







1. BP神经网络ADRC
1. ADRC介绍
ADRC控制器的介绍可参考上篇博客:基于自抗扰ADRC的四旋翼无人机控制-CSDN博客
2. BP神经网络ADRC控制器结构图
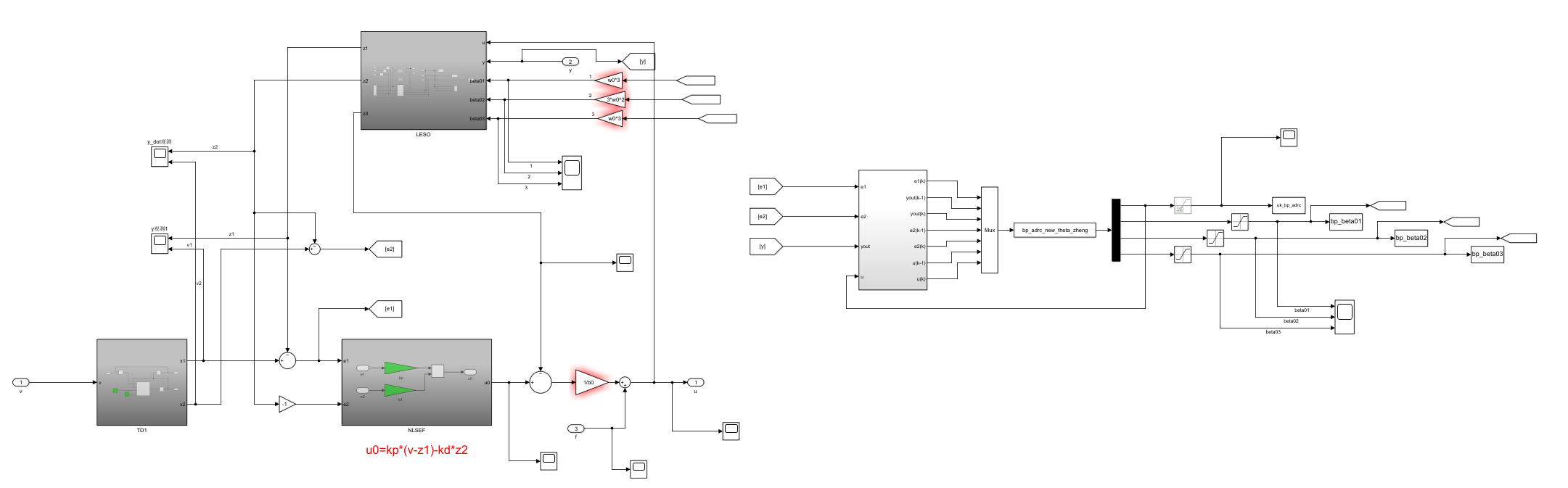
ADRC中的ESO负责估计系统状态与扰动,但是由固定参数的ESO组成的控制系统无法实现扰动变化时姿态