










引用与参考 LiGrip O1 Lite 轻量化三维激光扫描仪快速手册
1 仪器与软件
仪器 LiGrip O1 Lite

软件 LiDAR 360 MLS 7.2
2 带RTK 数据的解算
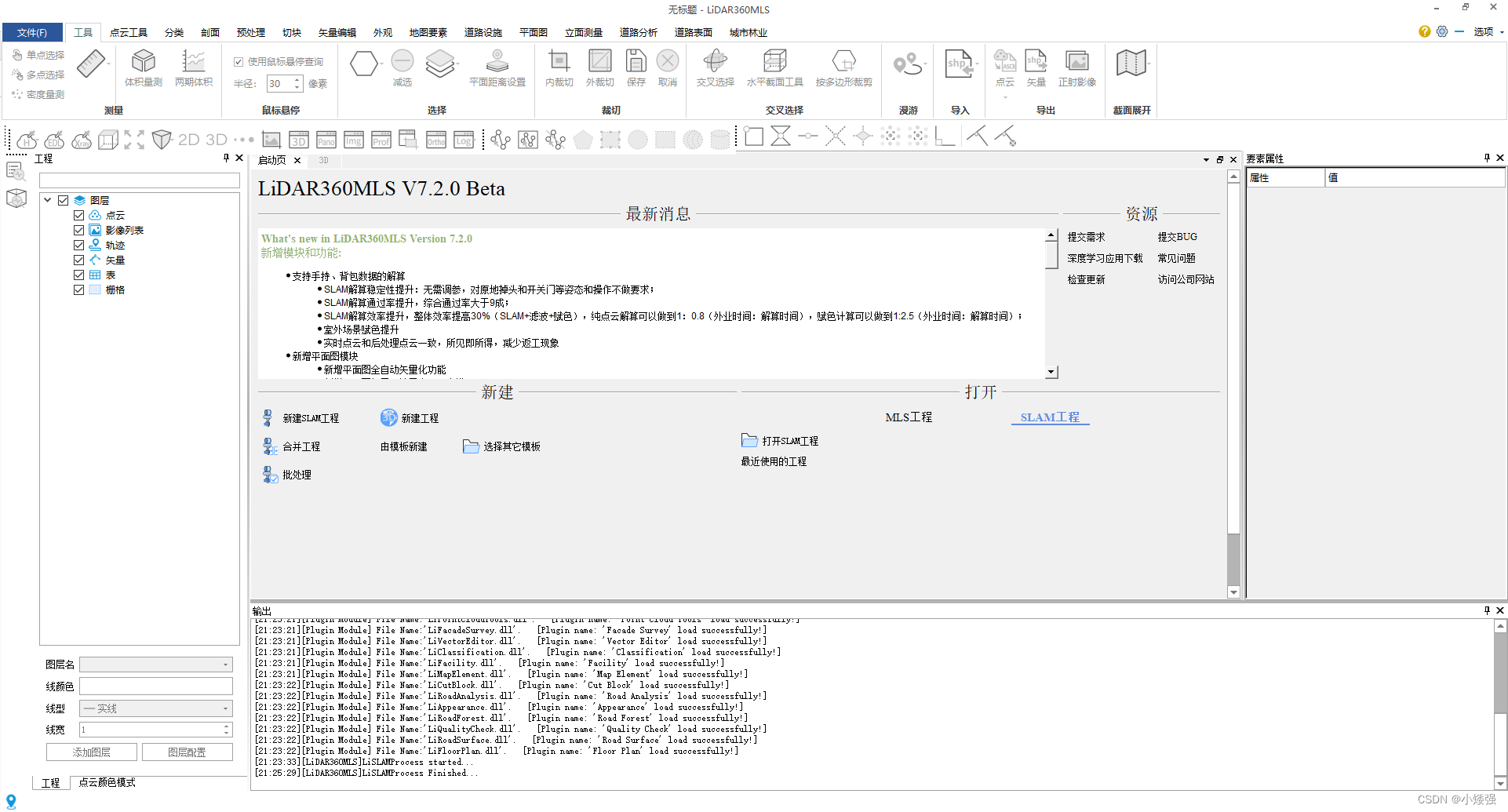
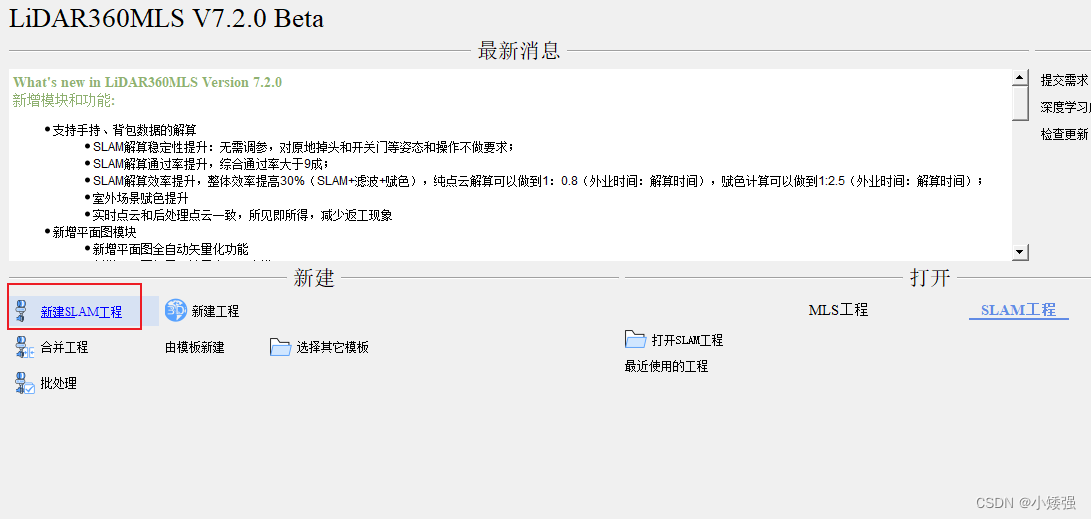
