







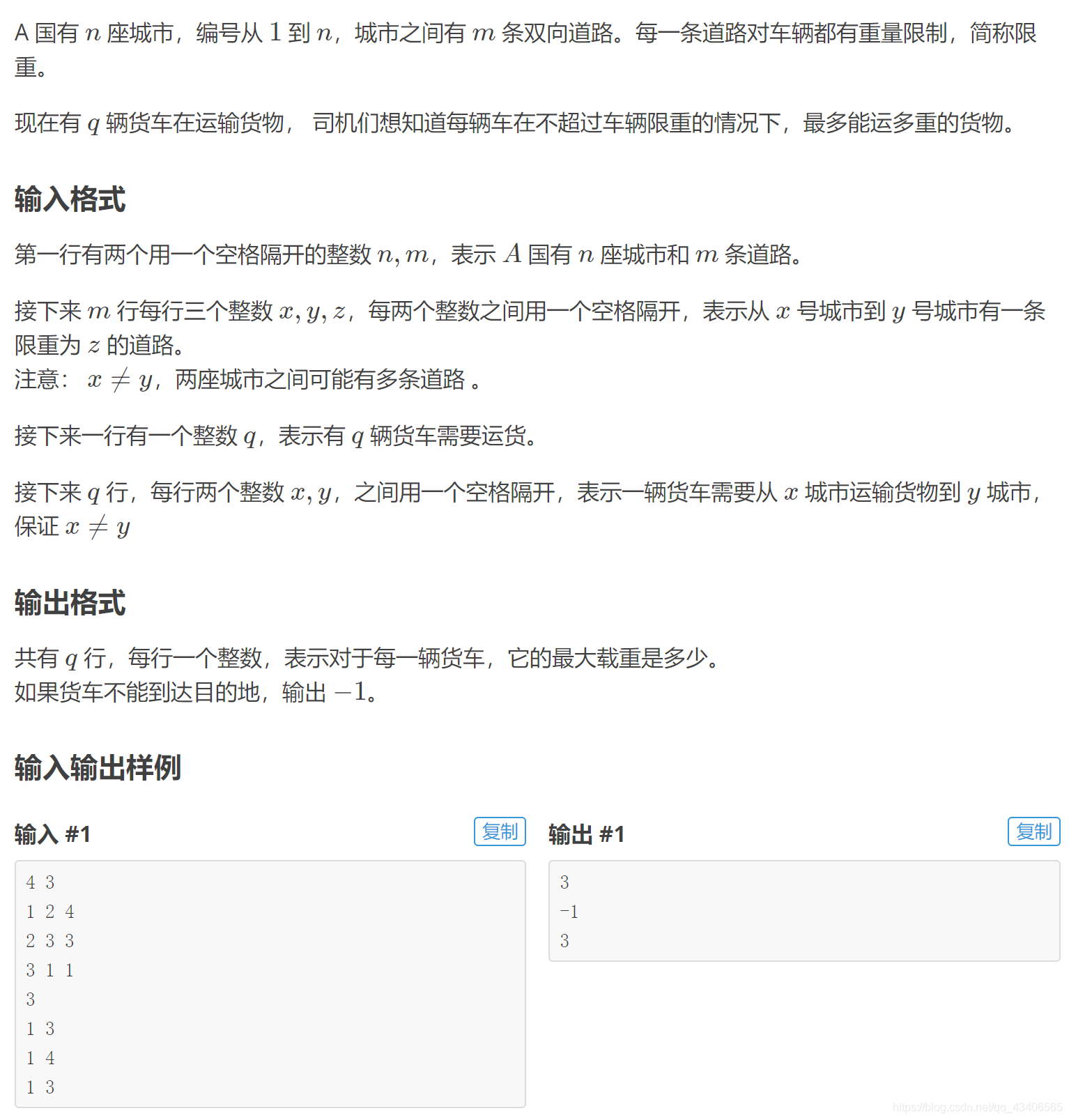
一、题目描述
二、解题思路
原来用单纯的Kruskal算法超时了,看了大神们的方法第一次学链式向前星和倍增LCA,下面详细介绍以下链式向前星和倍增LCA
三、链式向前星
链式向前星是一种加快稠密图搜索的一种方法,它是在邻接表的基础上的一种优化,它的存储结构如下:
struct node
{
int to;
int next;
}edge[maxv];
to表示边的终点,next表示与该条边的起点相同的上一条边在edge中的索引。因此下一步需要解决的问题就是如何找到上一条在edge中的位置。可以多加一个数组head[i]来记录最近的以i为起点的边在edge中的位置,head初始化为0。因此建图的函数如下:
struct node
{
int to;
int next;
}edge[maxv];
int head[maxn];
int cnt=1;//表示edge数组的下标,也可以表示已经存入的边数
void add(int from,int t)
{
edge[cnt].to=t;
edge[cnt].next=head[from];
head[from]=cnt++;
}
我们假设输入的边的顺序为<1,2><1,3><2,3>:
① 当输入<1,2>时,edge[1].to=2,edge[1].next=head[1]=0,head[1]=1;
② 当输入<1,3>时,edge[2].to=3,edge[2].next=head[1]=1,head[1]=2;
③ 当输入<2,3>时,edge[3].to=3,edge[3].next=head[2]=0,head[2]=3。
以dfs举例说明链式向前星的遍历过程。代码如下:
void dfs(int start)
{
vis[start]=true;
for(int i=head[start];i!=0;i=edge[i].next)
{ //当i==0时就表示已经没有以start为起点的可以访问的边了
if(!vis[edge[i].to])
dfs(edge[i].to);
}
}
三、倍增LCA

LCA即最近公共祖先。例如图中F和E的最近公共祖先为B。若我们现在要找H点和E点的最近公共祖先,一个朴素的想法就是H点一步步往上跳,当跳到和E点的深度相同时,比较一下此时跳到的点是不是E点,可惜这时跳到的是D点。这个时候,就要兵分两路,从D点和E点再同时往上跳,每跳一次比较一下是不是跳到了同一个点上,如果是同一个点那么这个点就是二者的LCA,否则需要继续往上跳。但是这样一步一步往上跳也太慢了吧,那有没有什么可以加速的方法呢?二进制优化!二进制优化真是个好东西,上次学到的多重背包问题也可以使用二进制优化。
我们现在增设一个二维数组dp[i][j],它表示第i个结点往上跳2j步后的所在结点。二进制优化的原理是,任何一个正整数都可以表示为若干个2k的和(k=0,1,2,…)。经过分析我们可以很容易得到如下等式:dp[i][j]=dp[dp[i][j-1]][j-1]。因此我们的初始化函数可以表示为
//fa表示每个点的父节点
int fa[100],DP[100][20];
void init()
{
//n为结点数,先初始化DP数组
for(int i=1;i<=n;i++)
dp[i][0]=fa[i];
//动态规划求出整个DP数组
for(int j=1;i<20;j++) //一般在题目中不会有树超过2^20层吧?暂且设为20