的精确控制,因此需要不断调节ESO的参数,提升ADRC的鲁棒性。最终3个姿态角的控制器如下图,采用改进BP 神经网络在线整定ESO的参数,估计并补偿系统的内外部扰动。
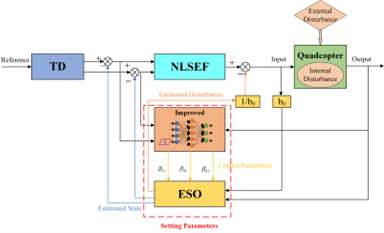
3. BP神经网络整定ESO
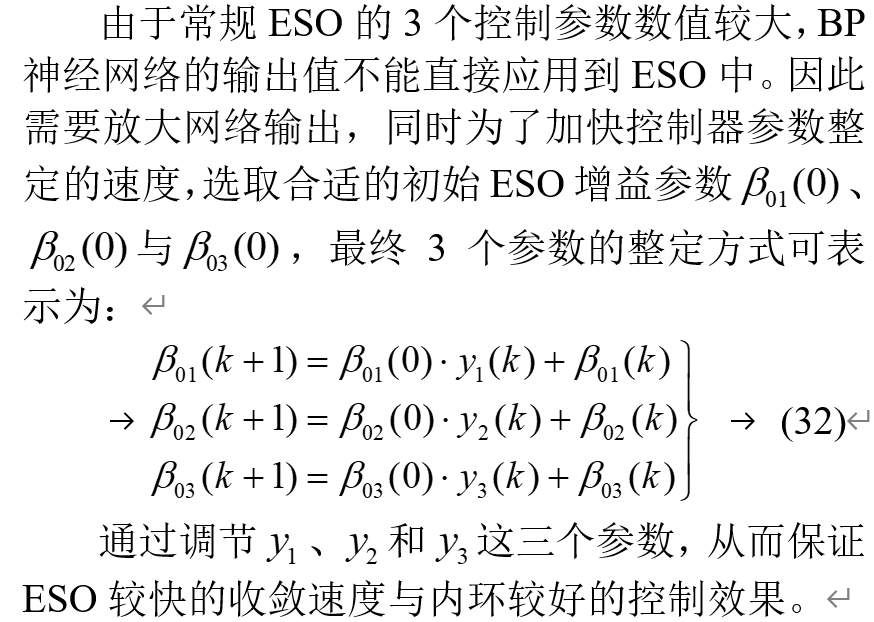
