







写这个文章是用来学习的,记录一下我的学习过程。希望我能一直坚持下去,我只是一个小白,只是想好好学习,我知道这会很难,但我还是想去做!
本文写于:2025.03.15
前言
本次笔记是用来记录我的学习过程,同时把我需要的困难和思考记下来,有助于我的学习,同时也作为一种习惯,可以督促我学习,是一个激励自己的过程,让我们开始51单片机的学习之路。
欢迎大家给我提意见,能给我的嵌入式之旅提供方向和路线,现在作为小白,我就先学习51单片机了,就跟着B站上的江协科技开始学习了.
在这里会记录下江协科技51单片机开发板的配套视频教程所作的实验和学习笔记内容,因为我之前有一个开发板,我大概率会用我的板子模仿着来做.让我们一起加油!
另外为了增强我的学习效果:每次笔记把我不知道或者问题在后面提出来,再下一篇开头作为解答!
开发板说明
本人采用的是慧净的开发板,因为这个板子是我N年前就买的板子,索性就拿来用了。不再另外购买视频中的普中开发板了。
原理图如下

视频中的都用这个开发板来实现,如果有资源就利用起来。
仔细看了看:开发板的晶振为:11.0592Mhz;12Mhz晶振是用来给CH340G芯片外置晶振;
下图是实物图

引用
51单片机入门教程-2020版 程序全程纯手打 从零开始入门
还参考了下图中的书籍:
手把手教你学51单片机(C语言版)

解答和科普
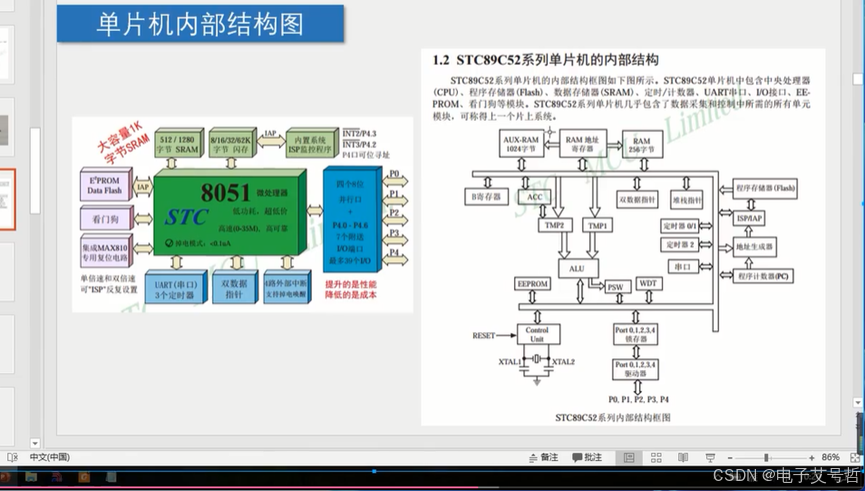
一、串口通信
通信,按照传统的理解就是信息的传输与交换。对于单片机来说,通信则与传感器、存储芯片、外围控制芯片等技术紧密结合,成为整个单片机系统的“神经中枢”。没有通信,单片机所实现的功能仅仅局限于单片机本身,就无法通过其它设备获得有用信息,也无法将自己产生的信息告诉其它设备。如果单片机通信没处理好的话,它和外围器件的合作程度就受到限制,最终整个系统也无法完成强大的功能,由此可见单片机通信技术的重要性。
UA(Universal Asynchronous Receiver/Transmitter,即通用异步收发器)串行通信是单片机最常用的一种通信技术,通常用于单片机和电脑之间以及单片机和单片机之间的通信。

通信按照基本类型可以分为并行通信和串行通信。并行通信时数据的各个位同时传送,可以实现字节为单位通信,但是通信线多占用资源多,成本高。比如我们前边用到的P0 = 0xFE;一次给P0 的8 个IO 口分别赋值,同时进行信号输出,类似于有8 个车道同时可以过去8 辆车一样,这种形式就是并行的,我们习惯上还称P0、P1、P2 和P3 为51 单片机的4 组并行总线。
而串行通信,就如同一条车道,一次只能一辆车过去,如果一个0xFE 这样一个字节的
