







算法简介
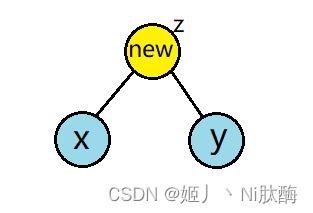
kruskal重构树建立在kruskal最小生成树算法上,假设在做kruskal最小生成树时将要加边 ( x , y , z ) (x,y,z) (x,y,z),即连接结点 x x x与结点 y y y,边权为 z z z,则建立一个新的点,分别连向 x x x和 y y y,点权为 z z z,同时将该点设置为 x x x与 y y y的代表结点(很熟悉对不对?其实就是并查集!)。以此类推,直至做出最小生成树。
图的性质
首先,最终的图一定是一棵二叉树;其次,父节点的点权一定比子节点大,并且对于节点 x x x和节点 y y y的 l c a lca lca的点权就是从 x x x到 y y y的所有路径最大边权的最小值(称为瓶颈路)。
算法应用
求瓶颈路
洛谷P2245 星际导航
板子题,求kruskal重构树后,对于每个询问,求这两个结点 l c a lca lca的点权即可。
#include<cstdio>
#include<algorithm>
#define maxn 200005
#define maxm 300005
using namespace std;
struct edge
{
int u,v,w;
edge(){
}
edge(int x,int y,int z)
{
u=x;v=y;w=z;
}
}ed[maxm];
struct node
{
int v,next;
}tr[maxn<<1];
int n,m,q,ndnum;
int tot,head[maxn];
int fa[maxn],val[maxn];
int dep[maxn],f[maxn][21];
bool cmp(edge x,edge y)
{
return x.w<y.w;
}
int find(int x)
{
return (fa[x]==x)?x:fa[x]=find(fa[x]);
}
void add(int x,int y)
{
tot++;
tr[tot].v=y;
tr[tot].next=head[x];
head[x]=tot;
}
void kruskal()
{
sort(ed+1,ed+1+m,cmp);
ndnum=n;
int cnt=0;
for(int i=1;i<=m;++i)
{
int x=ed[i].u,y=ed[i].v,z=ed[i].w;
x=find(x);y=find(y);
if(x==y)
continue;
cnt++;
fa[x]=fa[y]=++ndnum;//建立新点
add(ndnum,x);add(x,ndnum);
add(ndnum,y);add(y,ndnum);//向新点连边
val[ndnum]=z;//新点权值
if(cnt==n-1)
break;
}
}//构建kruskal重构树
void dfs(int x,int fath)
{
dep[x]=dep[fath]+1;
for(int i=0;i<20;++i)
f[x][i+1]=f[f[x][i]][i];
for(int t=head[x];t;t=tr[t].next)
{
int y=tr[t].v;
if(y==fath)
continue;
f[y][0]=x;
dfs(y,x);
}
}
int lca(int x,int y)
{
if(dep[x]<dep[y])
swap(x,y);
for(int i=20;i>=0;--i)
{
if(dep[f[x][i] 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 251
251











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









