检测碰撞风险,
(d) 检测驾驶环境的手段描述,
(e) 如何停用/重新激活该功能,
(f) 如何确保Override的力不超过50N的限制;
5.1.6.3 RMF要求
配备RMF的车辆应满足以下要求:
RMF系统应遵守附件6的要求;
5.1.6.3.1. 任何RMF系统仅在以下情况下启动干预:
(a) 直接(例如通过驾驶员监控系统)或间接(例如对警告长时间无反应、无法控制车辆)评估认为驾驶员无反应;或
(b) RMF系统被手动激活;
如果系统提供了手动激活的方式,那么这种方式应防止误操作,并且驾驶员和驾驶员旁边的乘客都能触及;
5.1.6.3.2. 除非已经发出请求(例如hands-on warning)或系统已被手动激活,否则在每次RMF干预之前,都应发出光学警告信号,并额外发出声学和/或触觉警告信号(例如刹车抖动),以促使(simulate)驾驶员重新控制车辆;
此警告阶段应在RMF开始干预前至少5秒开始,除非需要系统更早地控制车辆以防止车辆越过车道标线或与其他车辆保持适当距离;
每次RMF干预都应通过光学警告信号,并额外通过声学和/或触觉警告信号(例如刹车抖动)向驾驶员指示,只要干预持续存在,这些警告信号就应持续;
这些警告信号应明显且极具紧迫性;
5.1.6.3.3. RMF干预不应不合理地停用或抑制已激活的辅助系统(例如自动紧急制动系统AEBS)的功能;
5.1.6.3.4. 激活危险警告灯的信号应在干预开始时生成;
5.1.6.3.5. 驾驶员应能随时通过明确的操作来Override RMF功能;
RMF应实施策略,以防止无意识的通过驾驶控制输入(例如,要求加速踏板或制动踏板单次输入有显著变化,或多次输入以取消RMF)而意外被Override;
这些策略应在型号认证时向技术服务机构展示;
5.1.6.3.6. 在RMF干预期间,车辆应减速,减速度需求不超过4m/s²,除非周围交通情况要求(例如,前方车辆减速);
也允许在极短时间内使用更高的减速度需求值,例如作为触觉警告以促使驾驶员重新控制车辆;
5.1.6.3.7. 一旦RMF将车辆安全停放在目标停车区域内,车辆在未经手动输入的情况下不应移动;
5.1.6.3.8. 如果RMF系统检测到任何妨碍其进行干预的故障,应向驾驶员发出信号;
5.1.6.3.9. 关于使车辆在其行驶车道外安全停车的系统的附加规定:
5.1.6.3.9.1. 只有当车辆配备有前、侧、后方的检测能力时,RMF才允许变道;
5.1.6.3.9.2. 变道程序应仅以无风险方式(uncritical way)执行,如第5.1.6.3.9.7和第5.1.6.3.9.8章节所述;如果无法以无风险方式到达目标停车区域,RMF应在车辆停车时尽量使车辆保持在当前行驶车道内;
5.1.6.3.9.3. 在启动变道程序之前,RMF应(如认为适当)降低车辆速度,以最小化与该变道相关的风险(例如,使车辆速度适应目标车道内其他车辆的速度);
变道程序不应在RMF干预开始后的前5秒内启动;
5.1.6.3.9.4. 在干预期间,系统可在常规车道和/或硬路肩上执行一次或多次变道;只有变道可被认为能最小化车辆乘员和其他道路使用者的安全风险时,才可进行变道;
5.1.6.3.9.5. 干预期间的变道应仅在系统对其前、侧、后方的周围环境(如第5.1.6.3.9.17章节所定义)有足够信息,以评估该变道的风险时执行;
5.1.6.3.9.6. 干预期间的变道不应朝向用于相反方向交通的车道执行;
5.1.6.3.9.7. 干预期间,在变道时,不应导致车辆与预测路径上的其他车辆或道路使用者发生碰撞;
5.1.6.3.9.8. 变道程序对其他道路使用者来说应是可预测且易于应对的;
5.1.6.3.9.8.1. 在变道操作期间,RMF应尽量避免产生超过1 m/s²的横向加速度,此加速度为除车道曲率产生的横向加速度之外的额外加速度;
5.1.6.3.9.8.2. 只有在目标车道上的车辆不会因本车的变道而被迫进行无法控制的减速时,才可开始变道操作;
5.1.6.3.9.8.2.1. 在变道操作期间,RMF应尽量避免使后方驶近车辆产生超过3.7 m/s²的纵向减速度;
5.1.6.3.9.8.2.2. 只有在相邻车道上有足够空间供后方跟随或驶近车辆通过时,才可开始变道操作;
5.1.6.3.9.8.2.3. 如果RMF在变道过程中使车辆减速,在评估与后方驶近车辆的距离时,应考虑这一减速度,且该减速度应对后方驶近车辆而言是可控的;
5.1.6.3.9.8.2.4. 如果在变道操作结束时,后方车辆没有足够的时距时,则在变道操作完成后的一定时间内,RMF不应增加减速度,除非是为了避免或减轻即将发生的碰撞风险;
5.1.6.3.9.8.2.5. 在型号认证期间,应向技术服务机构展示第5.1.6.3.9.8.2章节的规定如何在系统设计中实现;
5.1.6.3.9.9. 变道操作应为一次连续的运动;
5.1.6.3.9.10. 干预期间的变道操作应毫不拖延地完成;
5.1.6.3.9.11. 只有在预计变道操作能在车辆停稳之前完成时才可开始变道操作;
5.1.6.3.9.12. 关于将车辆安全停靠在路边的变道操作的系统行为的附加规定:
5.1.6.3.9.12.1. 除5.1.6.3.9.11、5.1.6.3.9.13、5.1.6.3.9.14和5.1.6.3.9.16外,5.1.6.3.9的所有规定均适用;
5.1.6.3.9.12.2. 车辆可在路边的车道标线上停稳;
5.1.6.3.9.12.3. 除第5.1.6.3.9.7的规定外,可向其他道路使用者发出声学警告,除非该国的交通规则禁止使用声学警告;
5.1.6.3.9.12.4. 当将车辆停靠在路边时,车辆速度不得超过10 km/h;
5.1.6.3.9.13. 干预期间的变道操作应提前通过激活相应的转向指示灯(而非危险警告灯)向其他道路使用者指示;
5.1.6.3.9.14. 变道操作完成后,应及时关闭转向指示灯,并重新激活危险警告灯;
5.1.6.3.9.15. (保留);
5.1.6.3.9.16. 尽管有第5.1.6.3.9.14的规定,但当作为RMF干预的一部分执行多次连续变道时,转向指示灯可在这些变道过程中保持激活状态,确保后续交通能将每次变道操作视为单独的操作;
5.1.6.3.9.16. 如果车辆具备在RMF干预期间执行变道的能力,制造商应声明车辆前、侧、后方的检测范围;声明的范围应足以评估车辆向左或向右变道不会在变道过程中与其他车辆或道路使用者发生危险情况;
技术服务机构应评估声明的检测范围与变道策略的一致性,并验证车辆在附件8的相关测试中其传感系统能够检测到其他车辆,这些范围应等于或大于声明的范围。
5.1.6.3.10. 当RMF使车辆停稳后驾驶员仍无响应时,系统应实施策略以引起外界对紧急情况的注意(例如,触发紧急呼叫、激活喇叭、保持危险警告灯开启);