数据要传输过去的话,假如低位在前高位在后的话,那发送方式就是0-1-1-1-1-1-1-1-1,一位一位的发送出去的,要发送8 次才能发送完一个字节。
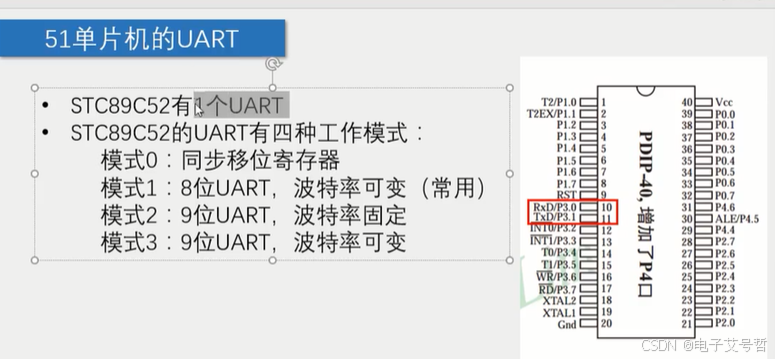
STC89C52 有两个引脚是专门用来做UART 串行通信的,一个是P3.0 一个是P3.1,它们
还分别有另外的名字叫做RXD 和TXD,由它们组成的通信接口就叫做串行接口,简称串口。用两个单片机进行UART 串口通信,基本的演示图。
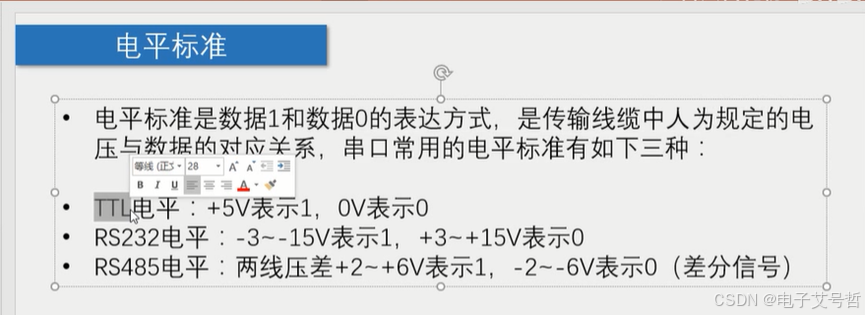
差分信号:两线压差,A-B 两个互相比较,完成一个线,CAN,USB, 485 1000m之上;
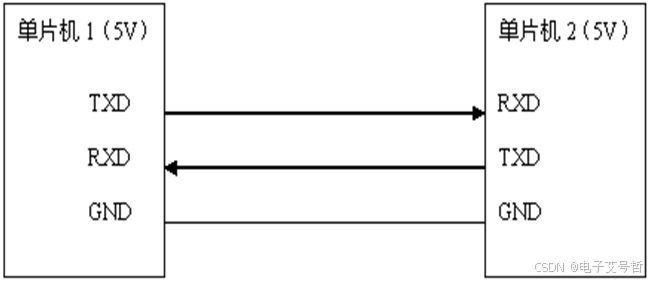
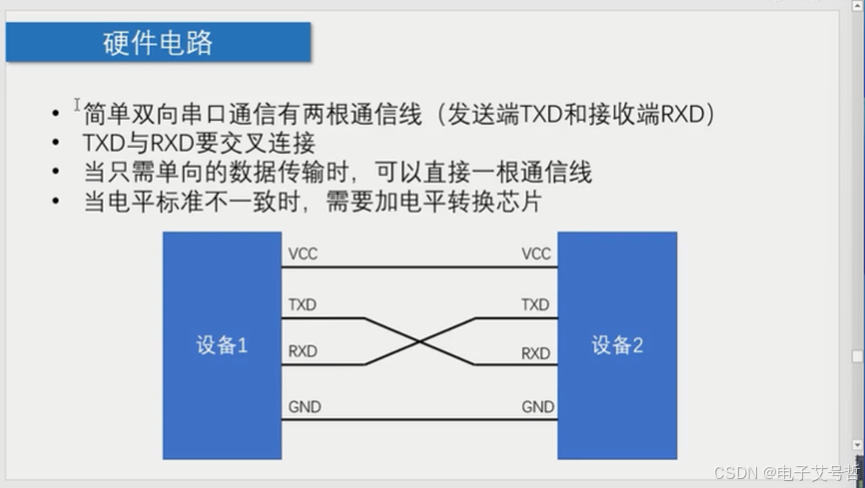
图中,GND 表示单片机系统电源的参考地,TXD 是串行发送引脚,RXD 是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的GND 相互
连接起来,然后单片机1 的TXD 引脚接到单片机2 的RXD 引脚上,即此路为单片机1 发送
而单片机2 接收的通道,单片机1 的RXD 引脚接到单片机2 的TXD 引脚上,即此路为单片
机2 发送而单片机1 接收的通道。这个示意图就体现了两个单片机相互收发信息的过程。
当单片机1 想给单片机2 发送数据时,比如发送一个0xE4 这个数据,用二进制形式表
示就是0b11100100,在UART 通信过程中,是低位先发,高位后发的原则,那么就让TXD
首先拉低电平,持续一段时间,发送一位0,然后继续拉低,再持续一段时间,又发送了一
位0,然后拉高电平,持续一段时间,发了一位1……一直到把8 位二进制数字0b11100100
全部发送完毕,这里就涉及到了一个问题,就是持续的这“一段时间”到底是多久?由此便引入了通信中的一个重要概念——波特率,也叫做比特率。
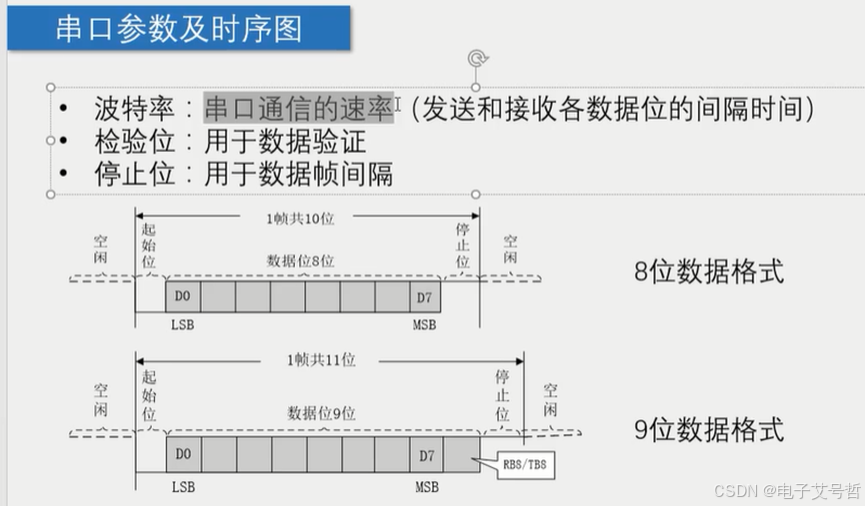
波特率就是发送二进制数据位的速率,习惯上用baud 表示,即我们发送一位二进制数据
的持续时间=1/baud。在通信之前,单片机1 和单片机2 首先都要明确的约定好它们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。
约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?