2.1 点击MLS 界面,新建SLAM 工程。或者从“新建”-“文件”-“新建SLAM 工程”进行。
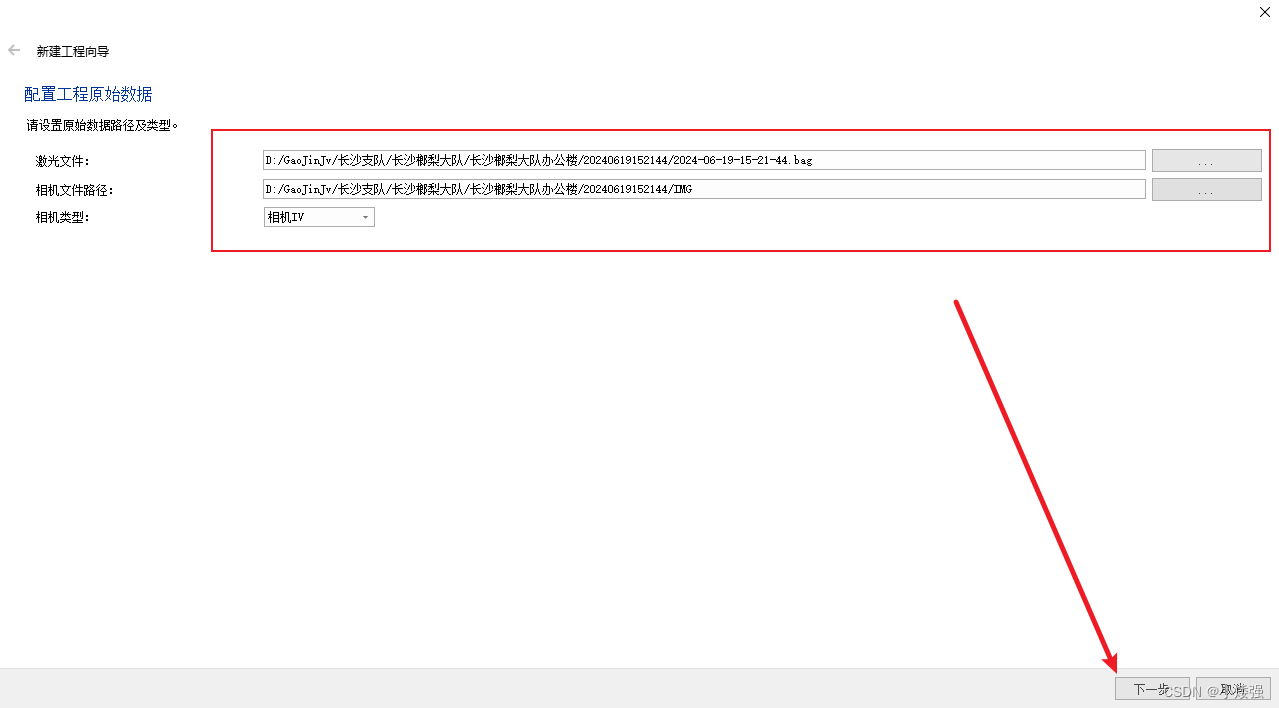
2.2 配置激光文件和IMG 的路径(相机可选),相机类型默认,下一步。
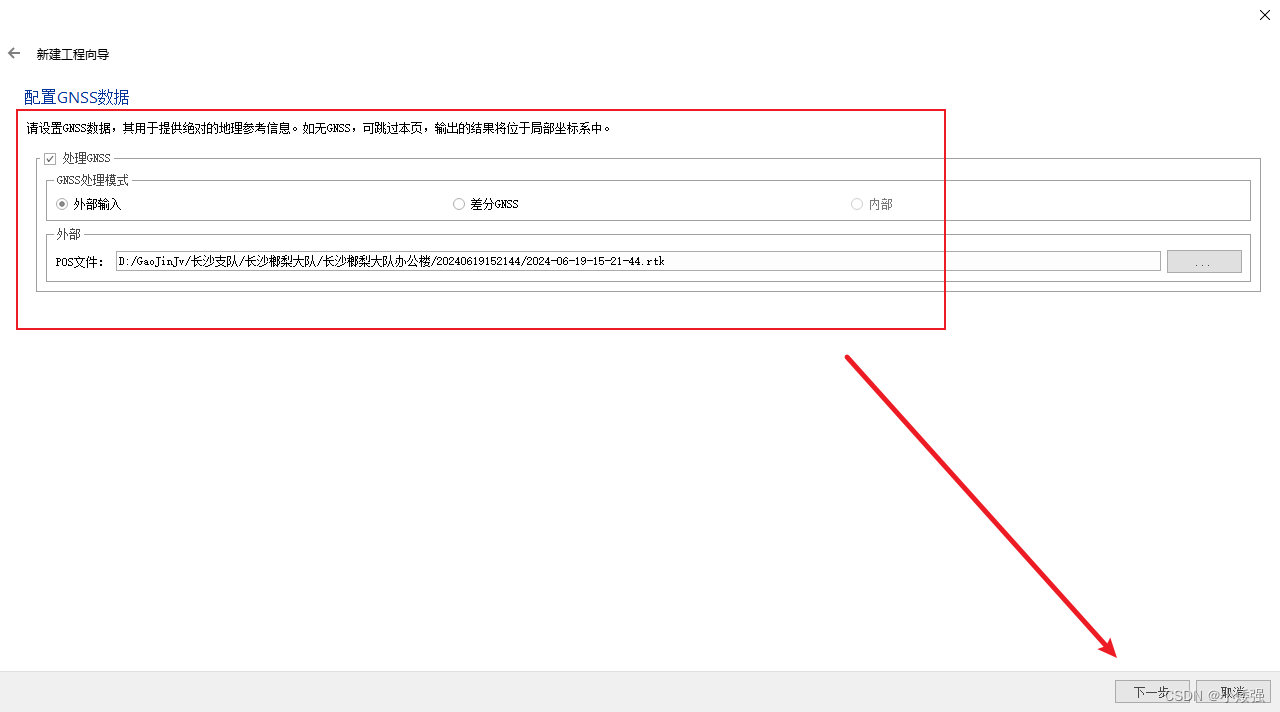