5.1.6.3.11. M2/M3车辆的特殊规定
5.1.6.3.11.1. 如果系统提供乘客手动激活的方式,RMF系统应在激活RMF时向该乘客提供指示。此指示应持续到RMF干预开始或驾驶员override激活操作为止。驾驶员应能够override乘客的请求,以抑制RMF;
5.1.6.3.11.2. 安装在《车辆制造综合决议》(R.E.3)中定义的I、II或A类车辆上的RMF应在干预开始前向乘客提供声学和光学指示;
5.1.6.3.12 系统信息数据
在型式认证时,应向技术服务机构提供以下数据以及本法规附件6中要求的文件包:
(a)关于系统如何确认驾驶员无响应的信息;
(b)关于系统是否具备变道的能力以及系统如何判定目标停车区域的信息;
(c)检测驾驶环境的方法说明;
(d) 关于系统设计规范中能支持的道路类型(如高速公路、乡村道路、城市地区等)以及如何确保对这些系统规 范;
(e) Override的手段以及系统如何防止误Override;
(f)驾驶员警告和信息概念的描述,包括RMF干预之前和期间的警告;
(g)在具备变道能力的情况下:
(i)为确保安全而实施的设计规范的详细说明;
(ii)车辆检测其他道路使用者、障碍物和目标停车区域的方法;
(iii)系统如何选择适当的目标停车区的说明,以及该选择所依据的安全标准的说明;
(h)关于系统在不同交通环境(高速公路、城市等)下运行的最大速度的信息/规范,以及关于如何降低速度(例 如适应周围交通;不进行危及其他道路使用者的剧烈制动)以实现安全停车的信息/规范;
5.1.7. 牵引车应符合附件7的相关要求;
5.1.8. 转向传递装置
5.1.8.1. 转向几何结构的调节装置应能确保调节后,通过适当的锁定装置可在可调节部件之间建立牢固连接;
5.1.8.2. 可断开以适应车辆不同配置(如伸缩式半挂车)的转向传动装置,应配备锁定装置,以确保部件能准确复位;若锁定为自动锁定,则应配备额外的手动安全锁;
5.1.9. 转向轮
转向轮不应仅为后轮。此要求不适用于半挂车。
5.1.10. 能量供应
转向设备和其他系统可使用同一能量供应。但是,若共用同一能量供应的任何系统出现故障,则应按照第5.3段的相关故障条件确保转向功能;
5.1.11. 控制系统
对于能提供转向控制传递或做为转向控制传递一部分的电子车辆控制系统,其安全要求应遵循附件6的要求。然而,利用转向系统实现更高层次目标的系统或功能,仅在其对转向系统产生直接影响时,才受附件6的约束。若提供此类系统,则在转向系统型式认证测试期间,不得将其停用。
5.2 对拖车/挂车(Trailers)的要求
5.2.1. 具有多于一个带转向轮的车轴的挂车(半挂车和中心轴挂车除外)和至少有一个带转向轮的车轴的半挂车和中心轴挂车应满足第6.3段中给出的条件。 然而,对于带有自跟踪转向设备的拖车,应按照第6.3进行测试。 如果非转向轴和自循迹轴之间的轴载荷比等于或超过1.6,则不需要。
然而,对于带有自跟踪转向设备的拖车,在所有负载条件下,非转向或铰接转向轴与摩擦转向轴之间的轴负载比应至少为1。
5.2.2. 如果车辆组合中的牵引车正向前行驶,则挂车和牵引车应保持对齐。 如果对齐没有自动保持,拖车应配备合适的调整设施进行维护。
5.3 故障条款和性能
5.3.1 概述
5.3.1.1. 在本法规中,转向轮、转向控制装置和转向传动装置的所有机械部件,如果尺寸足够大,易于维护,并且具有至少与车辆其他基本部件(如制动系统)规定的安全特性,则不应被视为容易损坏。 如果任何此类部件的故障可能导致车辆失控,则该部件应由金属或具有同等特性的材料制成,并且在转向系统的正常操作中不应发生重大变形。
5.3.1.2. 只要车辆能够以要求的速度行驶,转向设备有故障时也应满足第5.1.2、5.1.3和6.2.1章节的要求;
在这种情况下, 当车辆静止时,第5.1.3章节不适用于全动力转向系统(full power steering systems);
5.3.1.3. 除纯机械故障外,任何传递故障都应按照第5.4章节的规定,明确提请车辆驾驶员注意。 当发生故障时,如果没有超过第6.2.6章节中给出的转向力(steering effort),则允许平均转向比发生变化;
5.3.1.4. 如果车辆的制动系统与转向系统共享相同的能源(energy source),并且该能源发生故障,则转向系统应具有优先权,并且应能够满足第5.3.2章节和5.3.3章节(如适用)的要求。In addition the braking performance on the first subsequent application, shall not drop below the prescribed service brake performance, as given in paragraph 2 of Annex 3 to this Regulation.
5.3.1.5. 如果车辆的制动系统与转向系统共享相同的能量供应(energy supply),并且能量供应出现故障,则转向系统应具有优先权,并应能够满足第5.3.2章节和5.3.3章节(如适用)的要求。 In addition the braking performance on the first subsequent application, shall not drop below the prescribed service brake performance, as given in paragraph 3 of Annex 3 to this Regulation.
5.3.1.6. 对于第5.3.1.4和5.3.1.5章节中对刹车性能的要求, 如果制动系统在没有任何能量储备的情况下,通过行车制动控制可以实现以下所述的辅助制动系统的安全要求,则上述规定不适用:
(a) 联合国第13-H号条例第2.2章节,附件3(适用于M1和N1类车辆);
(b)联合国第13号条例第2.2章节,附件4(适用于M2、M3和N类车辆);
5.3.1.7. 对于拖车,转向系统故障时应满足5.2.2和6.3.4.1的要求;
5.3.2 Power assisted steering systems
5.3.2.1. 该系统应设计为:当出现任何需要启动 5.4.2.1.1 章节中所提及警示信号的故障时,车辆无法无限期地以超过 10 公里/小时的速度行驶;
5.3.3 Full power steering systems
5.3.2.1. 该系统应设计为:当出现任何需要启动 5.4.2.1.1 章节中所提及警示信号的故障时,车辆无法无限期地以超过 10 公里/小时的速度行驶;
5.3.3.2. 若控制传递系统内出现故障(5.1.4 章节所列部件除外),仍应能够按照第 6 章节针对完好转向系统所规定的性能要求进行转向操作;
