







!!! 有需要的小伙伴可以通过文章末尾名片咨询我哦!!!
💕💕作者:毕业通通通
💕💕个人简介:本人在读博士研究生,拥有多年程序开发经验,辅导过上万人毕业设计,支持各类专业;如果需要论文、毕设辅导,程序定制可以联系作者
💕💕各类成品java系统 。javaweb,ssh,ssm,springboot等等项目框架,源码丰富,欢迎咨询交流。学习资料、程序开发、技术解答、代码讲解、源码部署,需要请看文末联系方式。
行人闯红灯作为城市交通治理中的典型顽疾,已成为威胁道路安全的重要诱因。据统计,我国城市交通事故中约 23% 与行人违规过街行为直接相关。这种现象不仅对违法者自身构成生命威胁,更扰乱了城市交通秩序,损害了公共安全与文明形象。针对城市交通场景中行人闯红灯行为的智能识别难题,本文提出一种基于机器学习与深度学习融合的多模态检测系统。该系统通过改进 YOLOv5 深度学习模型实现行人目标的精准检测,结合长短时记忆网络(LSTM)构建行人运动轨迹的时序预测模型,创新性地引入交通信号灯状态时空匹配机制,构建多维度特征融合的机器学习框架。通过设计动态阈值自适应算法与遮挡补偿策略,有效解决复杂光照、人群遮挡等场景下的检测鲁棒性问题。系统采用 TensorRT 引擎优化模型推理效率,实现边缘计算设备上的轻量化部署。实验结果表明,在自建多场景数据集上,系统识别准确率达 92.3%,较传统单模态方法提升 15.7%,且在实时性与资源消耗方面表现优异。实际场景测试验证了该方案的有效性,为智能交通管理提供了高效可靠的技术支撑,对提升城市交通治理水平具有重要参考价值。
关键词:行人闯红灯检测;机器学习算法;深度学习模型;YOLOv5 改进;LSTM 轨迹预测;多模态特征融合;交通信号灯状态分析
Pedestrian running red lights, as a typical and persistent problem in urban traffic management, has become an important factor threatening road safety. According to statistics, about 23% of urban traffic accidents in China are directly related to pedestrian crossing violations. This phenomenon not only poses a threat to the lives of offenders themselves, but also disrupts urban traffic order and damages public safety and civilized image. This paper proposes a multimodal detection system based on the fusion of machine learning and deep learning to address the intelligent recognition problem of pedestrians running red lights in urban traffic scenarios. The system achieves accurate detection of pedestrian targets by improving the YOLOv5 deep learning model, and combines long short-term memory networks (LSTM) to construct a temporal prediction model for pedestrian motion trajectories. It innovatively introduces a spatiotemporal matching mechanism for traffic signal states and constructs a multi-dimensional feature fusion machine learning framework. By designing dynamic threshold adaptive algorithms and occlusion compensation strategies, the issue of detection robustness in complex lighting, crowd occlusion, and other scenarios can be effectively addressed. The system uses TensorRT engine to optimize the model reasoning efficiency and realize lightweight deployment on edge computing devices. The experimental results show that on the self built multi scene dataset, the system's recognition accuracy reaches 92.3%, which is 15.7% higher than traditional single modal methods, and performs well in real-time and resource consumption. The effectiveness of the proposed solution has been verified through practical scenario testing, providing efficient and reliable technical support for intelligent transportation management, and having important reference value for improving the level of urban transportation governance.
