






最近研究了下Plant Simulation 2302,发现软件新增了很多实用功能:
1、在Marker点模式下AGV自动寻路功能
之前在用Marker点+AGV做仿真建模时,就算静态路径规划也需要自己写Dijkstra或者A*算法,现在软件自带寻路功能了。
建模需要将Marker点以及AGVPool连接起来,然后设置AGV的目的地就行了。

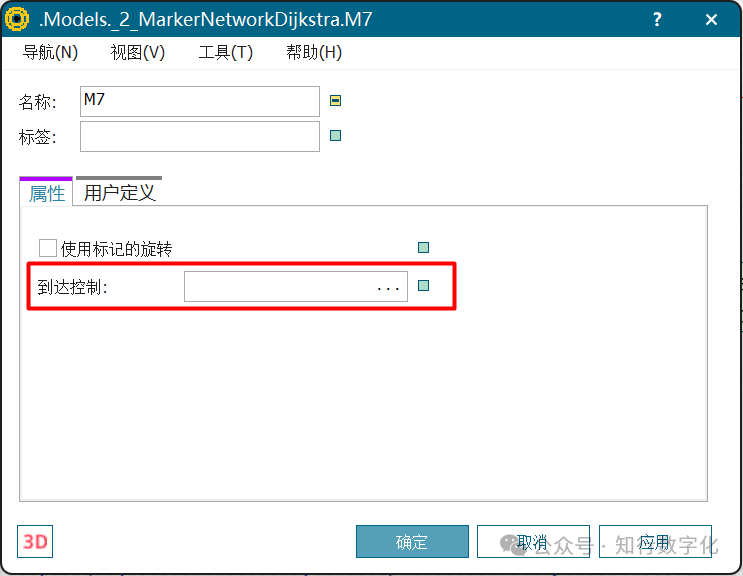
Marker点还新增了到达控件,但是这个功能感觉跟AGV到达目的地的控件功能重复了。
但对于AGV的交通管制和动态路径规划还是需要自己去开发。
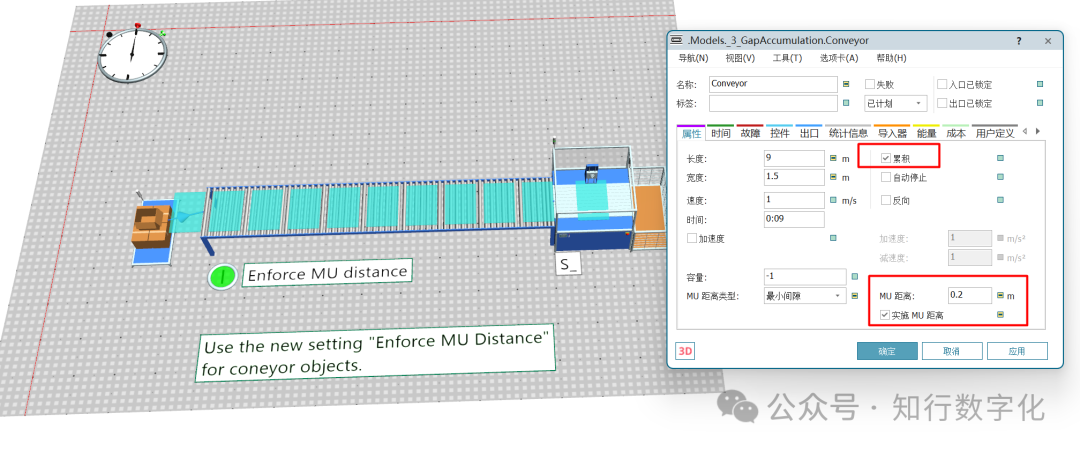
2、输送线在累积模式设定MU距离
之前版本Conveyor在累积模式下设置MU距离或者间隙是无效的,现在可以了,既可以累积,又能让MU保证一定间隙。