2.3 配置GNSS 数据,勾选“处理GNSS”选择“外部输入”,选择RTK 文件,下一步。
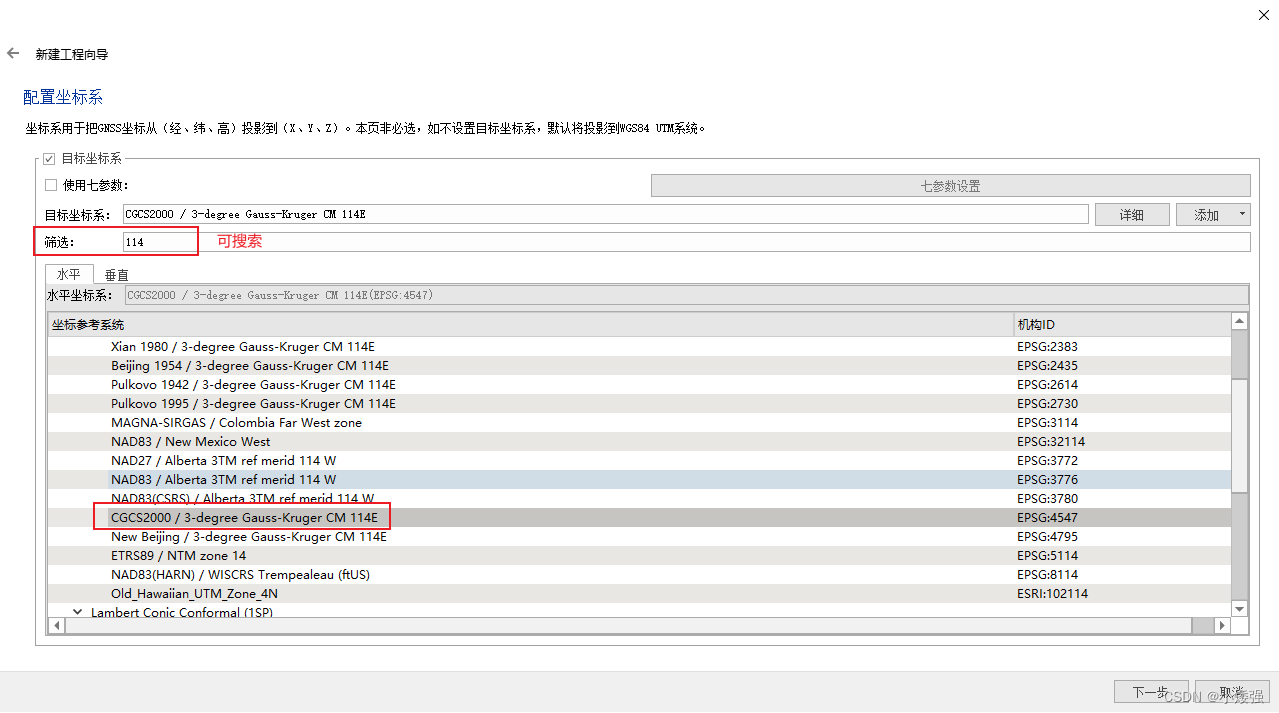
2.4 配置坐标系,选择你需要的坐标系,下一步
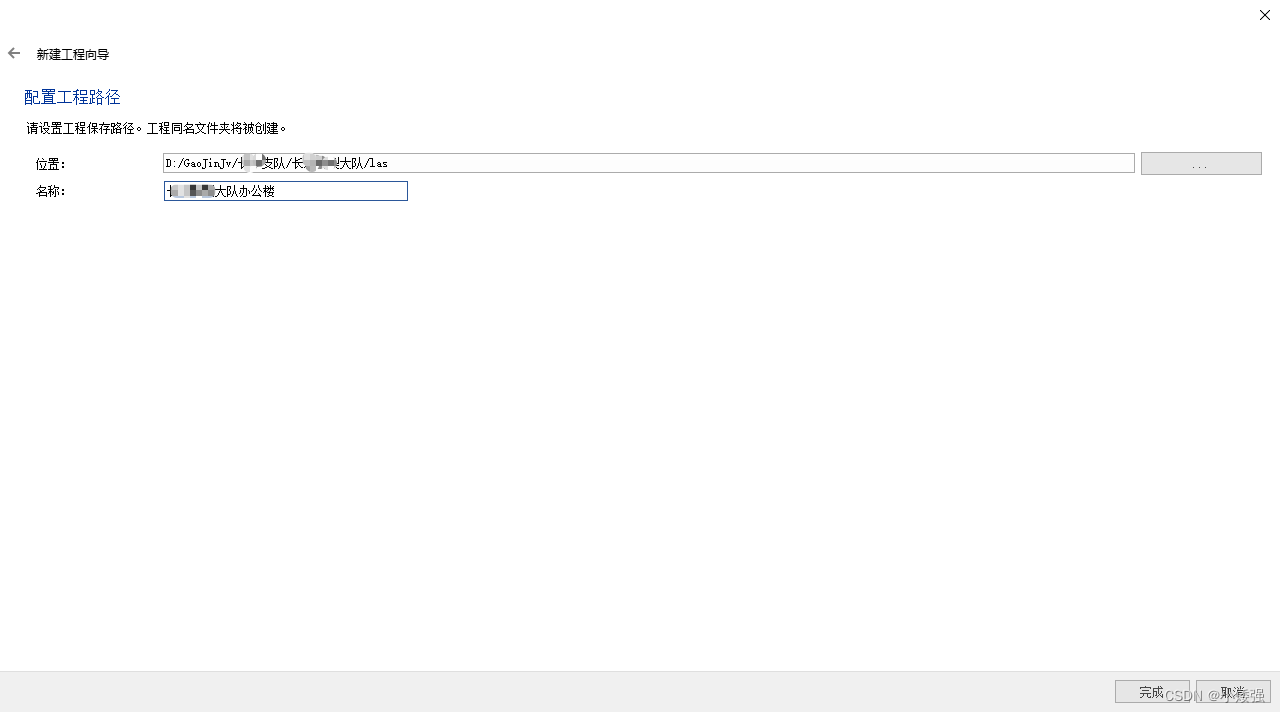
2.5 配置工程文件夹和工程文件名,点击完成。