不管是提前接收还是延迟接收,数据都会接收错误。在UART 通信的时候,一个字节是8 位,
规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位0 表示起
始位,然后发送8 位数据位,数据位是先低后高的顺序,数据位发完后再发一位1 表示停止
位。这样本来要发送一个字节的8 位数据,而实际上我们一共发送了10 位,多出来的两位
其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到了一位低
电平,那就知道了要开始准备接收数据了,接收到8 位数据位后,然后检测到停止位,再准
备下一个数据的接收。我们图示看一下,如图所示。
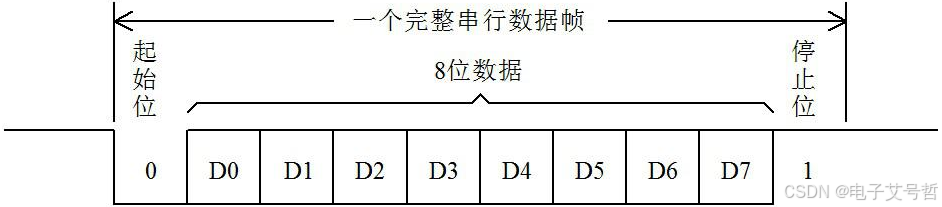
上图 串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒,如果能够理解时域的概念,后边很多通信的时序图就很容易理解
了。
比特率:传输多少个位;
奇偶检验:都约定奇校验,0000 0011 1;0000 0011 1;
1110 0000 0;1100 0000 0;
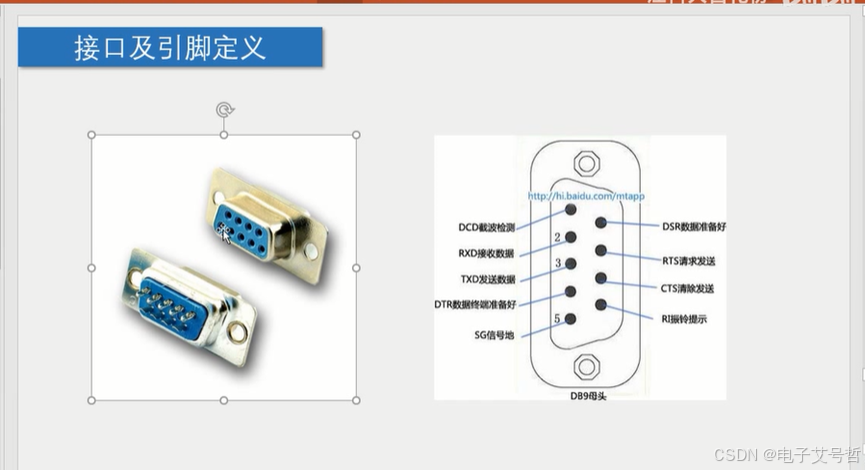
RS232 通信接口
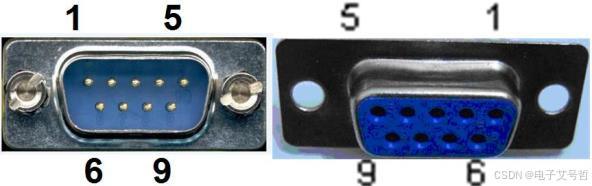
RS232 接口一共有9 个引脚,分别定义是:1、载波检测DCD;2、接收数据RXD;3、发送数据TXD;4、数据终端准备好DTR;5、信号地线SG;6、数据准备好DSR;7、请求发送RTS;8、清除发送CTS;9、振铃提示RI。我们要让这个串口和我们单片机进行通信,我们只需要关心其中的2 脚RXD、3 脚TXD 和5 脚GND 即可。
我们得慢慢知道,不是所有的电路都是5V 代表高电平而0V 代表低电平的。对于RS232 标准来说,它是个反逻辑,也叫做负逻辑。为何叫负逻辑?它的TXD 和RXD 的电压,-3V~-15V 电压代表是1,+3~+15V 电压代表是0。低电平代表的是1,而高电平代表的是0,所以称之为负逻辑。因此电脑的9 针RS232串口是不能和单片机直接连接的,需要用一个电平转换芯片MAX232 来完成。