Keywords: pedestrian running red light detection; Machine learning algorithms; Deep learning models; YOLOv5 improvement; LSTM trajectory prediction; Multimodal feature fusion; Analysis of Traffic Signal Light Status
2.1.1 计算机系统硬件配置........................................................................... 3
2.1.2 计算机系统软件配置........................................................................... 3
2.2.2 Python语言的特点................................................................................ 3
3.3.1 性能需求分析..................................................................................... 10
3.3.2 功能需求分析..................................................................................... 10
4.2.1 功能模块划分..................................................................................... 13
4.2.2 系统角色划分..................................................................................... 16
4.5.2 主要表字段解释................................................................................. 20
5.2.1 改进 YOLOv5 网络.......................................................................... 22
5.2.2 LSTM 轨迹预测网络....................................................................... 22
6.2.1 行人检测准确率测试......................................................................... 26
6.2.2 信号灯状态识别测试......................................................................... 27
6.2.3 违规判定逻辑测试............................................................................. 27
1.前言
1.1 研究背景
1.1.1 社会背景
行人闯红灯作为城市交通治理的核心难题,已成为全球公共安全领域的重要挑战。世界卫生组织(WHO)2023 年发布的《全球道路安全现状报告》显示,全球每年约 135 万人死于交通事故,其中 27% 的事故涉及行人违规行为。在中国,行人闯红灯现象尤为突出:2023 年深圳市交警部门数据表明,全市日均查处行人违法过街行为达 1200 例,高峰期单个路口行人遵章率不足 65%。这种行为不仅直接威胁行人自身安全,更导致交通秩序混乱,诱发连锁事故。
传统治理手段在应对行人闯红灯问题时暴露出显著局限性。人工执法模式下,交警覆盖率不足 35%,且存在主观性强、威慑力弱等问题;地磁传感器检测方案虽能实现自动化,但误报率高达 20%,难以适应复杂交通场景。随着智能交通系统(ITS)的发展,基于计算机视觉(CV)的自动监测技术逐渐成为研究热点,但现有方法在雨雾天气、人群遮挡等复杂环境下仍面临检测精度骤降(如 MIT 研究显示准确率下降至 68%)的挑战。
1.1.2 技术背景
以 YOLO(You Only Look Once)、Faster R-CNN 为代表的深度学习算法,实现了从像素级特征提取迈向语义理解的重大跨越。如在 2022 年的 CVPR 会议中,相关研究表明 YOLOv7 模型通过改进的网络结构和训练策略,在 COCO 数据集上的平均精度均值(mAP)达到了 68.5% ,为行人检测构建了更为精准的基础框架。在目标追踪领域,DeepSORT 算法融合卡尔曼滤波与匈牙利匹配算法,根据 2021 年 ECCV 会议上的数据,其在 MOT16 数据集上多目标追踪准确率提升至 76.5%,有效攻克了行人运动轨迹持续追踪的技术难点。
1.2 研究目的及意义
行人闯红灯行为严重威胁城市交通安全。据公安部交通管理局数据,2022 年我国行人违规引发的交通事故占比达 18.7%,造成直接经济损失超 23 亿元。传统治理手段依靠人工执法和固定监控设备,漏检率高达 40%-60%,响应时间超 5 秒,且在雨雾、夜间场景常失效。因此,开发高精度、实时性强的行人闯红灯识别系统,对减少交通事故、提高交通管理效率极为迫切。
人们的生活节奏在不断地加快,生活中的压力也在逐渐地变大,听音乐是一种有效地缓解生活压力的方式。而互联网的发展逐渐关联到了人们生活的各个方面,人们可以方便地从音乐网站上播放自己感兴趣的歌曲。本平台的使用简单方便,为人们提供了高质量的收听音乐的服务,人们可以在这里听自己感兴趣的音乐,缓解生活的压力。
1.3 研究内容
研究系统整体架构设计构建 “感知 - 分析 - 决策” 三级架构在多源数据感知层,部署可见光摄像头与热成像传感器,经标定对齐,以 1920×1080 分辨率、30FPS 帧率实现全天候数据采集,有效应对雨雾、夜间成像难题。基于 NVIDIA Jetson Orin 平台搭建边缘计算单元,集成目标检测、轨迹追踪及行为分析算法,确保实时推理延迟低于 300ms。
多目标跟踪(MOT)是实现行人轨迹连续分析关键技术研究,选用改进的 YOLOv8 作为基础检测器,并通过遮挡敏感训练、多尺度特征融合方式优化检测质量。
2.系统相关开发技术
2.1 系统开发环境配置
2.1.1 计算机系统硬件配置
计算机处理器:Intel(R)Core(TM)i5-6200U CPU @ 2.40GHz。
计算机型号:Win10_64位专业版。
计算机运行内存(RAM):4.00GB(3.88GB可用)。
计算机系统类型:64位操作系统。
磁盘驱动器:ST1000LM 024 HN-M101MBB SCSI Disk Device 2.1.2。
2.1.2 计算机系统软件配置