2.6 进入主界面之后,点击开始按钮。注意:如果需要修改设置,可以到工程设置里面进行。
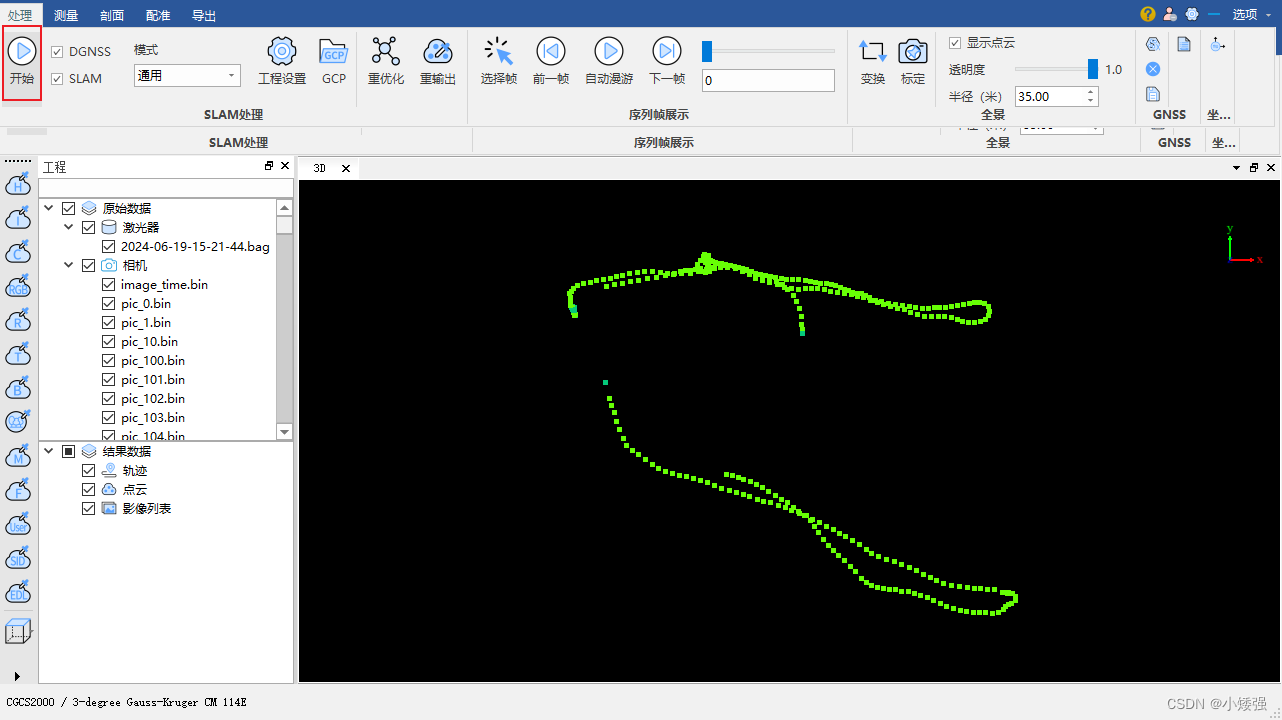
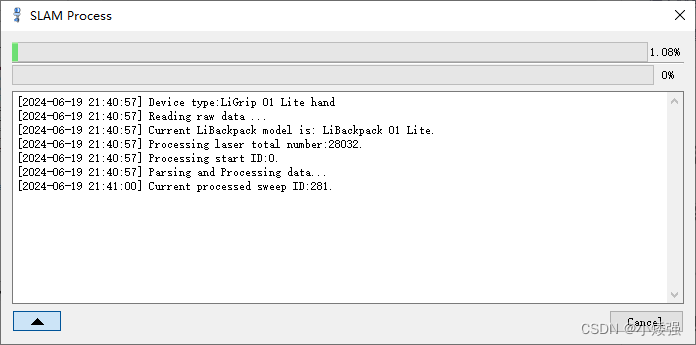
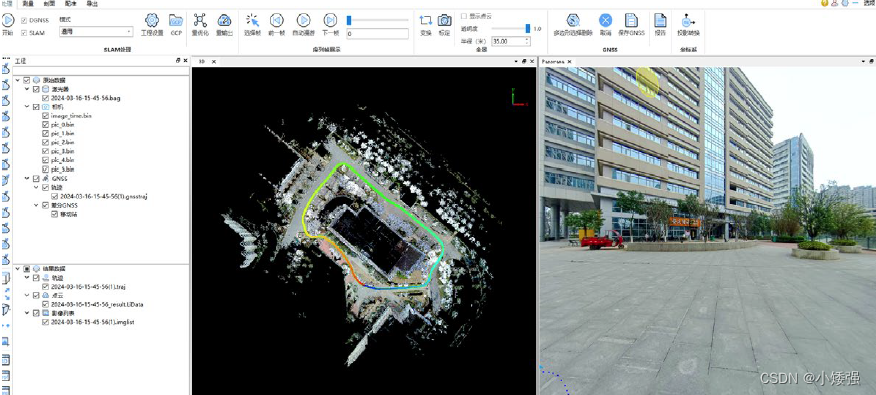