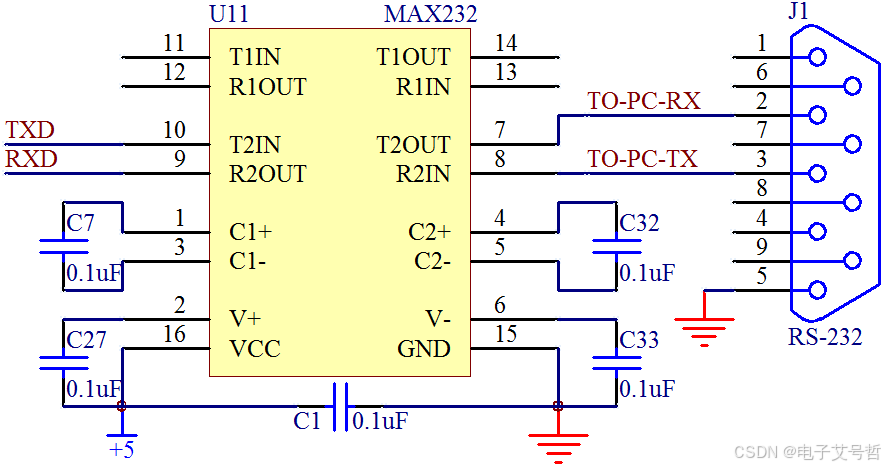
这个芯片就可以实现把标准RS232 串口电平转换成我们单片机能够识别和承受的UART
0V/5V 电平。从这里大家似乎慢慢有点明白了,其实RS232 串口和UART 串口,它们的协议类型是一样的,只是电平标准不同而已,而MAX232 这个芯片起到的就是中间人的作用,它把UART 电平转换成RS232 电平,也把RS232 电平转换成UART 电平,从而实现标准RS232接口和单片机UART 之间的通信连接。
USB 转串口通信
我们只需要在电路上添加一个USB 转串口芯片,就可以成功实现USB 通信协议和标准
UART 串行通信协议的转换,在我们的开发板上,我们使用的是CH340T 这个芯片
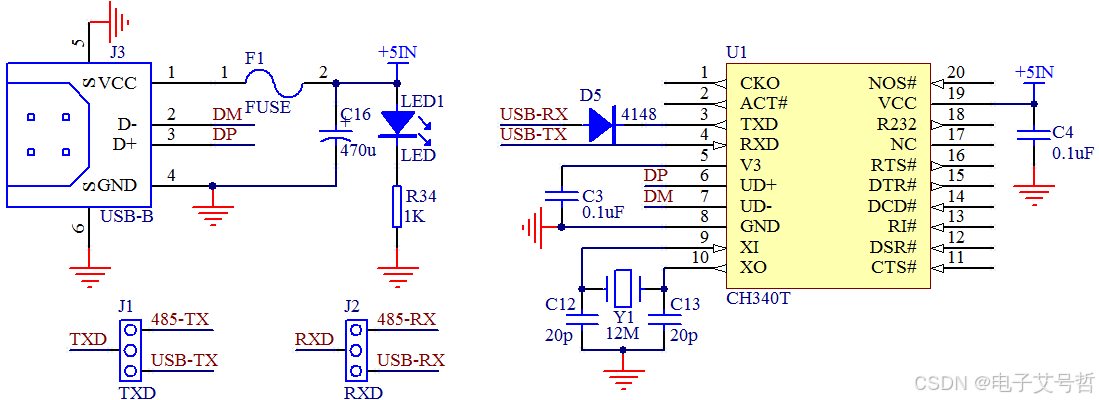
图中左下方J1 和J2 是两个跳线的组合,大家可以在我们板子左下方的位置找到,我们需要用跳线帽把中间和下边的针短接在一起。右侧的CH340T 这个电路很简单,把电源、晶振接好后,6 脚和7 脚的DP 和DM 分别接USB 口的2 个数据引脚上去,3 脚和4 脚通过跳线接到了我们单片机的TXD 和RXD 上去。
CH340T 的电路里3 脚位置加了个4148 的二极管,是一个小技巧。因为STC89C52 这个
单片机下载程序时需要冷启动,就是先点下载后上电,上电瞬间单片机会先检测需要不需要
下载程序。虽然单片机的VCC 是由开关来控制,但是由于CH340T 的3 脚是输出引脚,如
果没有此二极管,开关后级单片机在断电的情况下,CH340T 的3 脚和单片机的P3.0(即RXD)引脚连在一起,有电流会通过这个引脚流入后级电路并且给后级的电容充电,造成后级有一定幅度的电压,这个电压值虽然只有两三伏左右,但是可能会影响到正常的冷启动。加了二极管后,一方面不影响通信,另外一个方面还可以消除这种不良影响。这个地方可以暂时作为了解,大家如果自己做这类电路,可以参考一下。

二、IO 口模拟UART 串口通信