for(int i=1;i<=n;i++)
DP[i][j]=DP[DP[i][j-1]][j-1];
}
寻找LCA的代码如下
//查询函数
int LCA(int a,int b)
{
//确保a的深度大于b,便于后面操作。
if(deep[a]<deep[b])
swap(a,b);
//让a不断往上跳,直到与b处于同一深度
//若不能确保a的深度大于b,则在这一步中就无法确定往上跳的是a还是b
for(int i=19;i>=0;i--)
{
//往上跳就是深度减少的过程
if(deep[a]-1<<i>=deep[b])
a=dp[a][i];
}
//若二者处于同一深度后,正好相遇,则这个点就是LCA
if(a==b)
return a;
//a和b同时往上跳,从大到小遍历步长,遇到合适的就跳上去,不合适就减少步长
for(int i=19;i>=0;i--)
{
//若二者没相遇则跳上去
if(dp[a][i]!=dp[b][i])
{
a=dp[a][i];
b=dp[b][i];
}
}
//最后a和b跳到了LCA的下一层,LCA就是a和b的父节点
return dp[a][0];
}
四、AC代码
#include<cstdio>
#include<algorithm>
#include<cstring>
#include<iostream>
#define MAXN 10005
#define INF 999999999
using namespace std;
struct Edge1 {
int x, y, dis;
}edge1[50005]; //题目所给的图
struct Edge2 {
int to, next, w;
}edge2[100005]; //最大生成树的图
int cnt, n, m, head[MAXN], deep[MAXN], f[MAXN], fa[MAXN][21], w[MAXN][21];
bool vis[MAXN] = { false };
void addedge(int from, int to, int w)
{ //前向星存图
edge2[++cnt].next = head[from]; //存入同一个起点的上一条边的索引
edge2[cnt].to = to; //存入终点
edge2[cnt].w = w;
head[from] = cnt;
return;
}
bool CMP(Edge1 x, Edge1 y)
{
return y.dis < x.dis; //将边权从大到小排序
}
int find(int x) {
if (f[x] != x) f[x] = find(f[x]);
return f[x];
}
void kruskal()
{
sort(edge1 + 1, edge1 + m + 1, CMP);
for (int i = 1; i <= n; i++)
f[i] = i; //并查集初始化
for (int i = 1; i <= m; i++)
if (find(edge1[i].x) != find(edge1[i].y)) {
f[find(edge1[i].x)] = find(edge1[i].y);
addedge(edge1[i].x, edge1[i].y, edge1[i].dis);
addedge(edge1[i].y, edge1[i].x, edge1[i].dis); //无向图,双向加边
}