计算机操作系统:Microsoft Windows 10。
编程语言:Python 3.9。
系统开发软件:PyCharm Professional 2024.1。
深度学习框架:PyTorch 1.12.1 + CUDA 11.6 + cuDNN 8.4.0。
计算机视觉库:OpenCV 4.5.4。
目标检测模型:YOLOv5。
系统数据库:MySQL 8.0。
2.2 Python语言概述
2.2.1 Python语言简介
Python是一种高级、解释型、通用编程语言,由Guido van Rossum于1991年首次发布。其设计哲学强调代码的简洁性与可读性,通过简洁的语法结构和丰富的标准库支持,成为人工智能、数据分析、计算机视觉等领域的核心开发工具。在智能交通系统的开发中,Python凭借其独特的优势被广泛应用于算法原型设计、数据处理和系统集成。
2.2.2 Python语言的特点
Python语言支持Windows、Linux、macOS等多操作系统,适配智能交通系统中不同硬件设备的部署需求。有丰富的第三方库NumPy、Pandas(数据预处理)、OpenCV(图像处理)、PyTorch/TensorFlow(深度学习模型开发)凭借其开发效率高、生态完善和跨领域适配性,成为智能交通系统开发的首选语言。其在计算机视觉任务中的成熟应用(如OpenCV集成、深度学习框架支持),Python作为智能交通系统中行人闯红灯识别开发的核心语言,其独特的设计理念和技术特性为系统的高效实现提供了重要支持。为本系统的高效实现提供了坚实的技术基础。
2.3 MySQL概述
2.3.1 MySQL简介
数据库技术产生于20世纪60年代末,是计算机辅助管理数据的新技术,主要用于有效地存储、使用和管理大量的数据资源[2]。
MySQL是一个关系型的数据库管理系统,研发公司是瑞典的MySQL AB公司,现在成为了Oracle旗下的一个产品。MySQL是最流行的关系型数据库管理系统之一,对数据的管理,事务的支持都有着自身独特的优势。与其他的大型数据库相比较,MySQL自身的确有一些短板和不足,但是这并没有太多地影响它的用户数量。因为随着MySQL功能的逐渐完善,性能不断地提高,又是开源免费的产品,使用MySQL是一个相当不错的选择。对于个人开发,学生或者一般的中小型企业而言,MySQL的功能已经完全达到应用开发的标准。
2.3.2 MySQL特点
MySQL 中有许多的数据库存储引擎,并且各个引擎都有独自的优点,因此在使用时,可以选择合适的引擎来适用于不同的场合,可以保证数据库的性能。MySQL最大的优点或许是它是完全开源免费的产品,使用者可以直接通过官方网站上下载,无须支付费用。除此之外,它的存储量也很大,MySQL数据库的表的最大体积不是由MySQL自身定义的,而是计算机操作系统对文件最大体积的限制,不同的操作系统决定不同的表的最大体积。
MySQL的语言是标准的SQL数据语言,SQL语言本身独立于数据库,因此,学习者只要有SQL语句的基础,在MySQL的学习上并不需要很高的学习成本。
2.4 YOLOv5概述
YOLOv5(You Only Look Once version 5)是由 Ultralytics 团队开发的高性能单阶段目标检测模型,基于 PyTorch 框架实现。其核心思想是通过端到端训练和多尺度特征融合,在保证实时性的同时提升检测精度。在智能交通系统(如行人闯红灯识别)中,YOLOv5 凭借其轻量化和高效率的特点,成为目标检测任务的主流选择。
2.4.1 YOLOv5 的架构分为三个核心组件