5.3.3.3. 若控制传递系统的能源(energy source)出现故障,应仍能完成至少 24 次“八字形”机动操作,其中“八字形”的每个环圈直径为 40 米,操作速度为 10 公里/小时,且转向性能需达到第 6 章节针对完好系统所规定的水平;
测试机动操作应在第 5.3.3.5 章节所规定的能量储存水平下开始进行;
5.3.3.4. 若能量传输系统(energy transmission)内出现故障(5.3.1.1 章节所列部件除外),转向角不应立即发生任何变化;只要车辆能够以超过 10 公里/小时的速度行驶,在以至少 10 公里/小时的最低速度完成至少 25 次“八字形”机动操作(其中“八字形”的每个环圈直径为 40 米)后,发生故障的系统应满足第 6章节所规定的要求;
测试机动操作应在第 5.3.3.5 条款所规定的能量储存水平下开始进行;
5.3.3.5. 用于第 5.3.3.3 条和第 5.3.3.4 章节所述测试的能量水平,应为向驾驶员指示出现故障时的能量储存水平;
对于需遵循附件 6 规定的电动系统而言,该能量水平应采用制造商在提交的与附件 6 相关的文件中所述的最不利工况情况,且应考虑温度、老化等因素对电池性能产生的影响;
5.4 警示信号(warning signals)
5.4.1 概览
5.4.1.1. 任何影响转向功能且非机械性质的故障,均应清晰地向车辆驾驶员发出信号;尽管有第 5.1.2 章节的要求,但可通过在转向系统中刻意引入振动,以此作为该系统出现故障状况的附加警示方式;
对于机动车而言,转向力增大可视为一种警示信号;对于挂车而言,则允许使用机械指示器;
5.4.1.2. 光学警示信号应具备可见性,即使在白天也能清晰可见,并且应与其他警示信息加以区分;驾驶员应能够从驾驶座上便捷地验证这些信号是否处于正常状态;若警示装置的某个部件发生故障,不应导致转向系统性能出现任何损失;
5.4.1.3. 声学警示信号应采用连续音或间歇音信号,或者通过语音信息进行提示;若采用语音信息,制造商应确保警示内容使用车辆销售目标市场的语言(或多种语言);
声学警示信号应易于被驾驶员识别;
5.4.1.4. 若转向系统与其他系统共用同一能源,当能源/储存装置(如蓄能器或储液罐)中储存的能量/流体降至可能导致转向操作力增大的水平时,应向驾驶员发出声学或光学警示信号;若制动系统也使用同一能源,则该警示信号可与用于提示制动系统故障的装置相结合;驾驶员应能够从驾驶座上便捷地验证警示装置是否处于正常状态;
5.4.2 全动力转向设备(Full power steering equipment)的特殊规定
5.4.2.1. 车辆应能够提供转向系统故障及缺陷警示信号,具体如下:
5.4.2.1.1. 一个红色警示信号,用于指示主转向设备中第 5.3.1.3 所定义的故障;
5.4.2.1.2. 在适用的情况下,一个黄色警示信号,用于指示红色警示信号未涵盖的、通过电气检测发现的转向设备故障;
5.4.2.1.3. 若使用符号,则该符号应符合 ISO 2575:2000 中定义的符号 J 04(ISO/IEC 注册编号 7000-2441);
5.4.2.1.4. 上述警示信号应在车辆(及转向系统)电气设备通电时点亮。在车辆静止状态下,转向系统应在熄灭信号前验证不存在任何规定的故障或缺陷。
对于应触发上述警示信号但在静态条件下无法检测到的特定故障或缺陷,应在检测到时予以存储,并在车辆启动时以及点火(启动)开关处于“开启”(运行)位置的所有时间内显示,直至故障消除。
5.4.3. 当附加转向设备(additional steering equipment)处于运行状态,且/或由该设备产生的转向角未恢复至正常行驶位置时,应向驾驶员发出警示信号;
5.5 转向设备定期技术检验规定
5.5.1. 在切实可行且经车辆制造商与型式认证机构协商一致的前提下,转向设备及其安装方式应设计为:无需拆卸即可通过必要情况下常用的测量仪器、方法或试验设备检查其运行状态;
5.5.2. 应能够以简单方式验证控制转向功能的电子系统的正确运行状态,若需特殊信息,应免费提供;
5.5.2.1. 在型式认证时,制造商应保密说明为防止未经授权擅自修改所选择的验证手段(如警示信号)运行状态而采取的保护措施;
或者当存在备用手段可检查正确运行状态时,可视为满足此保护要求;
5.6 关于ACSF的规定
ACSF应符合附件6的要求;
5.6.1 A类ACSF的特殊规定
任何A类ACSF均应满足以下要求。
5.6.1.1 一般要求
5.6.1.1.1. 系统仅应在车速不超过10 km/h(允许±2 km/h的公差)时运行;
5.6.1.1.2. 系统仅应在驾驶员主动操作(应指的是需要驾驶员主动激活)且系统运行条件满足时启动(所有相关功能——例如制动器、加速踏板、转向系统、摄像头/雷达/激光雷达——均应正常工作);
5.6.1.1.3. 驾驶员应能随时停用系统;
5.6.1.1.4. 若系统包含对车辆的加速和/或制动控制,则车辆应配备检测车辆运行区域内障碍物(例如车辆、行人)的手段,并能够刹停车辆以避免碰撞;
5.6.1.1.5. 系统启动时,应向驾驶员发出指示;任何控制终止时,应通过光学警告信号产生短暂但明显的驾驶员警告,并同时通过声音警告信号或触觉警告信号(泊车中的转向控制信号除外)发出警告;
对于远程控制泊车(RCP),上述驾驶员警告要求应至少在远程控制装置上提供光学警告信号予以满足;
5.6.1.2 RCP特殊要求
5.6.1.2.1. 泊车操作应由驾驶员发起,但由系统控制;不得通过远程控制装置直接干预转向角度、加速或减速值;
5.6.1.2.2. 在泊车操作过程中,驾驶员需持续操作远程控制装置;
5.6.1.2.3. 若驾驶员持续操作中断,或车辆与远程控制装置之间的距离超过规定的远程控制泊车(RCP)最大操作范围
S
R
C
P
m
a
x
S_{RCPmax}
SRCPmax,或远程控制与车辆之间的信号丢失,车辆应立即停止;
5.6.1.2.4. 若在泊车操作过程中车辆的车门或行李箱盖被打开,车辆应立即停止;
5.6.1.2.5. 若车辆已自动到达最终泊车位置,或经驾驶员确认到达,且启动/运行(start/run)开关处于off位置,则泊车制动系统应自动启动;
5.6.1.2.6. 在泊车操作过程中,若车辆在任何时间静止,远程控制泊车(RCP)功能应防止车辆溜车;
5.6.1.2.7. 规定的远程控制泊车(RCP)最大操作范围不得超过6米;
5.6.1.2.8. 系统应设计为能够防止远程控制泊车(RCP)系统被未经授权激活或操作,以及防止对系统进行非法干预;
5.6.1.3 系统信息数据
5.6.1.3.1. 在型式认证时,应向技术服务机构提供以下数据,并随附本法规附件6要求的文件包一并提交:
5.6.1.3.1.1. 规定的RCP最大操作范围
S
R
C
P
m
a
x
S_{RCPmax}
SRCPmax的数值;
5.6.1.3.1.2. 系统可被激活的条件,即系统运行条件满足时的情形;
5.6.1.3.1.3. 对于RCP系统,制造商应向技术主管部门说明系统如何防止未经授权的激活;
5.6.2 B1类ACSF的特殊规定
5.6.2.1 一般要求
5.6.2.1.1. 在边界条件范围内,已激活的系统应始终确保车辆在横向加速度低于制造商规定的最大横向加速度
a
y
s
m
a
x
ay_{smax}
aysmax时,不会越过车道标线;
需明确的是,车辆制造商规定的最大横向加速度
a
y
s
m
a
x
ay_{smax}
aysmax可能并非在所有条件下均可达到(例如,恶劣天气、车辆安装不同轮胎、横向倾斜路面),在这些条件下,系统不应停用或不合理地切换控制策略;
系统允许超过规定的
a
y
s
m
a
x
ay_{smax}
aysmax值,但不得超过0.3 m/s²,同时不得超过本法规第5.6.2.1.3表格中规定的最大值;
尽管有上述规定,但在不超过2秒的时间段内,系统的横向加速度可超过规定的
a
y
s
m
a
x
ay_{smax}
aysmax值,但不得超过40%,同时不得超过本法规第5.6.2.1.3表格中规定的最大值0.3 m/s²以上;
5.6.2.1.2. 车辆应配备驾驶员激活(standby mode)和停用(off mode)系统的手段;驾驶员应能通过单一操作随时停用系统;停用后,系统应仅在驾驶员主动操作后再次激活;
5.6.2.1.3. 系统设计应抑制转向控制的过度干预,以确保驾驶员的转向操作性,并避免车辆在运行过程中出现意外行为。为此,应满足以下要求:
(a) 驾驶员为override系统提供的方向控制所需的转向控制力不得超过50 N;
(b) 规定的最大侧向加速度
a
y
s
m
a
x
ay_{smax}
aysmax应在下表定义的范围内:
对于M1、N1车型:
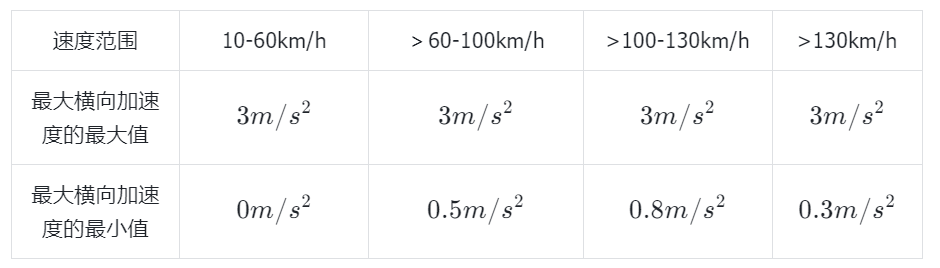
对于M2、M3、N2、N3车型:
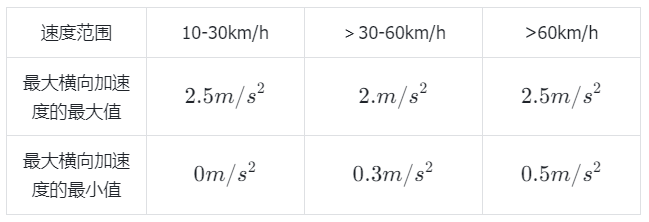
(c)系统所产生的横向jerk(加速度的变化率)在半秒时间内的变化平均值(Moving average)不得超过5 m/s³;
5.6.2.1.4. 本法规第5.6.2.1.1章节和第5.6.2.1.3章节中的要求,应按照本法规附件8中规定的相关车辆试验(或试验方法)进行测试;
5.6.2.2 ACSF B1操作(operation)
5.6.2.2.1. 若系统处于激活(active)状态,应向驾驶员提供光学信号;
5.6.2.2.2. 当系统处于待机模式(standby)时,应向驾驶员提供光学信号;
5.6.2.2.3. 当系统达到本法规第5.6.2.3.1.1章节中规定的边界条件(例如,最大横向加速度
a
y
s
m
a
x
ay_{smax}
aysmax)时,在驾驶员未对转向控制装置进行任何操作,且车辆任一前轮开始跨越车道标线的情况下,系统应继续提供辅助,并通过光学警告信号,以及附加的声学或触觉警告信号,清晰地向驾驶员通报此系统状态;
对于M2、M3、N2和N3类车辆,若车辆配备了符合UN130法规技术要求的车道偏离警告系统(LDWS),则视为满足上述警告要求;
5.6.2.2.4. 系统发生故障时,应通过光学警告信号向驾驶员发出提示。然而,若系统由驾驶员手动关闭,则可不必显示故障提示;
5.6.2.2.5. 当系统处于激活状态,且车速处于10 km/h或
V
s
m
i
n
V_{smin}
Vsmin(以较高者为准)与
V
s
m
a
x
V_{smax}
Vsmax之间时,系统应具备检测驾驶员是否握住转向控制装置的功能;
若驾驶员在不超过15秒的时间内未握住转向控制装置,则应提供光学警告信号;该信号可与本章节后续规定中提及的信号相同;
光学警告信号应指示驾驶员将手放在转向控制装置上; 它应包含显示手和转向控制的图形信息,并可能附有额外的解释性文本或警告符号 - 如下图所示:

如果在不超过30秒的时间内驾驶员没有握住转向控制装置,作为光学警告信号提供的图片信息中的手或转向控制装置应显示为红色,并且应提供声音警告信号;
警告信号应一直处于激活状态,直到驾驶员握住转向控制装置,或直到系统手动或自动停用;
该系统应在声学警告信号启动后最迟30秒内自动停用; 停用后,系统应通过不同于先前声音警告信号的声音紧急信号,至少持续五秒或直到驾驶员再次握住转向控制装置,明确告知驾驶员系统状态;
上述要求应按照本法规附件8中规定的相关车辆试验进行测试;
5.6.2.2.6. 除非另有规定,否则第5.6.2.2章节中描述的光学警告信号。 应彼此不同(例如不同的符号、颜色、闪烁、文本);
5.6.2.3 系统信息数据
5.6.2.3.1. 在型式认证时,应将以下数据与本法规附件6中要求的文件包一起提供给技术服务部门;
5.6.2.3.1.1. 系统可激活的条件和操作边界(边界条件), 车辆制造商应提供第5.6.2.1.3表格中提到的每个速度范围的
V
s
m
a
x
V_{smax}
Vsmax、
V
s
m
i
n
V_{smin}
Vsmin和
a
y
s
m
a
x
ay_{smax}
aysmax值;
5.6.2.3.1.2. 关于系统如何检测驾驶员是否握持转向控制器的信息;
5.6.2.3.1.3. 关于除车道标记以外的输入信息(例如道路边界、基础设施分隔、周围交通、地图数据),系统使用这些信息来可靠地确定车道的路线;
5.6.3 (Reserved for ACSF of Category B2)
5.6.4 C类ACSF的特殊规定
5.6.4.1 一般要求
5.6.4.1.1. 装有C类ACSF的车辆还应装有符合本法规要求的B1类ACSF;
5.6.4.1.2. 当C类ACSF处于待机模式(standby)时,B1类ACSF应将车辆对准车道中心,除非由于实际情况或驾驶员输入(例如当另一辆车紧靠行驶时)而认为车道中的不同位置是合理的;
车辆制造商应在型式认证期间向技术服务机构证明这一点;
5.6.4.2 C类系统的ACSF的激活/退出
5.6.4.2.1. 在每个新的发动机启动/运行循环开始时,系统的默认状态应为关闭;
当自动执行新的发动机启动/运行循环时(例如自动启停系统的操作),此要求不适用。
5.6.4.2.2. 车辆应配备有驾驶员激活(standby)和停用(off)系统的装置; 可以使用与B1类ACSF相同的装置;
5.6.4.2.3. 该系统只有在驾驶员有意的操作后才能激活(standby);