2.7 等待程序运行结束,即可得到最终的点云数据成果。
3 相对坐标下的数据解算
与“带RTK 数据的解算”的一致,只是无须配置RTK 数据和坐标系,最后“开始”得到相对坐标系下面的点云结果。
4 带控制点的数据解算
4.1 得到相对坐标的点云
与“数据解算- 相对坐标下的数据解算”的一致
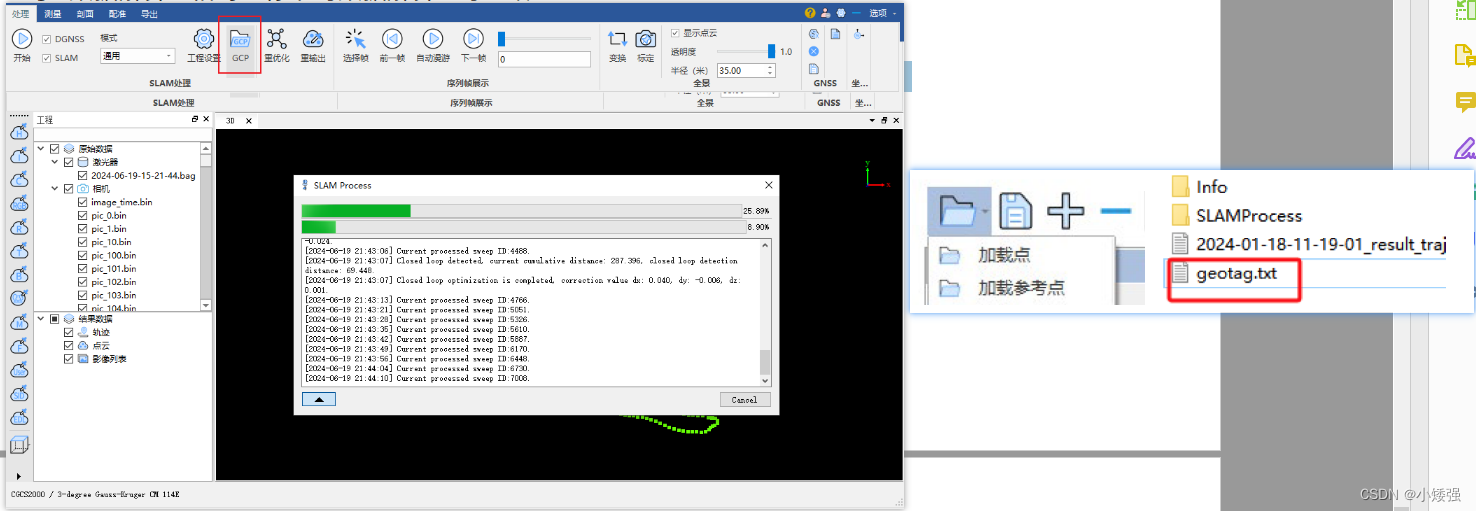