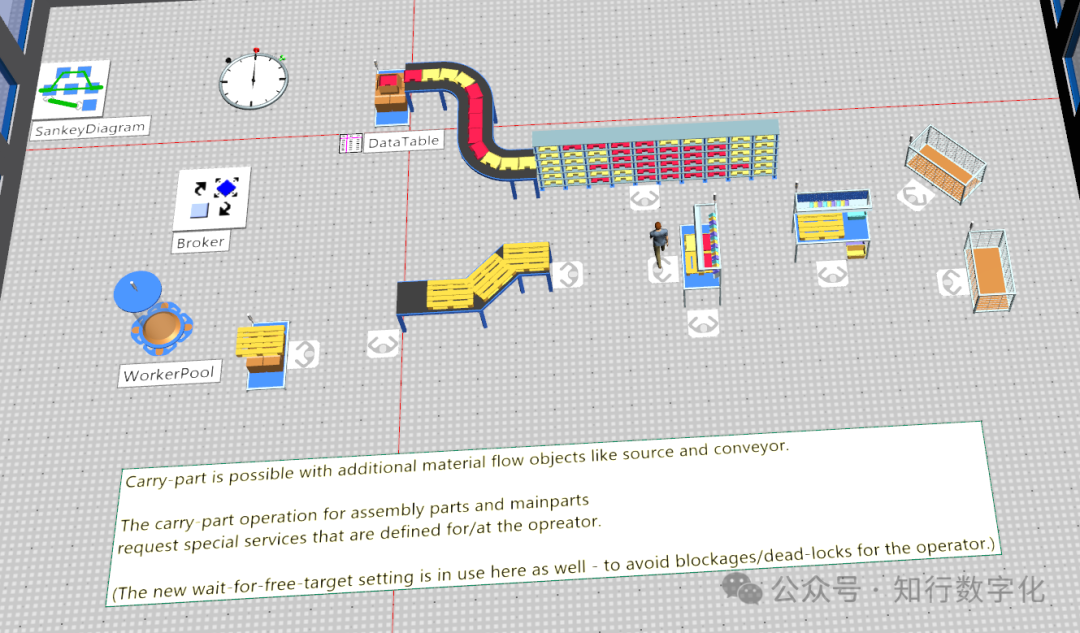
3、资源类对象人工功能升级
-
工人的搬运对象可以是输送线了;
-
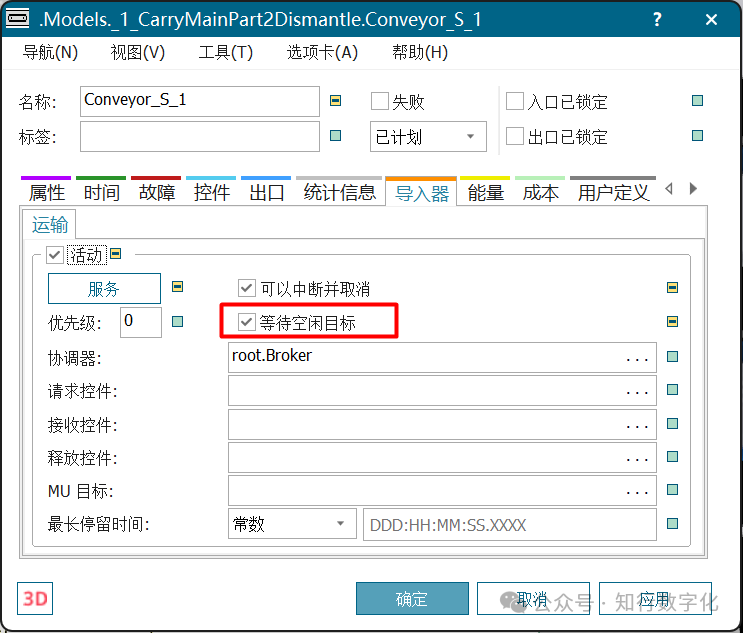
搬运增加了一个等待目标为空属性设置,避免死锁发生;
-
装配/拆卸的主零件和副零件可以由一个人来搬运。
4、事件控制器功能更新
Event Controller取消了快进功能,但是又新增了【跳过长事件间隔】按钮,感觉改了个寂寞。

![]()
关注微信公众号,获取更多相关文章
工厂规划:园区规划、车间规划、线体设计、物流规划、辅助设施规划
数字孪生:物流仿真、工艺仿真、虚拟调试、BIM建模、动画视频制作
















 1987
1987











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