只能在禁止行人和骑自行车者的道路上启动,并且这些道路的设计应配备物理隔离,将相反方向的交通分开,并且在车辆行驶的方向上至少有两个车道; 应通过使用至少两种独立手段来确保这些条件;
如果从允许C类ACSF的道路类型过渡到不允许C类ACSF的道路类型,系统应自动停用(off),除非行驶方向上缺少第二条车道是上述唯一未满足的条件(例如两条高速公路之间的连接器);
5.6.4.2.4. 驾驶员应能随时通过一个动作关闭系统(off),在此操作之后,系统只能通过驾驶员有意的操作重新激活(standby);
5.6.4.2.5. 尽管有上述要求,仍可在试验跑道上执行本法规附件8中的相应试验;
5.6.4.3 override
驾驶员的转向输入应优先于系统的转向动作;
Override所需的转向控制力不应超过50 N;
只要在Override期间优先考虑驾驶员,系统就可以保持激活状态。
5.6.4.4 横向加速度
车道变换操纵期间系统引起的横向加速度:
(a)除了车道曲率产生的横向加速度外,不应超过1 m/s²,以及
(b)不得使车辆总横向加速度超过第5.6.2.1.3表格中所示的最大值;
系统产生的半秒横向jerk变化平均值(moving average)不得超过5 m/s³;
5.6.4.5 HMI
5.6.4.5.1. 除非另有规定,否则第5.6.4.5章节中确定的光学警告信号应易于相互区分(例如不同的符号、颜色、闪烁、文字);
5.6.4.5.2. 当系统处于待机模式(standby)时,应向驾驶员提供光学信号;
5.6.4.5.3. 当变道程序(Lane change procedure)正在进行时,应向驾驶员提供光学信号;
5.6.4.5.4. 当变道程序(Lane change procedure)被抑制时,根据第5.6.4.6.8章节,系统应通过光学警告信号以及额外的声音或触觉警告信号,明确告知驾驶员该系统的状态, 如果抑制是由驾驶员启动的,那么光学警告就足够了;
5.6.4.5.5. 应通过光学警告信号立即向驾驶员发出系统故障信号。 然而,当驾驶员手动停用系统时,故障模式的指示可能会被抑制。
如果在变道操作(Lane change manoeuvre)中发生系统故障,应通过光学和声学或触觉警告向驾驶员发出故障信号。
5.6.4.5.6. 系统应提供检测驾驶员是否握有转向控制装置的方法,并应根据以下警告策略警告驾驶员:
如果在变道程序(Lane change procedure)启动后不超过3秒的时间内,并且在变道操作(Lane change manoeuvre)开始之前,驾驶员没有握住转向控制装置,则应提供光学警告信号。 该信号应与第5.6.2.2.5段中规定的信号相同。
警告信号应一直处于激活状态,直到驾驶员握住转向控制装置,或直到系统根据5.6.4.6.8手动或自动停用。
5.6.4.6 变道程序(Lane change procedure)
5.6.4.6.1. 仅当B1类自动控制转向功能(ACSF)已处于激活状态时,方可启动C类ACSF的变道程序;
5.6.4.6.2. 变道程序需以驾驶员手动激活目标侧转向指示灯为前提条件,且应在激活后立即启动;
5.6.4.6.3. 当变道程序启动时,B1类ACSF应暂停运行,由C类ACSF接管B1类ACSF的车道保持功能,直至变道操作开始执行;
5.6.4.6.4. 车辆向目标车道的横向移动不得早于变道程序启动后1.0秒开始。此外,靠近车道标线的横向移动与完成变道所需的横向移动应连贯执行,不得中断。
变道操作可通过自动触发或驾驶员第二次明确操作启动,但车辆不得同时配备上述两种启动方式。
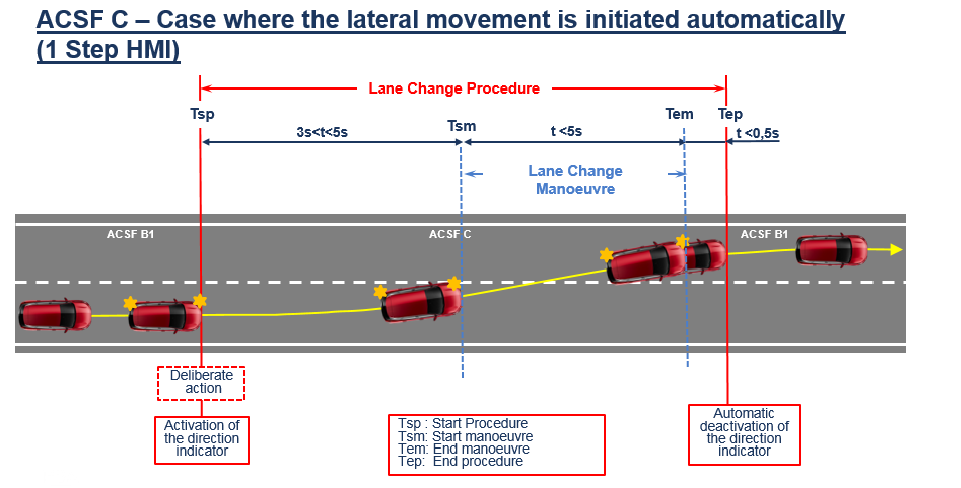
5.6.4.6.4.1. 变道操作(Lane change manoeuvre)的自动启动
在自动启动的情况下,变道操作应在按照第5.6.4.6.2段所述手动激活变道程序后的3.0秒至5.0秒之间开始,如下图所示:
5.6.4.6.4.2. 通过二次有意操作启动变道操作(Lane change manoeuvre)
若通过二次有意操作来启动变道操作,则该操作应在按照第5.6.4.6.2段所述手动激活程序后的3.0秒至7.0秒之间开始。
此外,变道操作最迟应在二次有意操作后的3.0秒内开始,如下图所示:
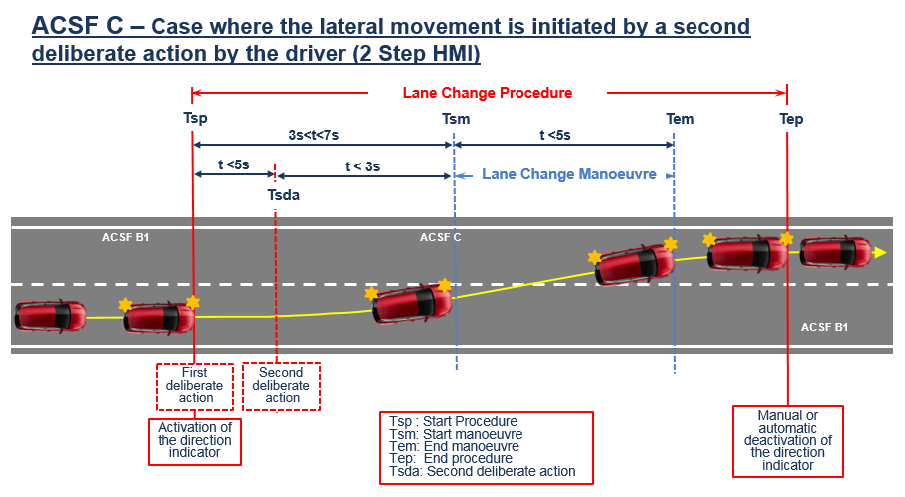
用于执行二次有意操作的控制装置应位于转向控制区域;
5.6.4.6.5. 变道操作应在以下时间内完成:
(a) 对于M1、N1类车辆,不超过5秒;
(b) 对于M2、M3、N2、N3类车辆,不超过10秒;
5.6.4.6.6. 一旦变道操作完成,B1类ACSF的车道保持功能应自动恢复;
5.6.4.6.7. 方向指示灯应在整个车道变换操纵期间保持激活状态,并应在如上文第5.6.4.6.6段所述B1类ACSF车道保持功能恢复后不迟于0.5秒由系统自动关闭;仅当变道操作是自动启动的,且在变道操作期间方向指示灯控制装置未完全接合(latched position)时,才需要系统自动关闭方向指示灯。
ps:latched position(锁定位置):在大多数汽车中,方向指示灯控制杆通常有三个位置:中间位置(关闭)、向上位置(右转向灯激活)和向下位置(左转向灯激活)。当驾驶员将控制杆推到向上或向下位置时,控制杆会“锁定”在那里,直到驾驶员手动将其推回中间位置或进行其他操作来释放它;
目前很多车其实有两种拨动转向灯拨杆的方式:重拨和轻拨:
当使用较重的力去拨动转向灯拨杆时,会感受到一个阻滞以及“咔”的一下,此时当车辆完成变道后,需要再手动将拨杆拨回去;
当使用较轻的力轻拨一下转向灯拨杆,此时当车辆完成变道后,转向灯会自行关闭,不再需要手动回正;
目前小鹏G9和P7i车型使用了电子转向灯拨杆,其没有机械限位,在使用完打灯变道之后会自动回正,转向灯会自行关闭;
5.6.4.6.8. 变道程序抑制
5.6.4.6.8.1. 当在变道操作开始前出现以下至少一种情况时,系统应自动抑制变道程序:
(a) 系统检测到紧急情况(如5.6.4.7所定义),
(b) 驾驶员接管或关闭系统,
© 系统达到其工作边界(例如,无法再检测到车道标线),
(d) 系统检测变道操作开始时驾驶员未握住转向控制装置,
(e) 驾驶员手动关闭了方向指示灯;
(f) 在驾驶员采取5.6.4.6.2段所述的有意操作以启动变道程序后,变道操作未在特定时间内开始:
(i) 在自动启动的情况下,最迟不超过5.0秒,
(ii) 在通过二次有意操作启动的情况下,最迟不超过7.0秒,
(iii) 在通过二次有意操作启动的情况下,最迟应在二次有意操作后的 3.0 秒内开始;
(g) 在通过二次有意操作启动变道操作时,系统未在变道程序开始后的5.0秒内检测到第二次有意操作;