为了让大家充分理解UART 串口通信的原理,我们先把P3.0 和P3.1 当做IO 口来进行模拟实际串口通信的过程,原理搞懂后,我们再使用寄存器配置实现串口通信过程。对于UART 串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200 等速率。IO 口模拟UART 串行通信程序是一个简单的演示程序,我们使用串口调试助手下发一个数据,数据加1 后,再自动返回。
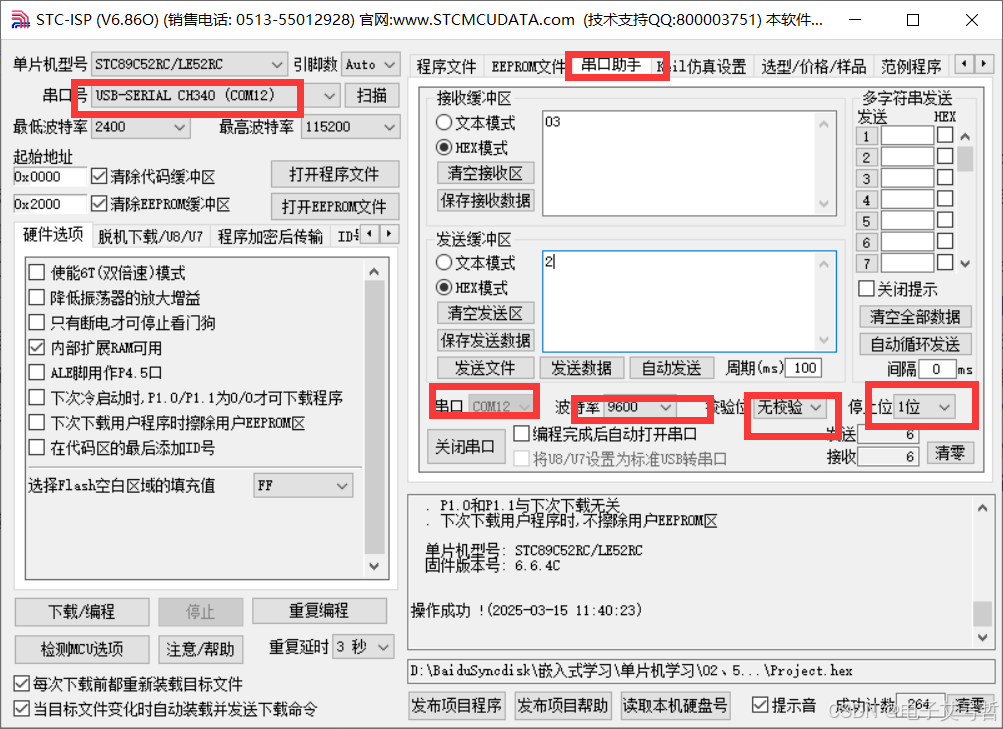
串口调试助手,这里我们直接使用STC-ISP 软件自带的串口调试助手,先把串口调试助
手的使用给大家说一下,如图 所示。第一步要选择串口助手菜单,第二步选择十六进制显示,第三步选择十六进制发送,第四步选择COM 口,这个COM 口要和自己电脑设备管理器里的那个COM 口一致,波特率按我们程序设定好的选择,我们程序中让一个数据位持续时间是1/9600 秒,那这个地方选择波特率就是选9600,校验位选N,数据位8,停止位1。
串口调试助手的实质就是利用电脑上的UART 通信接口,发送数据给我们的单片机,也
可以把我们的单片机发送的数据接收到这个调试助手界面上。
变量定义部分就不用说了,直接看main 主函数。首先是对通信的波特率的设定,在这里我们配置的波特率是9600,那么串口调试助手也得是9600。配置波特率的时候,我们用的是定时器T0 的模式2。模式2 中,不再是TH0 代表高8 位,TL0 代表低8 位了,而只有TL0 在进行计数,当TL0 溢出后,不仅仅会让TF0 变1,而且还会将TH0 中的内容重新自动装到TL0 中。这样有一个好处,就是我们可以把想要的定时器初值提前存在TH0 中,当TL0溢出后,TH0 自动把初值就重新送入TL0 了,全自动的,不需要程序中再给TL0 重新赋值了,配置方式很简单,大家可以自己看下程序并且计算一下初值。
波特率设置好以后,打开中断,然后等待接收串口调试助手下发的数据。接收数据的时
候,首先要进行低电平检测while (PIN_RXD),若没有低电平则说明没有数据,一旦检测到
低电平,就进入启动接收函数StartRXD()。接收函数最开始启动半个波特率周期,初学可能