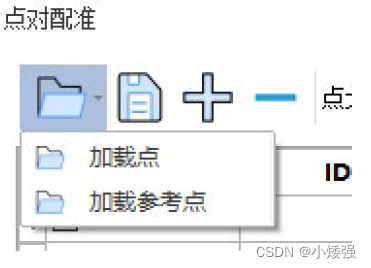
4.2 点击界面上的GCP,在点对配准界面,点击加载点,选择geotag.txt 文件。
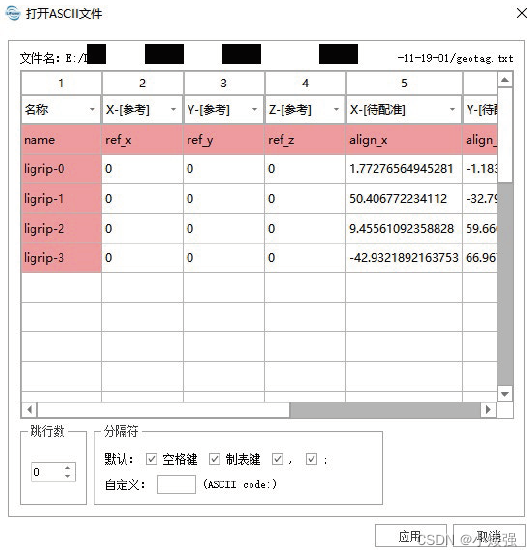
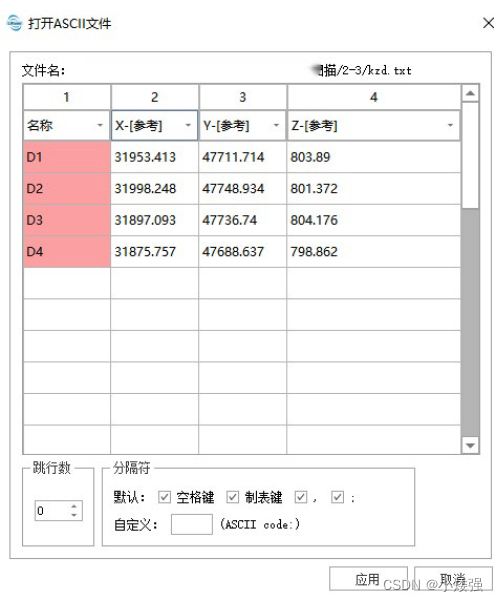
4.3 打开ASCII 文件对话框,直接点击应用