通过 BP 神经网络的学习和训练功能,按照使误差减小最快的方向分别调整隐含层到输
出层的权值、输出层的阈值、输入层到隐含层的权值以及隐含层的阈值,逐步找到某一
最优控制律下的ESO参数的修正量。
3. 仿真模型的搭建
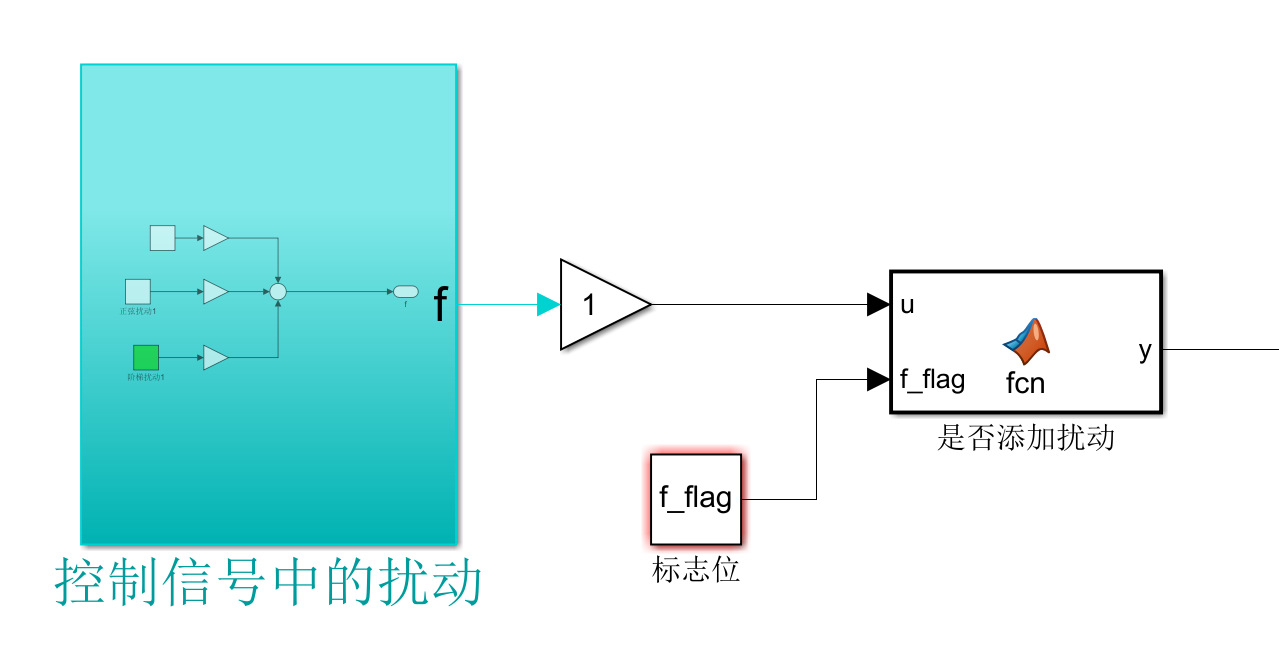
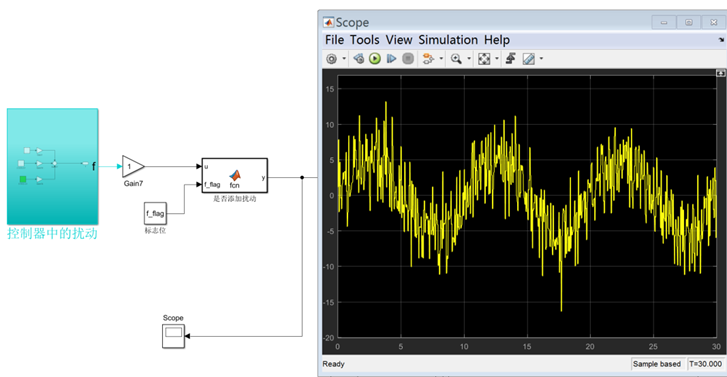