(h) 5.6.4.6.4中所述的横向移动不连续;
5.6.4.6.8.2. 使用手动方式手动关闭车道变换程序,
5.6.4.6.8.2. 驾驶员应能随时通过手动控制方向指示灯来手动关闭变道程序。
5.6.4.7 紧急情况
当在变道操作开始时,目标车道上有驶来的车辆,若该车辆在变道操作开始后0.4秒需要以超过3米/秒²的减速度进行减速,才能确保两车之间的距离始终不小于自车在1秒内行驶的距离,则这种情况被视为紧急情况。
变道操作开始时产生的紧急距离应使用以下公式进行计算:
S
c
r
i
t
i
c
a
l
=
(
v
r
e
a
r
−
v
A
C
S
F
)
∗
t
B
+
(
v
r
e
a
r
−
v
A
C
S
F
)
2
/
(
2
∗
a
)
+
v
A
C
S
F
∗
t
G
S_{critical}=(v_{rear}-v_{ACSF})*t_B+(v_{rear}-v_{ACSF})^2/(2*a)+v_{ACSF}*t_G
Scritical=(vrear−vACSF)∗tB+(vrear−vACSF)2/(2∗a)+vACSF∗tG
v
r
e
a
r
v_{rear}
vrear:目标车道上驶来的车辆的实际速度,或者小于130km/h的一个值;
v
A
C
S
F
v_{ACSF}
vACSF:自车实际车速;
a
a
a:
3
m
/
s
2
3m/s^2
3m/s2;
t
B
t_B
tB:
0.4
s
0.4s
0.4s;
t
G
t_G
tG:
1
s
1s
1s;
Ps: 自车开始变道操作0.4秒后,目标车道后方来车开始减速,当后方来车减速到与自车车速相同时,两车之间的距离要不小于自车在1秒内行驶的距离;
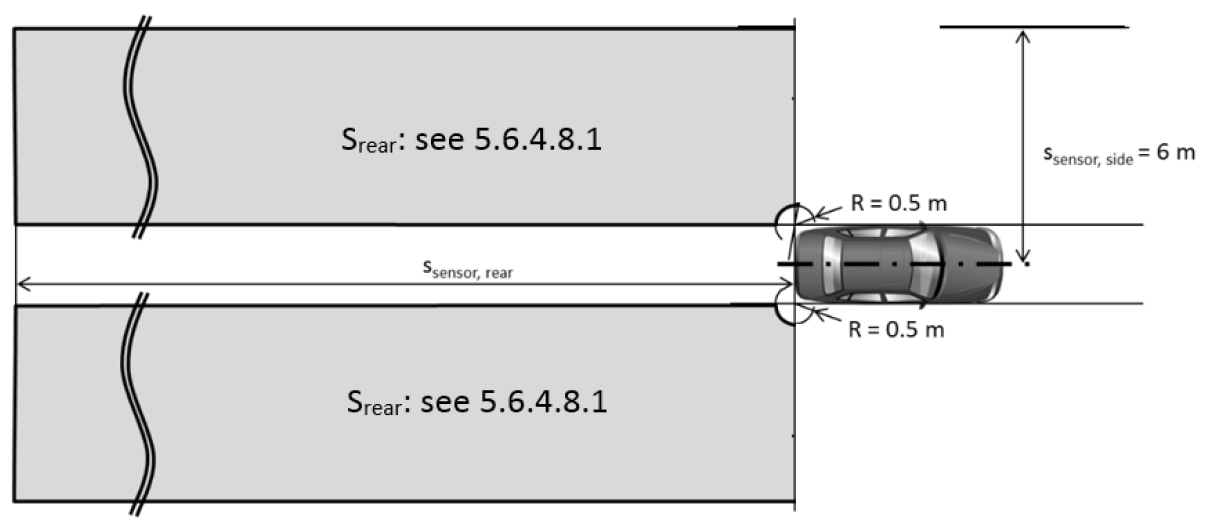
5.6.4.8 最小距离和最低运行速度
5.6.4.8.1. C类ACSF应能够检测到从相邻车道后方接近的车辆,检测距离应达到以下要求的
S
r
e
a
r
S_{rear}
Srear距离:
最小距离
S
r
e
a
r
S_{rear}
Srear应由车辆制造商进行声明,所声明的值不得小于55米;
所声明的距离应按照附件8中的相关测试,使用一辆L3类两轮摩托车作为接近车辆进行测试验证;
C类ACSF被允许执行变道操作的最低运行速度
V
s
m
i
n
V_{smin}
Vsmin,应使用最小距离
S
r
e
a
r
S_{rear}
Srear通过以下公式进行计算:
V
s
m
i
n
=
a
∗
(
t
B
−
t
G
)
+
v
a
p
p
−
a
2
∗
(
t
B
−
t
G
)
2
−
2
∗
a
∗
(
v
a
p
p
∗
t
G
−
S
r
e
a
r
)
V_{smin}=a*(t_B-t_G)+v_{app}-\sqrt{a^2*(t_B-t_G)^2-2*a*(v_{app}*t_G-S_{rear})}
Vsmin=a∗(tB−tG)+vapp−a2∗(tB−tG)2−2∗a∗(vapp∗tG−Srear)
S
r
e
a
r
S_{rear}
Srear:车辆制造商声明的最小探测距离;
V
a
p
p
V_{app}
Vapp:
36.1
m
/
s
36.1m/s
36.1m/s,接近车辆的实际车速(130km/h);
a
a
a:
3
m
/
s
2
3m/s^2
3m/s2;
t
B
t_B
tB:
0.4
s
0.4s
0.4s;
t
G
t_G
tG:
1
s
1s
1s;
若车辆在一个普遍最高车速限制低于130公里/小时的国家运行,则在该公式中,该最高车速限制可作为
V
a
p
p
V_{app}
Vapp的替代值,用于计算最低运行速度
V
s
m
i
n
V_{smin}
Vsmin,在此情况下,车辆应配备能够检测运行所在国家/地区的装置,并应能够获取该国家/地区的普遍最高车速限制信息;
尽管有上述要求,但C类ACSF被允许在低于计算得出的
V
s
m
i
n
V_{smin}
Vsmin的速度下执行车道变换操纵,前提是满足以下条件:
(a) 系统检测到在计划进行车道变换的相邻车道上存在另一辆车辆,且该车辆与本车的距离小于
S
r
e
a
r
S_{rear}
Srear,并且
(b) 根据5.6.4.7的规定,该情况不被视为紧急情况;
© 所声明的
S
r
e
a
r
S_{rear}
Srear值大于根据上述5.6.4.7计算得出的
S
c
r
i
t
i
c
a
l
S_{critical}
Scritical值。
5.6.4.8.2. 系统检测的最小区域如下图所示:
5.6.4.8.3. 在每次车辆新发动机启动/运行周期后(除自动执行的情况外,例如,启停系统的操作),C类ACSF应被禁止执行变道操作,直至系统至少一次检测到在大于制造商在上文5.6.4.8.1中声明的最小距离
S
r
e
a
r
S_{rear}
Srear处存在移动物体;
5.6.4.8.4. C类ACSF应能够检测到传感器的失灵情况(例如,污垢、冰或雪覆盖),一旦检测到传感器失灵,C类ACSF应被禁止执行变道操作,系统的状态应不迟于变道程序启动时向驾驶员发出信号,可以使用与第5.6.4.5.5段(系统故障警告)中规定的相同警告;
5.6.4.9 系统信息数据
5.6.4.9.1. 在进行型式认证时,应连同本法规附件6中要求的成套文件,向技术服务机构提供以下数据:
5.6.4.9.1.1. 系统可被激活的条件以及操作边界(边界条件),车辆制造商应针对本法规5.6.2.1.3表格中提及的每个速度范围,提供
V
s
m
a
x
V_{smax}
Vsmax(最高运行速度)、
V
s
m
i
n
V_{smin}
Vsmin(最低运行速度)和
a
y
s
m
a
x
ay_{smax}
aysmax(最大横向加速度)的值;
5.6.4.9.1.2. 关于系统如何检测驾驶员是否握住转向控制装置的信息;
5.6.4.9.1.3. 驾驶员接管、抑制或取消系统功能的手段;
5.6.4.9.1.4. 关于如何通过使用电子通信接口来检查故障警告信号状态以及确认与ACSF性能相关的软件版本信息;
5.6.4.9.1.5. 关于哪个ACSF性能相关的系统软件版本是有效的文档,每当软件版本被修改时,都应更新此文档;
5.6.4.9.1.6. 关于传感器在其使用寿命内的探测范围的信息,传感器的探测范围应被指定为传感器性能的任何退化都不应影响本法规5.6.4.8.3和5.6.4.8.4的要求;
5.7 针对安装在M1类和N1类车辆上的RCM的规定
任何RCM均应符合附件6的要求。
5.7.1. 符合G类要求的M1类和N1类车辆可配备RCM,但前提是该系统需满足以下要求。
5.7.1.1. RCM包括车辆上的软件和硬件,这些软件和硬件使得车辆能够被远程操控,同时还应包括一个执行器,该执行器位于一个独立的远程设备上,用于操作该功能;