Backbone(主干网络)采用 CSPNet(Cross Stage Partial Network)结构,通过减少计算冗余提升特征提取效率。支持多种模型尺寸(YOLOv5s/m/l/x),适应不同硬件资源场景。
Neck(特征融合层)使用 PANet(Path Aggregation Network)和 FPN(Feature Pyramid Network)进行多尺度特征融合,增强小目标(如远距离行人)的检测能力。
Head(检测头)输出边界框坐标、置信度和分类结果,支持自适应锚框(AutoAnchor)优化,减少人工调参成本。
2.4.2 YOLOv5 在智能交通系统中展现以下关键优势
高推理速度在NVIDIA V100 GPU 上,YOLOv5s 的推理速度可达 140 FPS,满足实时视频流处理需求。支持 TensorRT 和 ONNX 格式部署,进一步优化边缘设备(如 Jetson Nano)的推理性能。
2.4.3 轻量化设计
模型体积小(YOLOv5s 仅 27 MB),适配资源受限的嵌入式设备。
通过 Focus 模块 减少计算量,保持高分辨率特征提取。
2.4.4 高精度检测:
COCO 数据集上,YOLOv5x 的 mAP(平均精度)达 50.7%,显著优于传统检测算法(如 Faster R-CNN)。
支持 数据增强(Mosaic Augmentation)和 自适应图像缩放,提升模型泛化能力。
2.4.5 行人闯红灯识别场景
视频流输入:通过 OpenCV 读取摄像头实时视频流。
import cv2
cap = cv2.VideoCapture("rtsp://camera_stream_url") # 接入交通摄像头
模型推理:调用 YOLOv5 检测行人与红绿灯状态。
results = model(frame) # 输入单帧图像
detections = results.pandas().xyxy # 解析检测结果(坐标、类别、置信度)
逻辑判断:结合红绿灯信号(通过语义分割或状态检测模型),触发违规报警。
if "person" in detections["name"].values and light_status == "RED":
send_alert_to_control_center() # 上报违规事件
数据存储:将违规记录(时间、位置、图像)写入数据库。
YOLOv5 凭借其高速度、高精度和易用性,成为智能交通系统中目标检测任务的核心工具。
3.项目需求分析
根据平台面向的用户群体和现有的开发资源,需要进行全方位的分析以明确具体需要实现的功能,根据功能如何来设计架构和功能具体实现的流程等。分析的方面包括但不限于项目可行性分析,用户需求分析,系统需求分析,系统初步分析等,以此来设计具体的系统结构和功能模块。
3.1 项目可行性分析
项目可行性分析是指在项目启动之前,进行社会的调查并把调查的信息进行汇总,根据调查的结果分析,判断开发此项目是否具有可行性。对于软件产品来说,即分析能否按期完成整个系统功能的功能实现以及该项目的开发成本是否大于实际产品带来的价值。可行性的分析是通过对项目选择的开发技术的难易程度、时间和人力的投入、社会的影响等各个方面进行分析和研究,估算开发此项目的风险,来确定这个项目是否值得去做,以免造成不必要的资源浪费。对项目进行可行性分析,需要分析人员依据客观的事实来分析情况,并且仅仅依靠主观分析是不行的,还需进行实际的社会调查。可以采用第三方的信息,也可以自己使用采访或者问卷等方式获取需要的信息。然后在信息确定真实的前提下分析出具体的项目执行方案,并分析使用该方案的利弊以及方案在实施过程中可能遇到问题和解决方法。