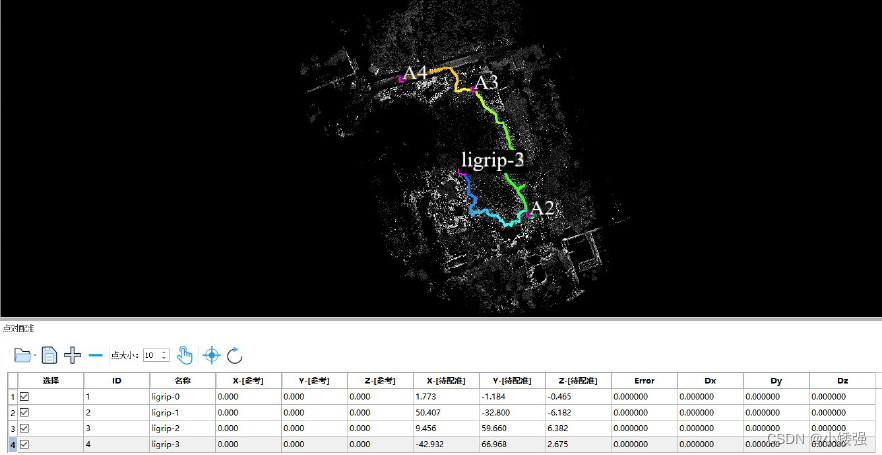
此时,界面会显示打点的位置
4.4 在点对配准界面,点击加载参考点。
配置 X Y 对应的列,注意X 对应的是东坐标,Y 对应的北坐标。点击应用
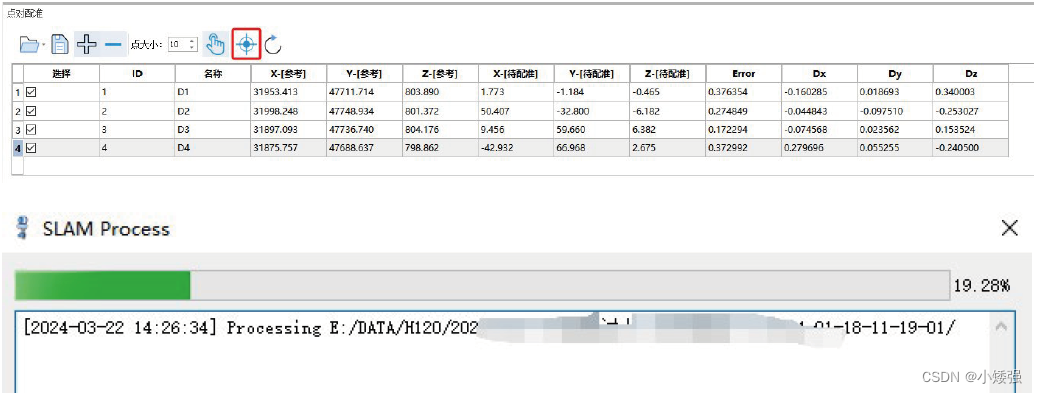