1. 添加的扰动信号
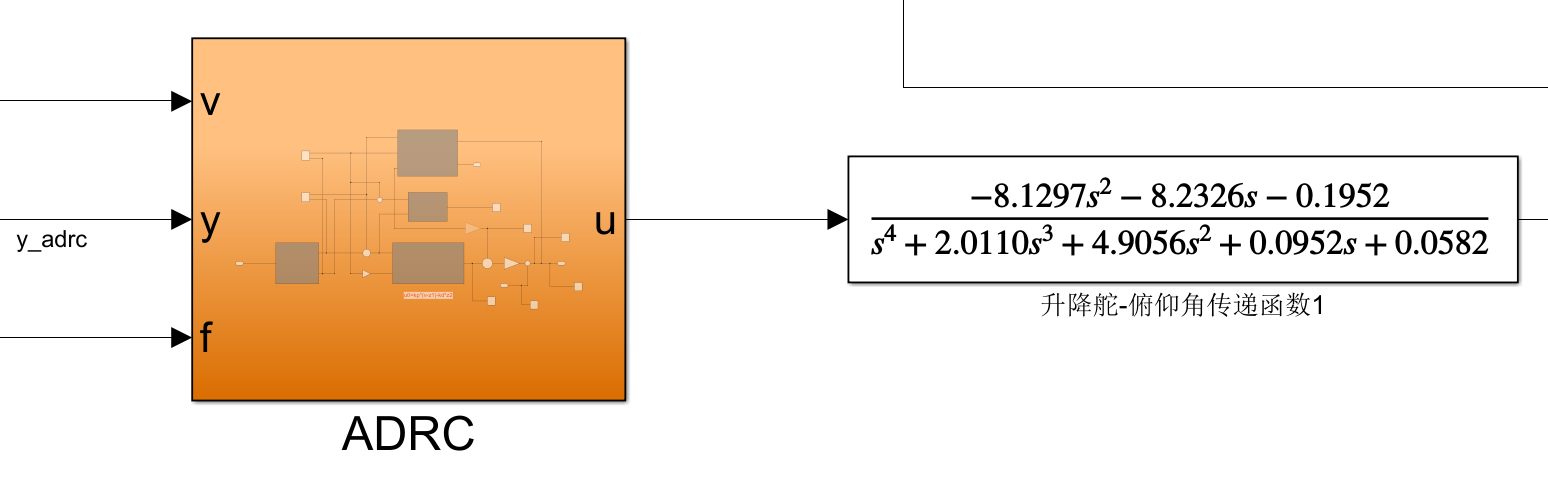
2. 控制系统的两种控制器
控制器中v为期望信号,y为输出信号,f为人为添加的干扰信号,如下图所示,控制器输出至控制对象,控制对象采用的是线性化纵向传递函数。
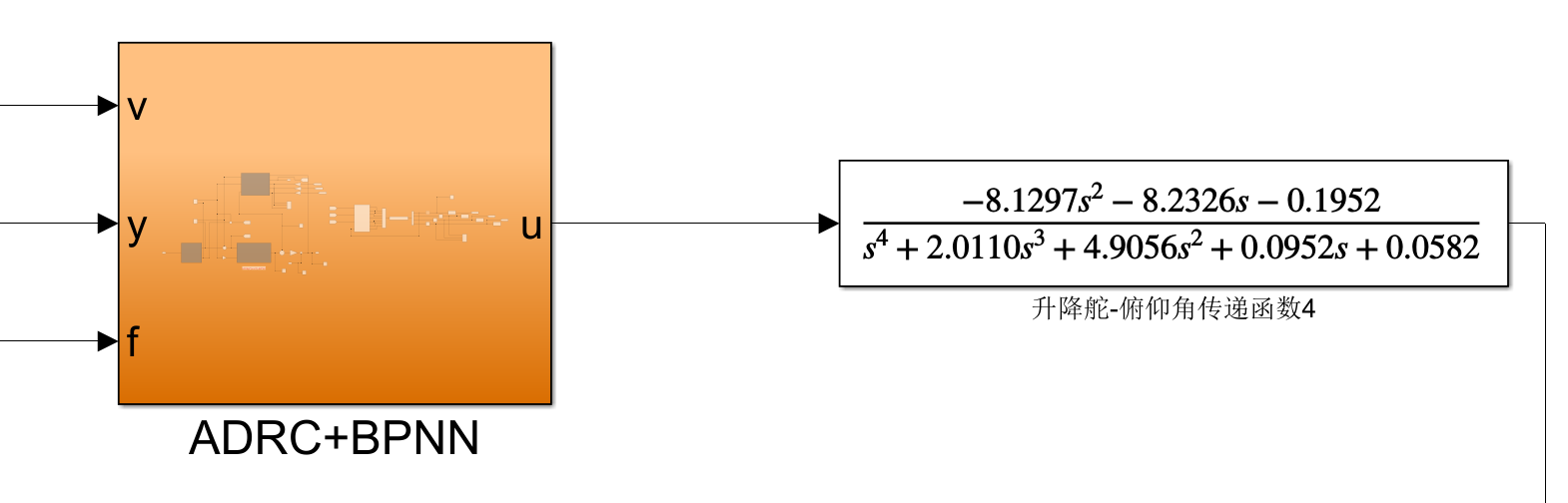
设计的BPNN-ADRC控制器内部如下:
4. 仿真结果
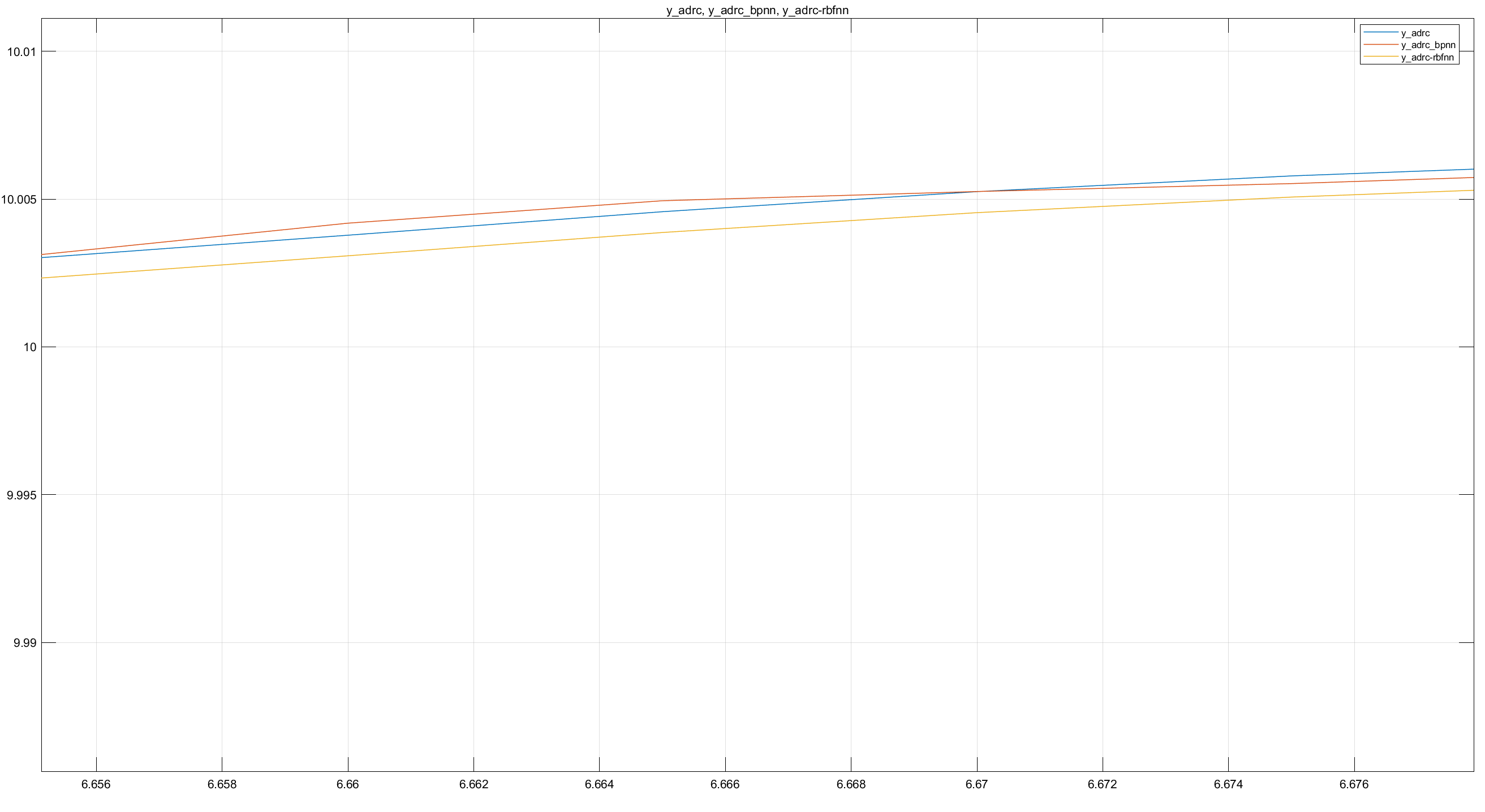
1. 添加扰动的跟踪曲线
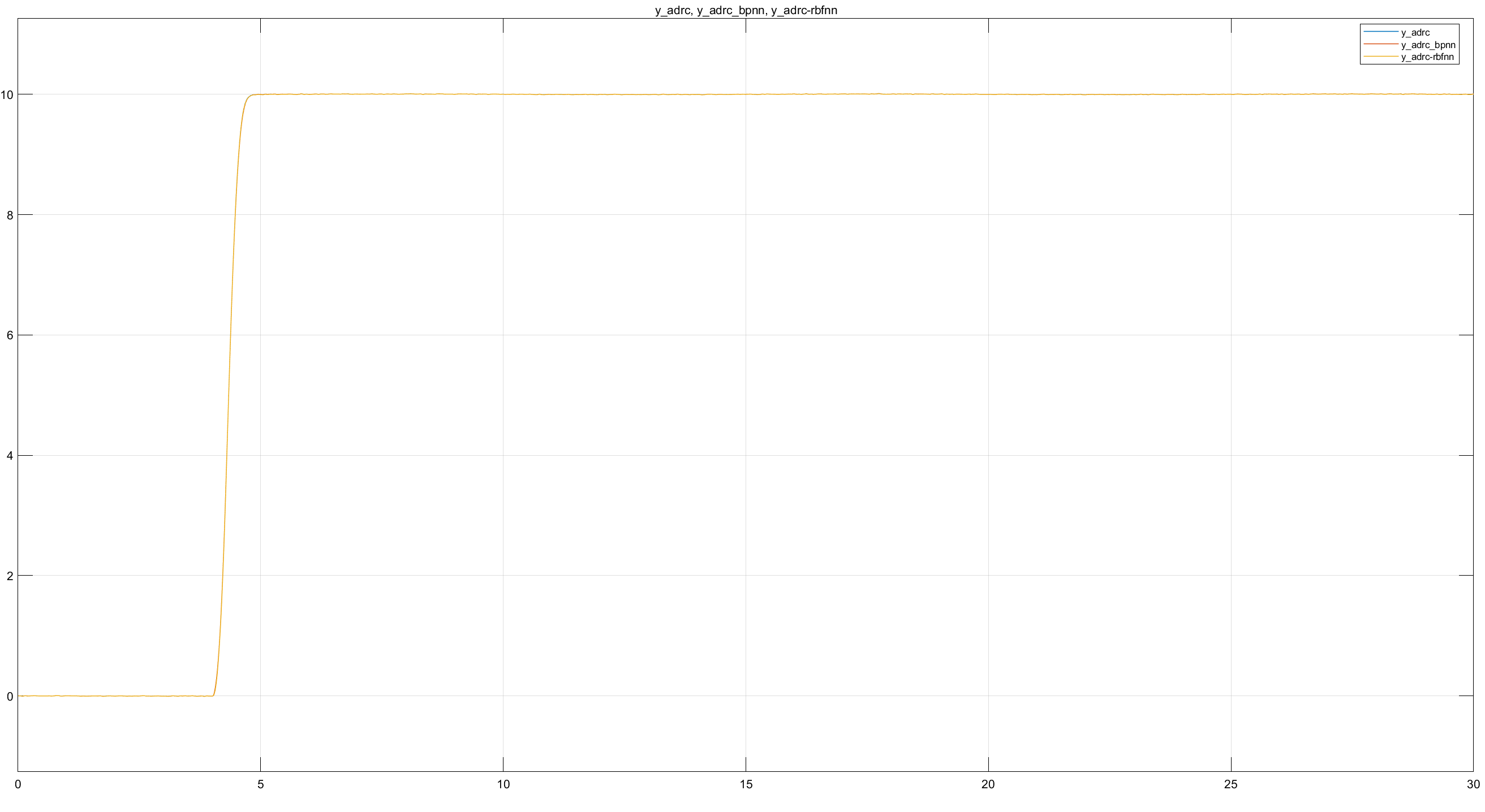
曲线局部放大图:
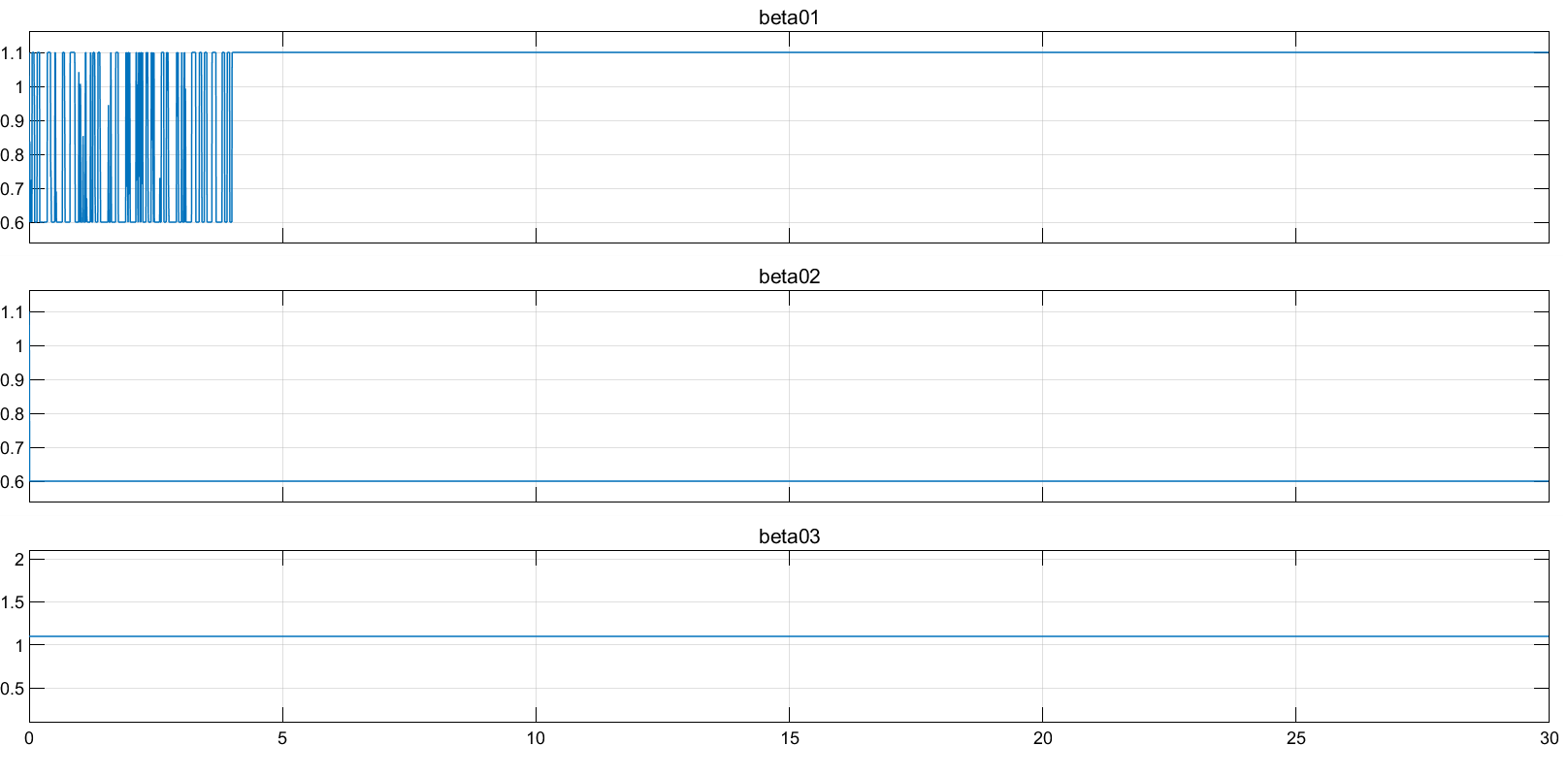
2. BPNN-ESO控制参数变化曲线
参考文献
- Research on Control of Quadrotor UAV Based on Improved BP Neural Network PID and ADRC
如需代码与讲解可私,获得方式见主页,谢绝白嫖。预告下一篇RBFNN-ADRC


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