5.7.1.2. RCM仅在驾驶员进行明确操作且系统运行条件满足(所有相关功能——例如制动器、加速踏板、转向系统、摄像头/雷达/激光雷达均正常工作)后,方可激活;
5.7.1.3. 只有在驾驶员持续按下远程设备上的专用按钮/开关时,RCM功能方可运行。远程设备上的另一个按钮/开关可用于控制车辆的运行。
5.7.1.4. 每当RCM功能运行时,至少应在远程设备上通过光信号向驾驶员发出指示;
5.7.1.5. RCM功能仅在车速不超过5公里/小时(允许有±1公里/小时的公差)时方可运行;
5.7.1.6. 在车辆运行过程中,若车辆在任何时候停止移动,RCM功能应防止车辆溜车;
5.7.1.7. 若持续操作被中断,或车辆与远程设备之间的距离超过规定的最大操作范围(
S
R
C
M
m
a
x
S_{RCMmax}
SRCMmax),或远程设备与车辆之间的安全连接丢失,车辆应立即停止;
5.7.1.8. 规定的RCM最大操作范围(
S
R
C
M
m
a
x
S_{RCMmax}
SRCMmax)不得超过6米;
5.7.1.9. 驾驶员应能够在任何时候停用RCM功能;
5.7.1.10. 若在车辆运行过程中车门或行李箱盖被打开,车辆应立即停止,且RCM功能应被停用;
5.7.1.11. 安全
5.7.1.11.1. RCM功能应受到保护,防止未经授权的激活或操作,以及防止对该功能进行非法干预。
5.7.1.11.2. 远程设备与车辆之间的连接应确保安全且加密,应通过技术手段确保RCM功能仅能由授权的远程控制装置进行操作;
5.7.1.12. 系统信息数据
在进行型式认证时,应连同本法规附件6中要求的成套文件,向技术服务机构提供以下数据:
5.7.1.12.1. RCM最大操作范围(
S
R
C
M
m
a
x
S_{RCMmax}
SRCMmax)的值;
5.7.1.12.2. RCM功能可被激活的条件,即系统运行条件满足时的情形;
5.7.1.12.3. 制造商应说明该功能是如何受到保护,以防止未经授权的激活或操作的;
5.7.1.13. RCM功能的设计应确保其仅能在车辆不处于以下任何位置时被激活:
(a) 公共道路/高速公路;
(b) 公共停车场(A public car park);
© 专门供行人和/或骑自行车者使用的区域;
在RCM功能处于激活状态时,车辆应能够确认其并不位于上述任何位置,且应通过至少两种独立的技术手段来实现这一确认。若使用导航地图进行此项确认,则若地图数据在过去12个月内未更新,RCM功能应被禁用。
5.7.1.14. 车辆应能检测运行区域内的障碍物(例如,其他车辆、行人),并在检测到障碍物时立即使车辆停止,以避免碰撞;
5.7.1.15. 若车辆在运行区域内检测到障碍物而停止,则后续操作仅在得到驾驶员确认后才能进行;对于在运行区域内随后检测到的任何物体,车辆应按照第5.7.1.14段的规定作出响应;
5.7.1.16. 仅当至少同时为一个前轴和一个后轴提供驱动力时,RCM功能才可运行;
5.7.1.17. 车辆应能检测在RCM功能处于激活状态时,车辆是否进入了5.7.1.13所列的任何区域,如果车辆进入了所述区域,车辆应立即停止,且RCM功能应被停用;
5.7.1.18. RCM功能的总行驶距离上限应为100米。若远程设备在1分钟内无任何输入,或系统已被停用且已过去至少1分钟的时间,则该距离可重置,且应从RCM功能下一次被操作的点开始重新测量。
5.7.1.19. 当总行驶距离达到75米(允许有±5米的公差)时,应向驾驶员发出警告信号,在远程设备上提供光学警告和触觉或声觉警告。
5.7.1.20. 若车辆达到或超过了5.7.1.18中定义的总行驶距离上限,则车辆应立即停止,且RCM功能应被停用。在1分钟之内不得再次激活RCM功能,应在远程设备上向驾驶员发出相关提示。
5.7.1.21. 制造商应向技术服务机构提供文件和证明材料,以证明车辆符合5.7.1.13、5.7.1.14、5.7.1.15和5.7.1.17的规定,这些信息应由技术服务机构和车辆制造商共同讨论并达成一致;
6. Test provisions
6.1 一般规定
6.1.1. 试验应在能够提供良好附着力的水平路面上进行;
6.1.2. 在试验过程中,车辆应加载至其技术上允许的最大总质量,且转向轴(或转向轴组)应加载至其技术上允许的最大轴荷。
对于装有ASE的车轴,应在车辆加载至其技术上允许的最大总质量,且装有ASE的车轴加载至其最大允许轴荷的情况下,重复进行此项试验。
6.1.3. 在试验开始前,轮胎气压应按照制造商的规定进行设置,该规定对应于车辆静止时第6.1.2段中指定的质量。
6.1.4. 对于任何部分或全部依靠电能供能的系统,所有性能试验均应在所有共用同一能源供应的重要系统或系统组件处于实际或模拟电气负载的条件下进行。重要系统应至少包括照明系统、挡风玻璃雨刮器、发动机管理系统以及制动系统。
6.2 车辆规定
6.2.1. 车辆应能在以下速度下,以切线方向驶出半径为50米的弯道,且转向设备无异常振动:
M1类车辆:50公里/小时;
M2、M3、N1、N2和N3类车辆:40公里/小时,或如果车辆的最大设计速度低于上述速度,则以最大设计速度为准;
6.2.2. 当车辆以转向轮近似处于半锁止状态,并以至少10公里/小时的恒定速度绕圈行驶时,若松开转向控制装置,转向圆应保持不变或变大;
6.2.3. 在测量转向力时,持续时间少于0.2秒的力不应计入;
6.2.4. 测量转向设备完好的机动车的转向力
6.2.4.1. 车辆应以10公里/小时的速度从直线行驶状态驶入螺旋形轨迹。应在转向控制装置的名义半径处测量转向轮控制力,直至转向控制装置的位置与下表中针对特定类别且转向设备完好的车辆所给出的转向半径相对应。应分别进行一次向右和向左的转向操作。
6.2.4.2. 下表列出了针对各类车辆,在转向设备完好情况下所允许的最大转向时间和最大转向控制力。
6.2.5. 测量转向设备出现故障的机动车的转向力
6.2.5.1. 应按照6.2.4所述的测试方法,在转向设备出现故障的情况下进行测试。应测量转向力,直至转向控制装置的位置与下表中针对特定类别且转向设备出现故障的车辆所给出的转向半径相对应。
6.2.5.2. 下表列出了针对各类车辆,在转向设备出现故障情况下所允许的最大转向时间和最大转向控制力。
 6.3.1. 当牵引车在平坦且水平的道路上以80公里/小时的速度直线行驶,或以制造商定义的技术允许最大速度(若该速度低于80公里/小时)行驶时,其转向设备应无过度偏移或异常振动。
6.3.1. 当牵引车在平坦且水平的道路上以80公里/小时的速度直线行驶,或以制造商定义的技术允许最大速度(若该速度低于80公里/小时)行驶时,其转向设备应无过度偏移或异常振动。