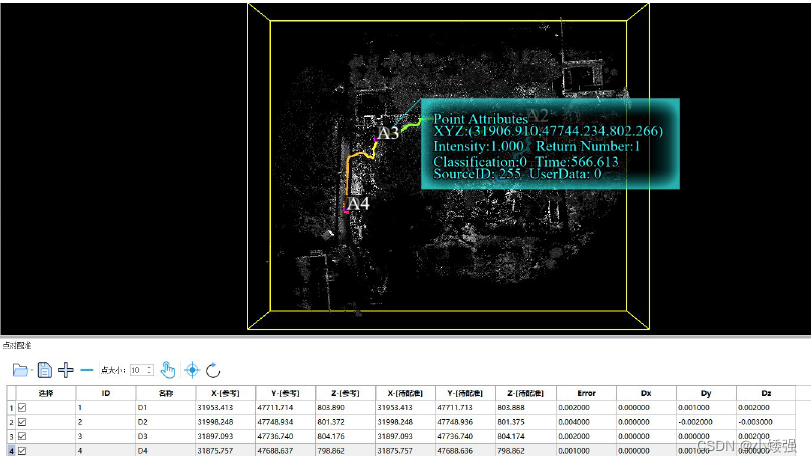
4.5 点击应用GCP 转换
最终的点云成果就与控制点的坐标是一致的了。
注意:如果GCP 转换后的效果不理想,或者控制点输入错误,可以点击如图片位置按钮,还原点云至最初的状态。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