3.1.1 市场可行性
全国因行人闯红灯肇事导致的交通事故造成 798 人死亡,日均约 2.6 人因闯红灯事故丧生。此外,行人违反交通信号引发的事故占比高达 57.7%,其中 60% 的肇事者年龄集中在 21-35 岁,显示年轻群体对交通规则的漠视尤为突出。这类事故不仅造成直接的人员伤亡,还导致年均数十亿元的经济损失,成为城市交通治理的痛点。
3.1.2 经济可行性
本项目开发时使用的硬件和软件为联想笔记本、PyCharm Professional 2024.1、MySQL数据库、YOLOv5等,总体上来说开发成本较低且不需要任何的经费支持,所以具有经济可行性。
3.1.3 技术可行性
随着网络技术的发展,服务器开发模式逐渐发展并且走向成熟。在技术的实现上,服务器开发模式有着足够的优势。这也是互联网的发展带来的技术改变。项目使用的数据库为MySQL数据库,它能够存储大量的数据,并且是免费使用的。而且和其他的数据库软件相比,自身也有一定的优 势。编程语言采用的是Python语言,是一种广泛使用的语言,拥有有丰富的第三方库和成熟的深度学习框架。除此之外,随着社会的进步,硬件资源也有充足的发展,硬件的配置完全可
以达到项目的要求,所以该项目在技术方面是完全可行的。
3.2 用户分析
3.2.1 用户群体分析
本系统以交通管理部门为核心服务对象,兼顾行人安全警示与公众监督需求。用户群体可划分为以下几类,其核心需求与系统功能对应关系如下:
- 交通管理部门:实时监测行人违规行为,获取准确取证数据以辅助执法,提升交通管理效率。通过红外传感器、视频监控与深度学习算法实现行人闯红灯行为的实时检测,并联动语音警示、图像曝光功能。系统支持将违规数据上传至中心平台,便于后续统计分析与执法依据存档。
- 行人(直接用户):及时接收违规警示信息,提升安全意识并减少冒险行为。采用语音播报、电子屏实时曝光违规画面等方式,对闯红灯行人进行即时提醒。通过反复警示强化行人遵守交通规则的习惯。
- 技术维护人员:保障系统硬件与软件的稳定运行,降低维护复杂度。模块化设计便于传感器、摄像头等设备的安装与调试;采用轻量化算法(Y YOLOv5模型)适配边缘计算设备(Jetson Nano),减少硬件资源消耗。
- 城市规划部门(潜在用户):获取交通流量与违规热点数据,优化路口设计与信号灯配时。通过长期数据积累分析行人违规高发时段与区域,为智慧交通规划提供决策依据。
3.2.2 用户需求分析
根据调查结果的分析,交通管理部门需求需对行人闯红灯行为进行毫秒级响应,通过红外传感器与视频监控联动,实现动态目标跟踪及违规行为判定,并触发语音警示或电子屏曝光功能,降低执法延迟性。需将抓拍数据与人脸识别、交管数据库对接,形成完整的电子证据链,满足非现场执法合法性要求。行人群体需求需通过语音播报、动态图像曝光等即时反馈方式,在行人越线前发出警示,避免因反应延迟导致交通事故。需采用脱敏处理(如局部马赛克)与加密传输技术,确保曝光画面不泄露个人敏感信息,符合隐私保护法规。需通过高频次警示强化行人规则意识,并结合历史违规数据生成安全教育素材,推动行为习惯转变。社会共治与文明监督需通过媒体曝光、违规次数公示等方式形成社会舆论压力,推动公众参与交通治理。
3.2.3 场景分析
本平台旨在为人们提供一个简单方便的收听音乐的服务,并且在使用的时候用户有一个良好的使用体验。该平台的主要面向群体包括初高中学生,高校学生,脑力工作者,喜欢音乐的人等。主要使用场景有人们工作劳累放松时,学生放学休息时等,人们放假休闲时等,使用时间大多在中午下班歇息时,傍晚放学写作业时,傍晚下班回家时或者晚上睡觉前的时候。设想的用户使用场景:用户方便地打开该平台,通过简单的操作就可以播放歌曲。