return;
}
void dfs(int node)
{
vis[node] = true;
for (int i = head[node]; i; i = edge2[i].next) { //前向星遍历
int to = edge2[i].to;
if (vis[to]) continue;
deep[to] = deep[node] + 1; //计算深度
fa[to][0] = node; //储存父节点
w[to][0] = edge2[i].w; //储存到父节点的权值
dfs(to);
}
return;
}
int lca(int x, int y)
{
if (find(x) != find(y)) return -1; //不连通,输出-1
int ans = INF;
if (deep[x] > deep[y]) swap(x, y); //保证y节点更深
for (int i = 20; i >= 0; i--)
if (deep[fa[y][i]] >= deep[x]) {
ans = min(ans, w[y][i]); //更新最大载重(最小边权)
y = fa[y][i]; //y为上跳的位置
}
if (x == y) return ans; //如果位置已经相等,直接返回答案
//寻找公共祖先
for (int i = 20; i >= 0; i--)
if (fa[x][i] != fa[y][i]) {
ans = min(ans, min(w[x][i], w[y][i])); //更新最大载重(最小边权)
x = fa[x][i];
y = fa[y][i]; //修改x,y位置
}
ans = min(ans, min(w[x][0], w[y][0]));
//更新此时x,y到公共祖先最大载重,fa[x][0], fa[y][0]即为公共祖先
return ans;
}
int main()
{
int x, y, z, q;
scanf("%d%d", &n, &m);
for (int i = 1; i <= m; i++) {
scanf("%d%d%d", &x, &y, &z);
edge1[i].x = x;
edge1[i].y = y;
edge1[i].dis = z;
} //储存题目所给图
kruskal();
for (int i = 1; i <= n; i++) //不一定为连通图,所以需要对每个点进行收集
if (!vis[i]) { //dfs收集信息
deep[i] = 1;
dfs(i);
fa[i][0] = i;
w[i][0] = INF;
}
//LCA初始化
for (int i = 1; i <= 20; i++)
for (int j = 1; j <= n; j++) {
fa[j][i] = fa[fa[j][i - 1]][i - 1];
w[j][i] = min(w[j][i - 1], w[fa[j][i - 1]][i - 1]);
}
scanf("%d", &q);
for (int i = 1; i <= q; i++) {
scanf("%d%d", &x, &y);
printf("%d\n", lca(x, y)); //回答询问
}
return 0;
}














 318
318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