6.3.2. 在牵引车与挂车以5公里/小时的恒定速度进行稳态转弯,且转弯半径对应为25米(见2.4.6)的情况下,应测量挂车最后部外侧边缘所描绘的圆周。该操作应在相同条件下重复进行,但速度需调整为25公里/小时±1公里/小时。在这些操作过程中,以25公里/小时±1公里/小时速度行驶的挂车最后部外侧边缘,不得超出以5公里/小时恒定速度行驶时所描绘圆周0.7米。
6.3.3. 当牵引车沿切线方向离开6.3.2所述的圆形路径,并以25公里/小时的速度行驶时,挂车的任何部分均不得超出半径为25米的圆0.5米。这一要求应从切线与圆相交的点开始,一直满足到切线上40米远的点。在此点之后,挂车应满足6.3.1中规定的要求。
6.3.4. 应测量牵引车/挂车组合在转向系统完好无损的情况下,以不超过5公里/小时的速度在恒定半径圆周内行驶时所扫过的环形地面面积,其中牵引车的前外侧角的轨迹半径为0.67倍车辆组合长度,但不得小于12.5米。
6.3.4.1. 若在转向系统出现故障的情况下,所测得的扫过环形宽度大于8.3米,则与转向系统完好时所测得的对应值相比,该宽度增加量不得超过15%。同时,扫过环形宽度的外半径不得有任何增加。
6.3.5. 6.3.2、6.3.3和6.3.4所述的测试应在顺时针和逆时针两个方向上均执行。
7. 生产一致性
生产一致性程序应符合1958年协议附录1(E/ECE/TRANS/505/Rev.3)中规定的要求,并需满足以下附加条件:
7.1. 认证证书持有者应确保记录生产一致性测试的结果,并确保所附文件在与型式认证机构或技术服务机构商定的期限内保持可用。该期限自生产完全停止之日起计算,不得超过10年;
7.2. 授予型式认证的机构或技术服务机构可随时对每个生产设施所采用的生产一致性控制方法进行核查。这些核查的正常频率应为每两年一次。
8. 对生产不一致的处罚措施
8.1. 若未满足7.1中规定的要求,或抽样车辆不符合本法规6的要求,则依据本法规授予的某车型认证可能会被撤销。
8.2. 若应用本法规的某缔约方撤销了其先前授予的某项批准,则该缔约方应立即通过符合本法规附件1中模板的通信表格,将此情况通知其他同样应用本法规的缔约方。
9. 车辆型式认证的修改与扩展
9.1. 车辆型式的任何修改均应通知授予认证的型式认证机构。之后,型式认证机构可以:
9.1.1. 认为所做的修改不太可能产生显著的负面影响,且车辆仍符合相关要求;或
9.1.2. 要求负责进行测试的技术服务机构提供进一步的测试报告。
9.2. 认证的确认、扩展或拒绝,应详细说明所做的修改,并按照4.3中规定的程序通知本法规的各缔约方。
9.3. 颁发认证扩展的型式认证机构应为此类扩展分配一个系列编号,并使用符合本法规附件1中模板的通信表格,将此情况通知应用本法规的1958年协议的其他缔约方。
10. 生产完全停止
若认证证书持有者完全停止生产依据本法规获得认证的某类型车辆,其应将此情况通知授予认证的型式认证机构。型式认证机构在收到相关通知后,应使用符合本法规附件1中模板的通信表格,将此情况通知应用本法规的1958年协议的其他缔约方。
11. 负责进行认证测试的技术服务部门和型式认证机构的名称与地址
应用本法规的1958年协议缔约方应向联合国秘书处通报负责进行认证测试的技术服务部门以及授予认证的型式认证机构的名称与地址,同时通报应向哪些机构发送在其他国家签发的认证证书或认证扩展、拒绝或撤销认证的表格。
12. 过渡性条款
12.1. 适用于02系列修正案的过渡性条款:
12.1.1. 自02系列修正案正式生效之日起,除非下文另有规定,否则应用本法规的任何缔约方均不得拒绝依据经02系列修正案修订的本法规授予或接受联合国型式认证。
12.1.2. 自2018年4月1日起,应用本法规的缔约方没有义务接受任何在2018年4月1日之后首次签发的、依据之前任何系列修正案所授予的联合国型式认证。
12.1.3. 直至2021年4月1日,应用本法规的缔约方应继续接受依据本法规之前系列(01)修正案首次于2018年4月1日之前签发的联合国型式认证。
12.1.4. 自2021年4月1日起,应用本法规的缔约方没有义务接受依据本法规之前系列修正案所签发的联合国型式认证。
12.1.5. 尽管有第12.1.4段的规定,但对于不受02系列修正案影响的、依据本法规之前系列修正案所签发的联合国型式认证,仍应保持有效,且应用本法规的缔约方应继续接受这些认证。
12.1.6. 直至2020年4月1日,对于不符合5.6.2.2.5中规定的脱手警告信号红色要求,且在仪表盘中安装了无法显示红色警告信号或仅使用独立指示灯的多信息显示屏的新型车辆,仍可根据本法规02系列修正案授予型式认证。
12.2. 适用于03系列修正案的过渡性条款:
12.2.1. 自03系列修正案正式生效之日起,应用本法规的任何缔约方均不得拒绝依据经03系列修正案修订的本法规授予或接受联合国型式认证。
12.2.2. 自2019年9月1日起,应用本法规的缔约方没有义务接受依据本法规之前系列(02)修正案首次于2019年9月1日之后签发的联合国型式认证。
12.2.3. 直至2021年9月1日,应用本法规的缔约方应继续接受依据本法规之前系列(02)修正案首次于2019年9月1日之前签发的联合国型式认证。
12.2.4. 自2021年9月1日起,应用本法规的缔约方没有义务接受依据本法规之前系列修正案所签发的型式认证。
12.2.5. 尽管有第12.2.4段的规定,但对于不受03系列修正案规定影响的车辆,应用本法规的缔约方应继续接受依据本法规之前系列修正案所签发的联合国型式认证。
12.3. 适用于04系列修正案的过渡性条款:
12.3.1. 自04系列修正案正式生效之日起,应用本法规的任何缔约方均不得拒绝依据经04系列修正案修订的本法规授予或接受联合国型式认证。
12.3.2. 自2023年9月1日起,应用本法规的缔约方没有义务接受依据本法规之前系列修正案首次于2023年9月1日之后签发的联合国型式认证。
12.3.3. 直至2025年9月1日,应用本法规的缔约方应继续接受依据本法规之前系列修正案首次于2023年9月1日之前签发的联合国型式认证。
12.3.4. 自2025年9月1日起,应用本法规的缔约方没有义务接受依据本法规之前系列修正案所签发的型式认证。
12.3.5. 尽管有12.3.2和12.3.4的规定,但对于不受04系列修正案中5.1.6.3.9规定影响的车辆,应用本法规的缔约方应继续接受依据本法规之前系列修正案所签发的联合国型式认证。
12.4. 一般过渡性条款:
12.4.1. 应用本法规的缔约方不得拒绝依据本法规之前任何系列修正案或其扩展内容授予联合国型式认证。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