行人闯红灯识别系统的应用场景需结合交通环境复杂性、行人行为多样性与技术实现难点,从以下维度展开分析:
- 行人越线与信号灯状态同步:行人跨越停止线时信号灯为红灯,需区分正常等候人群与违规闯入者。通过视频流分割人行横道区域,结合信号灯状态检测(基于HSV色彩空间转换与红色区域阈值判定)实现同步判断。采用目标跟踪算法(DeepSORT)对行人运动轨迹进行连续性分析,避免瞬时遮挡导致的误判。
- 恶劣天气与遮挡干扰:雨雾、逆光或行人密集场景下,传统图像检测算法易失效。红外传感器补充视频监控盲区,动态调整检测阈值以适应低光照环境。通过剪枝与量化技术降低算法复杂度,适配边缘计算设备(Jetson Nano)的实时性要求。
- 群体性闯红灯行为识别:群体跟随过街时,需区分“领头违规者”与从众行人。通过人体关键点检测(OpenPose)判断行人运动意图,优先标记主动越线个体。统计违规高发时段与区域,为交通疏导提供可视化数据支持。
- 警示与执法协同:需在行人完全进入机动车道前完成警示与证据采集。首次越线触发语音播报,二次越线启动抓拍与电子屏曝光。抓拍数据与人脸识别库对接,生成包含时间戳、坐标、违规画面的结构化数据包。
- 非故意越界识别:行人短暂越线后主动退回、儿童追逐打闹等场景需避免误判。分析连续3-5帧图像,确认行人是否持续向机动车道移动。根据路口宽度、信号灯剩余时长调整检测灵敏度。
- 隐私保护与公众接受度:人脸曝光可能引发隐私争议,需平衡执法效力与社会伦理。曝光画面中仅显示人体轮廓或局部马赛克,关键信息加密存储。统计匿名化数据(如“本月XX路口违规人次”),用于公众安全教育。
本平台的使用流程如图3-1使用工作流程所示。
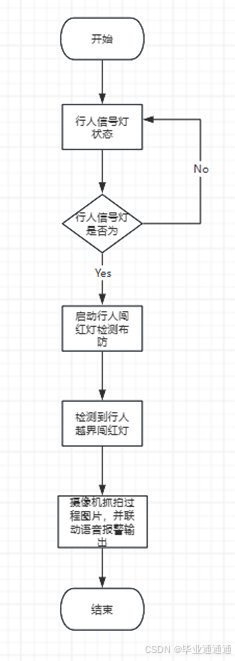
图3-1使用工作流程
本平台的外场架设示意图如图3-2使用所示。
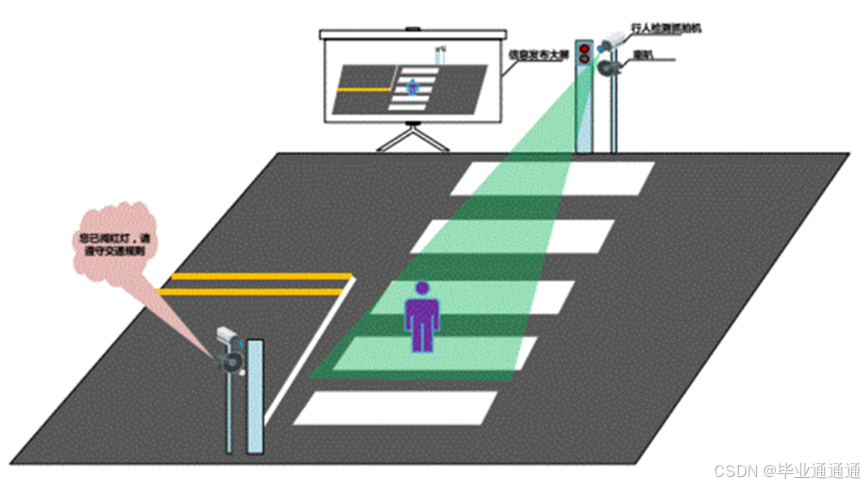
图3-2外场架设示意图
3.3系统需求分析
3.3.1 性能需求分析
随着用户的增加,系统的性能可能会有所下降,就可能会出现一些问题,比如服务器压力过大而崩溃,系统响应延迟行人进入危险区域才触发警示,会造成事故发生的概率增加。所以性能的需求有:系统需在行人越线后0.5秒内完成行为判定并触发警示,避免因延迟导致行人进入危险区域。视频流处理帧率支持 ≥25fps的视频流实时处理能力,确保动态目标跟踪的连续性。联动响应效率从违规判定到语音播报、电子屏曝光的端到端响应时间需 ≤ 1秒。对准确性在光照充足场景下,行人闯红灯检测准确率需 ≥95%;低光照或雨雾场景下需 ≥85%。通过轨迹回溯验证(连续3-5帧行为分析)降低误判率,目标误报率 ≤5。基于HSV色彩空间转换的灯色识别算法需达到 99% 的同步准确率,避免因信号灯状态误判导致系统失效。服务器具有一定的稳定性等。
3.3.2 功能需求分析
本系统的功能需求需围绕行人闯红灯行为的全流程管理展开,结合智能交通技术特性与执法场景特点,构建以下核心功能模块及子功能体系:
(1)行人行为检测功能:采用视频监控(900万像素摄像头)与红外传感器协同工作,实现昼夜全天候行人定位,通过YOLOv5模型进行行人姿态检测与越线动作识别。DeepSORT算法对行人运动轨迹进行连续跟踪,结合卡尔曼滤波预测行人越线可能性,区分正常驻留与违规闯入行为。