这里不是很明白。大家回头看一下我们的图11-2 里边的串口数据示意图,如果在数据位电平变化的时候去读取,因为时序上的误差以及信号稳定性的问题很容易读错数据,所以我们希望在信号最稳定的时候去读数据。除了信号变化的那个沿的位置外,其它位置都很稳定,那么我们现在就约定在信号中间位置去读取电平状态,这样能够保证我们读的一定是正确的。
一旦读到了起始信号,我们就把当前状态设定成接收状态,并且打开定时器中断,第一次是半个周期进入中断后,对起始位进行二次判断一下,确认一下起始位是低电平,而不是一个干扰信号。以后每经过1/9600 秒进入一次中断,并且把这个引脚的状态读到RxdBuf 里边。等待接收完毕之后,我们再把这个RxdBuf 加1,再通过TXD 引脚发送出去,同样需要先发一位起始位,然后发8 个数据位,再发结束位,发送完毕后,程序运行到while (PIN_RXD),等待第二轮信号接收的开始。
#include <REGX52.H>
#include <INTRINS.H>
#include "Delay.h"
sbit PIN_RXD =P3^0 ; //接收引脚定义
sbit PIN_TXD=P3^1; //发送引脚定义
bit RxdOrTxd =0; //指示当前状态为接收还是发送
bit RxdEnd=0; //接收结束标志
bit TxdEnd=0; //发送结束标志
unsigned char RxdBuf=0; //接收缓冲器
unsigned char TxdBuf=0; //发送缓冲器
void ConfigUART(unsigned int baud);
void StartTXD(unsigned char dat);
void StartRXD();
void main()
{
EA=1; //开总中断
ConfigUART(9600); //配置波特率为9600
while(1)
{
while(PIN_RXD); //等待接受引脚出现低电平,即起始位
StartRXD(); // 启动接收
while(!RxdEnd); //等待接收完成
StartTXD(RxdBuf+1); //接收到的数据+1后,发送回去
while(!TxdEnd); //等待发送完成
}
}
//串口配置函数
void ConfigUART(unsigned int baud)
{
TMOD&=0xF0;//清零TO的控制位
TMOD|=0x02;//配置T0为模式2