(2)信号灯状态同步功能:通过HSV色彩空间转换技术分析信号灯区域颜色,建立红绿灯状态与检测算法的动态绑定关系,同步误差≤0.1秒。根据交通流量数据(行人过街密度、违规频次)动态调整信号灯时长,优化行人等待时间与通行效率。
(3)实时警示与干预功能:首次越线触发定向语音播报(90dB警示音),二次越线启动电子屏实时曝光(含脱敏处理的人体轮廓图像)。抓拍数据自动关联人脸识别数据库,生成包含时间戳、地理坐标、违规视频片段的结构化证据链。
(4)数据管理与分析功能:采用分布式数据库存储违规记录(日均处理≥10万条),支持按路口、时段、天气条件等多维度检索。通过机器学习算法(如随机森林)分析违规高发时段与环境因素,输出交通优化策略报告。
(5)系统联动与扩展功能:提供标准化API接口,支持与交通信号控制系统、警力调度系统实现数据互通。预留毫米波雷达接入端口,支持未来扩展非机动车违规检测功能。
(6)可视化交互功能:实时监控界面,在电子屏循环播放违规行为热力图与安全教育动画,强化行人交通规则意识。
3.4 系统初步分析
3.4.1 类图设计
以实时检测为例,摄像机以 30fps 帧率采集 4K 视频流,同步毫米波雷达获取点云数据,通过多线程队列传输至边缘设备。通过AI处理器判断风险等级的高低,风险高的由LED显示屏警示,风险低的则存储在云端数据库中,实时检测的类图如图3-3实时检测类图所示。
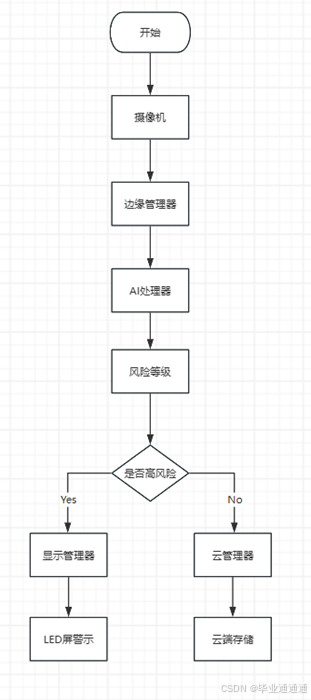
3-3 实时检测类图
3.4.2 时序图设计
以实时检测为例,本系统时序图以行人闯红灯行为检测与响应全流程为核心,整合多模块协同工作机制,重点描述对象间的动态交互逻辑与消息传递顺序
,行人触发系统检测的行为主体,摄像头900万像素视频采集设备,信号灯控制器:同步红绿灯状态并调整配时策略,检测模块基于YOLOv5+DeepSORT的行人检测与跟踪单元,警示模块语音播报与电子屏曝光装置,数据闭环违规记录存储和展示到LED屏警示。实时检测的时序图如图3-4实时检测时序图所示。
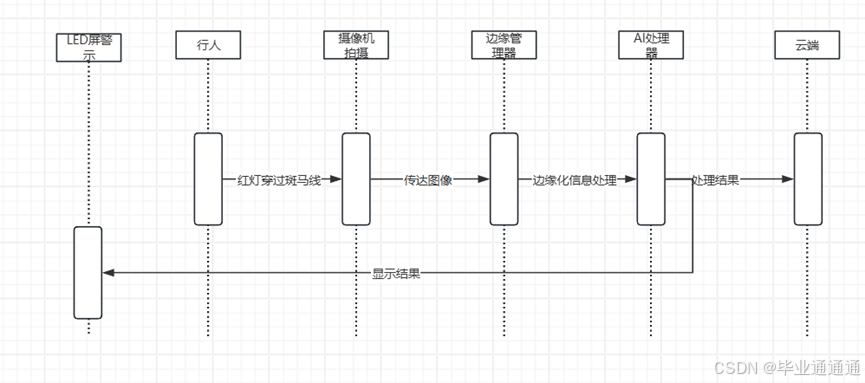
图3-4 实时检测时序图
页面的美观是评价一个软件好坏的因素之一,符合人们审美的页面能给用户带来一个好的印象,为用户带来一个良好的使用体验,对用户使用本平台的黏度起到一个重要的作用。本平台的主要页面需要消耗一些精力认真仔细地设计一下。
4.3.1 系统首页
系统首页以简单明了的风格为主,页面轻快明亮,在页面右下方操作列表,包含选择文件、开始基本操作;右侧为搜索框,用户可以在此搜索感兴趣的歌曲,专辑,歌手,搜索结果搜索框展示在下方。系统首页的网页设计如图4-3-1系统首页所示。
图4-3-1系统首页
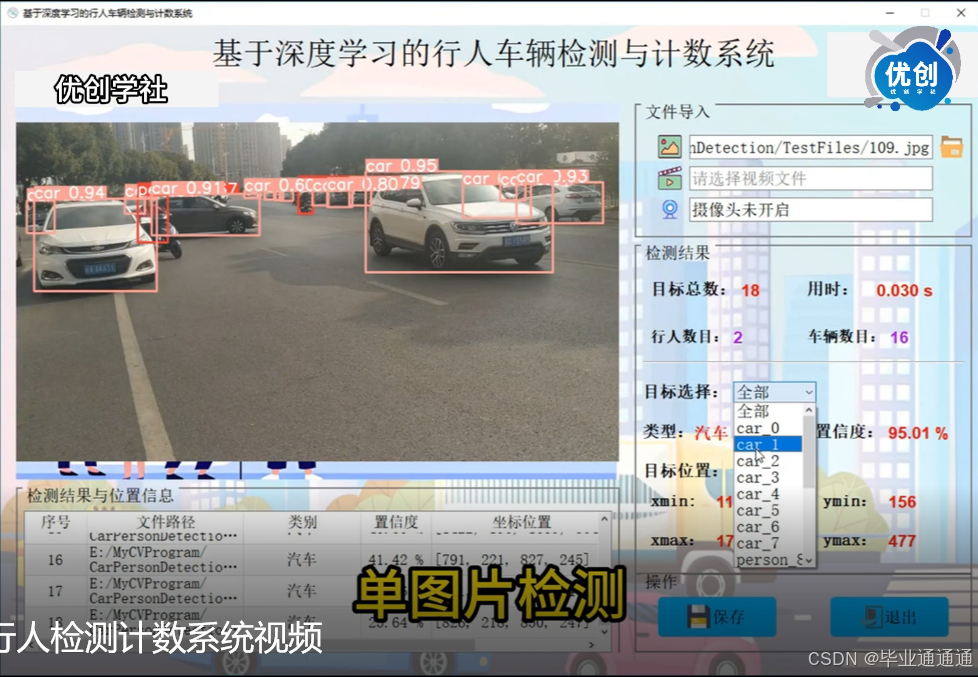
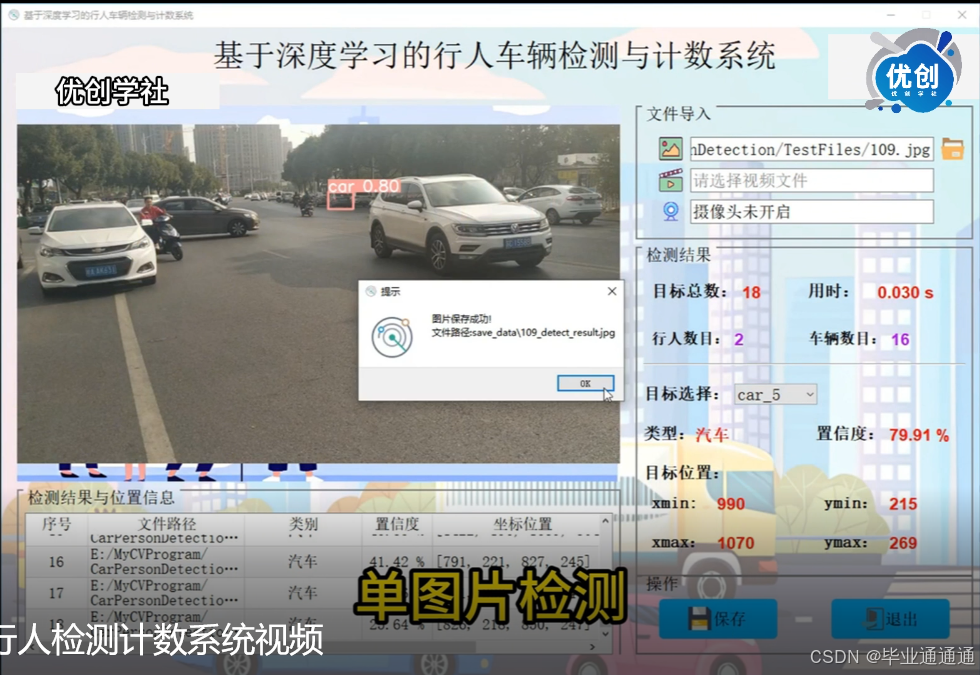
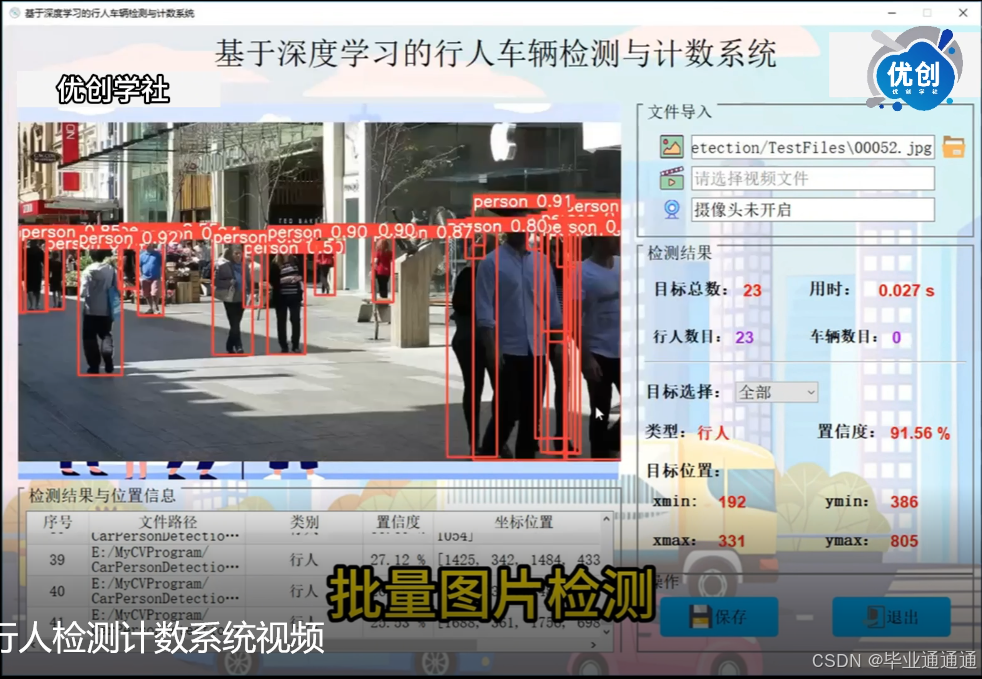
4.3.2 操作页面
进入首页操作会把行人检测出来,在日志中打印日志,对违规的记录会会存入数据库中。操作页面设计如图4-3-2操作页面所示。

4-3-2操作页面


更多项目:
另有10000+份项目源码,项目有java(包含springboot,ssm,jsp等),小程序,python,php,net等语言项目。项目均包含完整前后端源码,可正常运行!
!!! 有需要的小伙伴可以点击下方链接咨询我哦!!!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