TH0=256-(11059200/12)/baud;
}
//启动串行接受
void StartRXD()
{
TL0=256-((256-TH0)>>1); //接收启动时的T0定时为半个波特率周期
ET0=1; //使能T0中断
TR0=1; //启动T0
RxdEnd=0; //清零接收结束标志
RxdOrTxd=0; //设置当前状态为接收
}
//启动串行发送,dat——待发送字节数据
void StartTXD(unsigned char dat)
{
TxdBuf=dat; //待发送数据保存到发送缓冲器
TL0=TH0; //T0计数初值为重载值
ET0=1; //使能T0中断
TR0=1; //启动T0
PIN_TXD=0; //发送起始位
TxdEnd=0; //清零发送结束标志
RxdOrTxd=1; //设置当前状态为发送
}
//T0中断服务函数,处理串行发送和接受
void Timer0_Routine() interrupt 1 //跳转到这里,触发中断
{
static unsigned char cnt=0; //位接收或发送计数
if(RxdOrTxd) //串行发送处理
{
cnt++;
if(cnt<=8) //低位在先依次发送8bit数据位
{
PIN_TXD=TxdBuf&0x01;
TxdBuf>>=1;
}
else if(cnt==9) //发送停止位
{
PIN_TXD=1;
}
else //发送结束
{
cnt=0; //复位bit计数器
TR0=0; //关闭T0
TxdEnd=1;//置发送结束标志
}
}
else //串行接受处理
{
if(cnt==0) //处理起始位
{
if(!PIN_RXD) //起始位为0时,清零接收缓冲器,准备接收数据位
{
RxdBuf=0;
cnt++;
}
else //起始位不为0时,中止接受
{
TR0=0; //关闭T0
}
}
else if(cnt<=8) //处理8位数据位
{
RxdBuf>>=1; //低位在先,所以将之前接收的位向右移
if(PIN_RXD) //接受脚为1时,缓冲器最高位置1,
{
RxdBuf |=0x80;
}
cnt++;
}
else //停止位处理
{
cnt=0; //复位bit计数器
TR0=0; //关闭T0
if(PIN_RXD) //停止位为1时,方能认为数据有效
{
RxdEnd=1; // 置接收结束标志
}
}
}
}
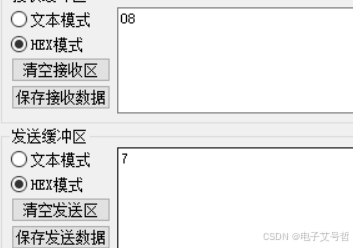
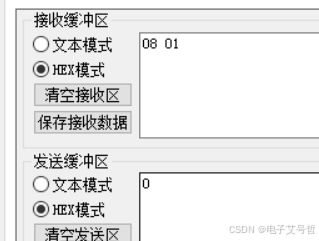
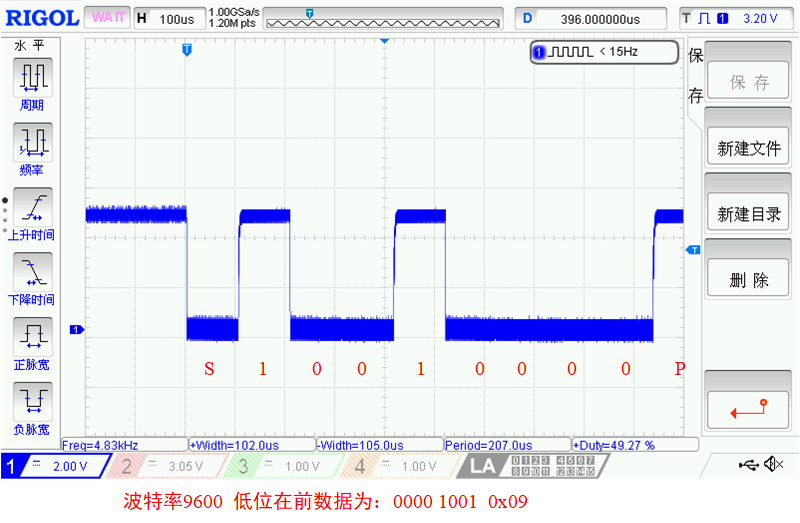
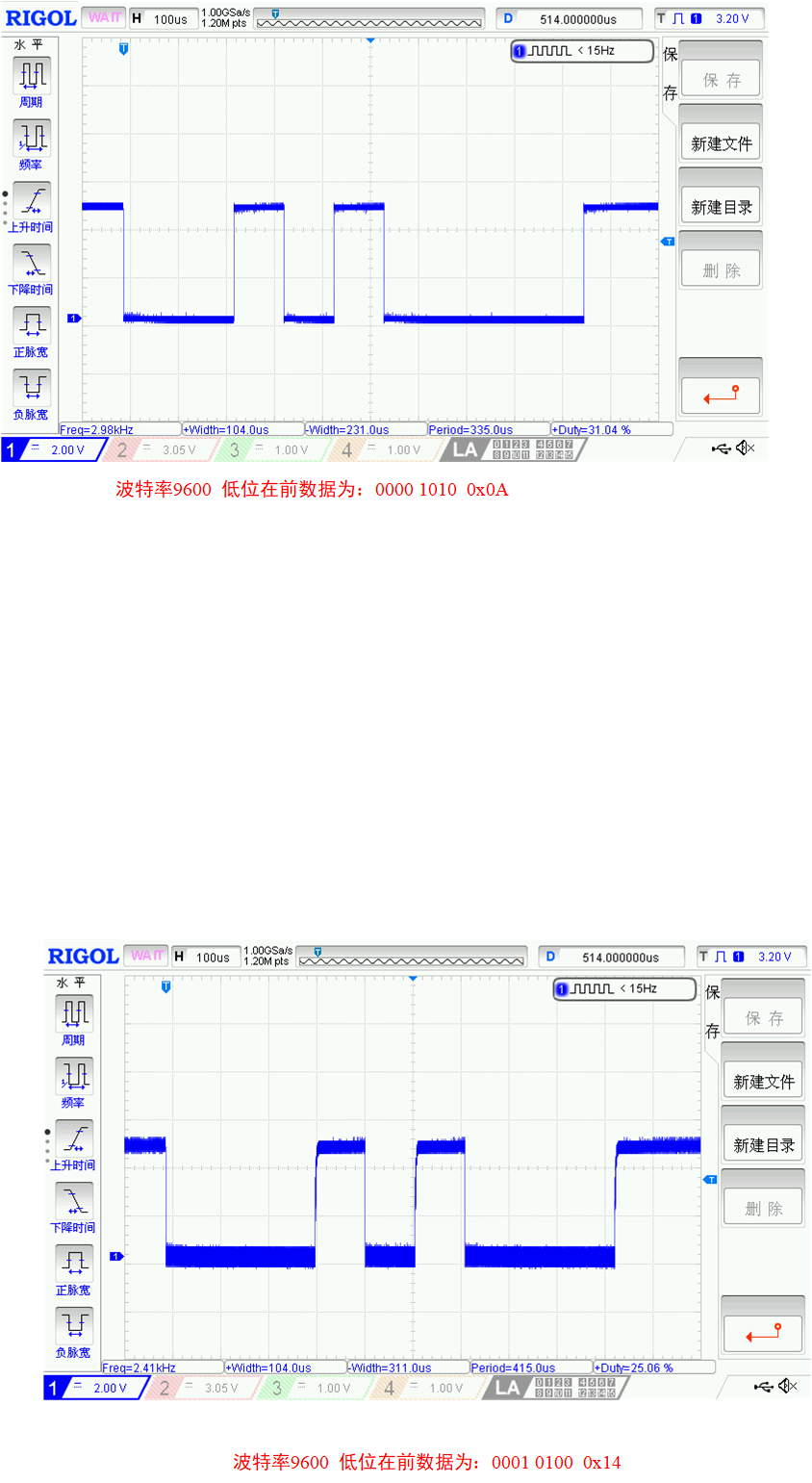
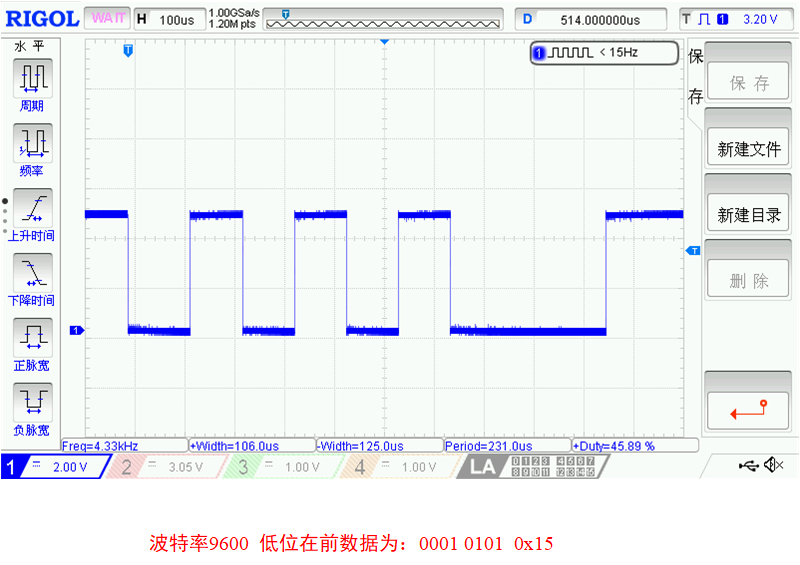
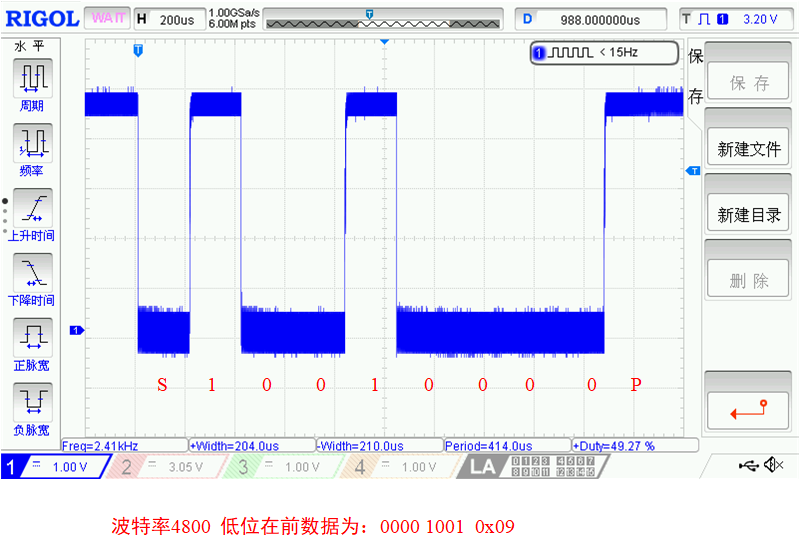
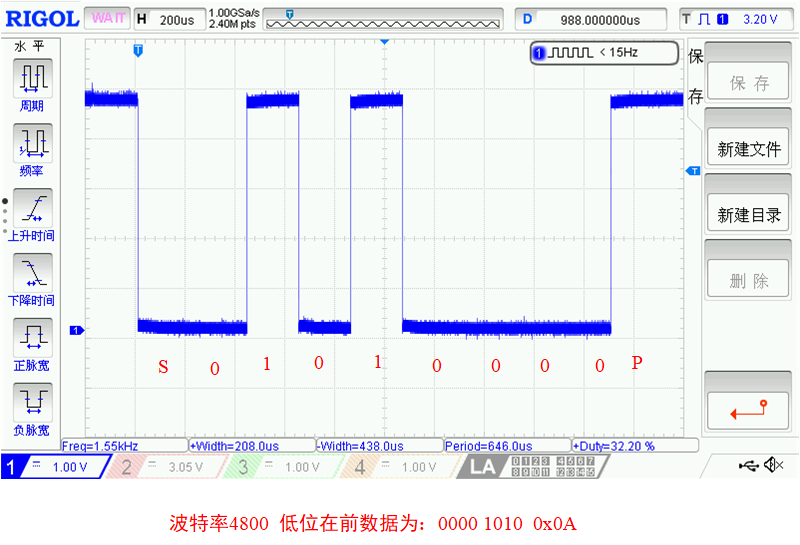
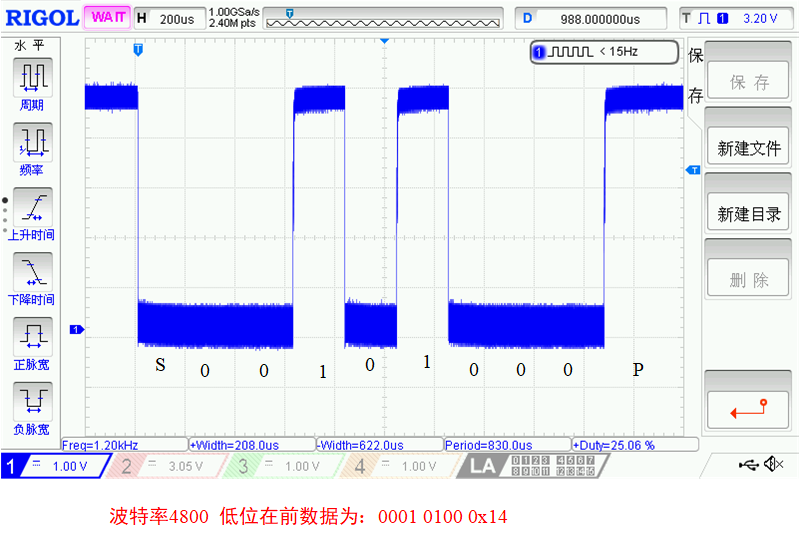
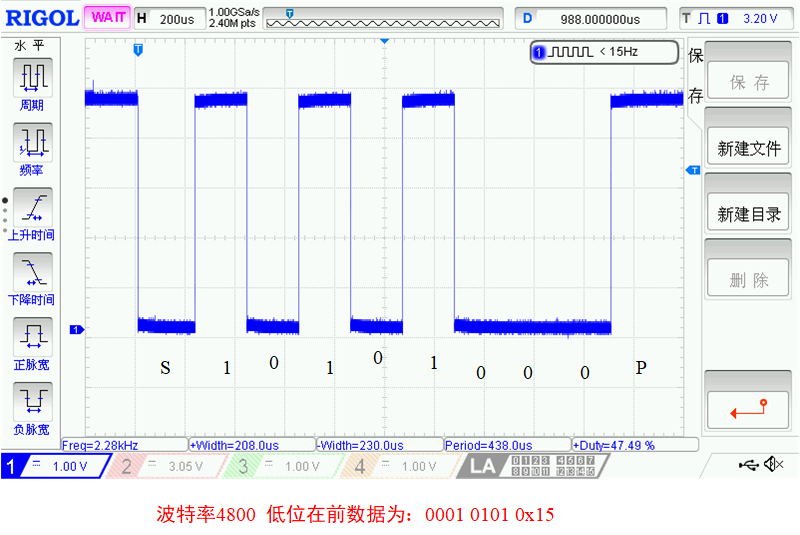
实验现象:
问题
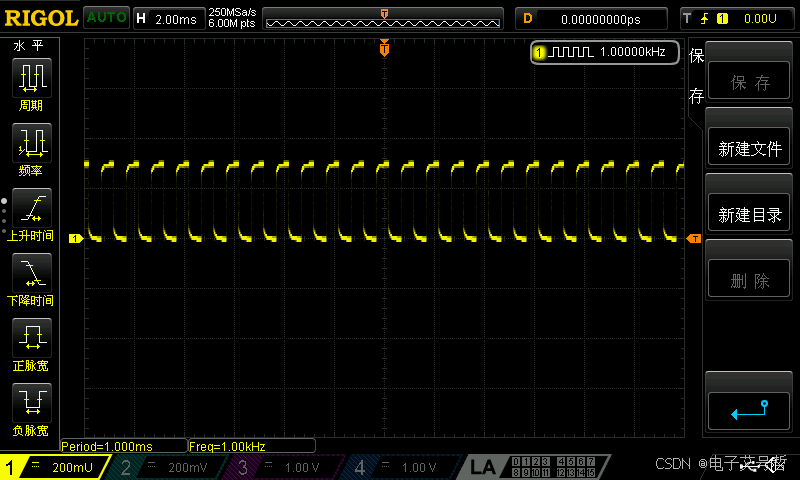
1、咱也是用上示波器了,哈哈。
9600
发送:9
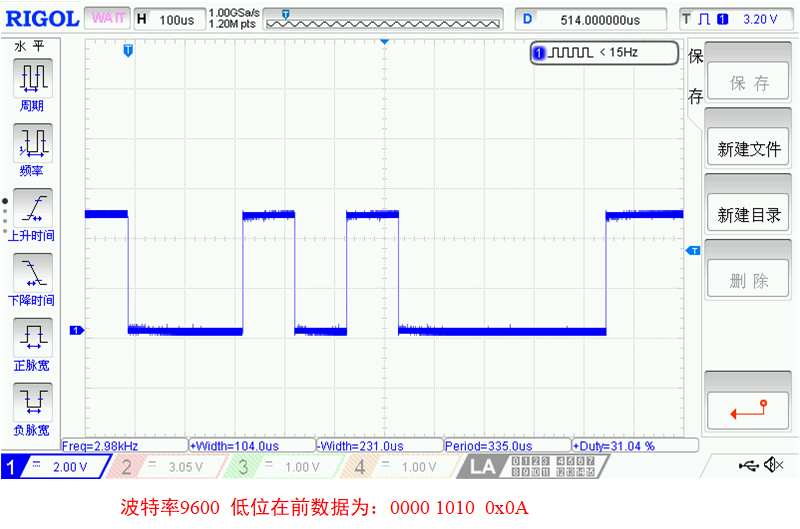
发送:0x14
4800
发送:0x09
总结
本节课主要学了串口通信,并简单的用电脑的串口助手完成了单片机把发送的数据+1给返回过了。
1、串口通信的简单介绍
2、串口通信的类型和分类,注意电平协议,不同的需要转换
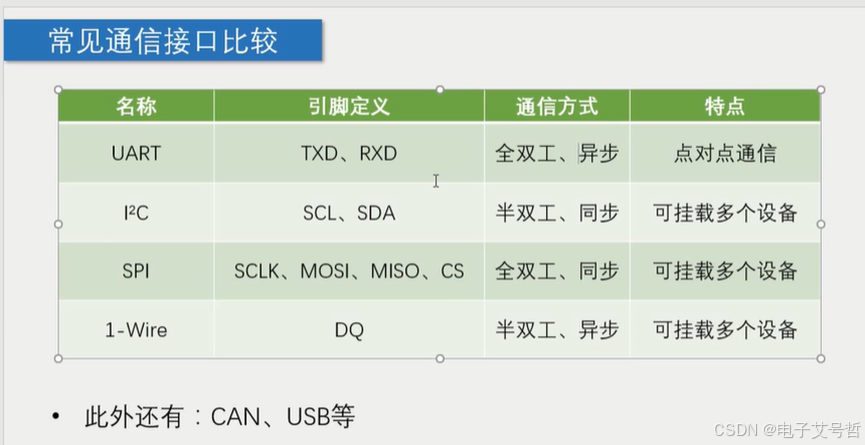
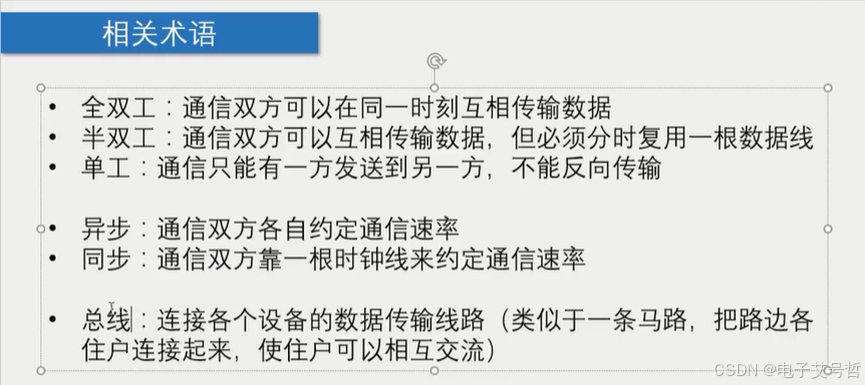
3、常用的通信从传输方向上可以分为单工通信、半双工通信、全双工通信三类。
4、RS232 通信接口,USB 转串口通信,IO 口模拟UART 串口通信。
鸡汤时刻

珍惜当下的时间,永远要有勇气,永远要保持活力。

















 3135
3135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









