







无论是二维还是三维空间的直线方程,它们都是用来描述满足特定条件的所有点的集合,即直线的轨迹。虽然两者都描述直线,但二维空间直线方程更多地与平面几何相关,表示平面内满足某一条件的所有点的集合。而三维空间直线方程则与立体几何相关,表示空间中满足某一条件的所有点的轨迹,具有更复杂的几何意义。
在二维空间中,直线方程除了一般方程外,还有参数方程、斜截式。而在三维空间中,由于坐标轴的增多,其表示形式也更多,其中参数方程形式更为常用和直观。
HighLight
| 表示方法 | 核心公式 |
|---|---|
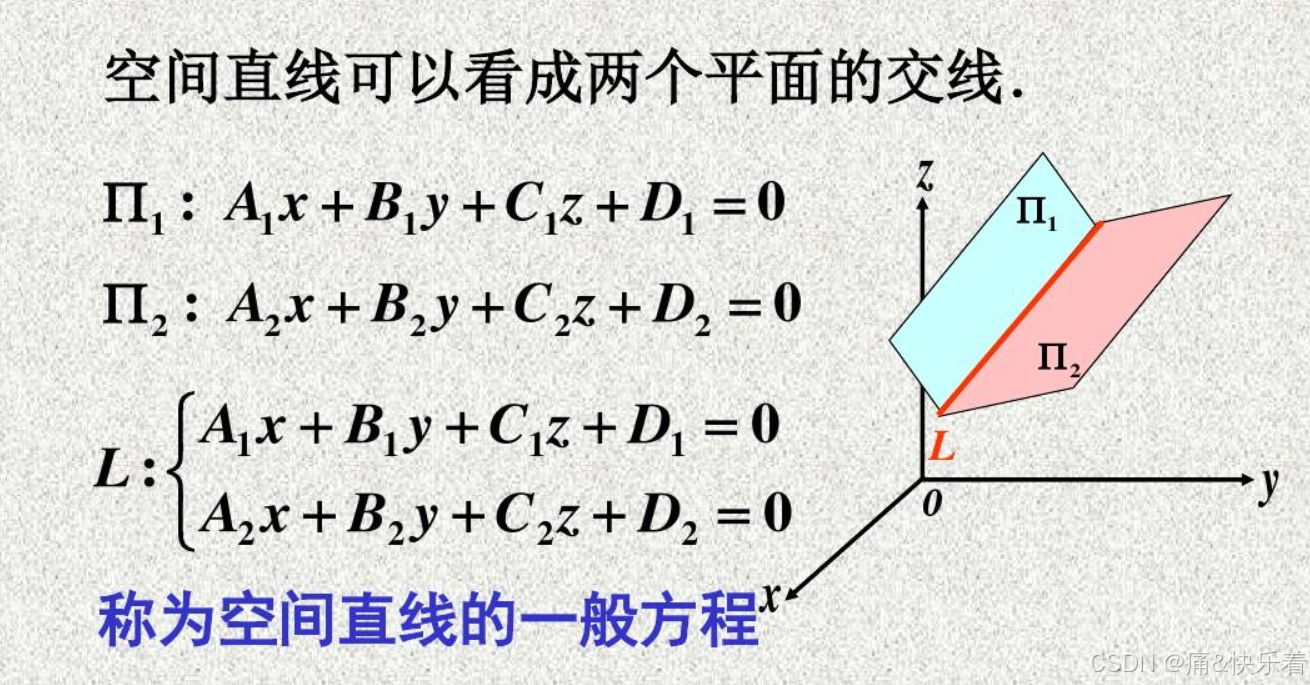
| 一般方程 | A 1 x + B 1 y + C 1 z + D 1 = 0 , A 2 x + B 2 y + C 2 z + D 2 = 0. \begin{array}{c}A_1x + B_1y + C_1z + D_1 = 0, \\A_2x + B_2y + C_2z + D_2 = 0.\end{array} A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0. |
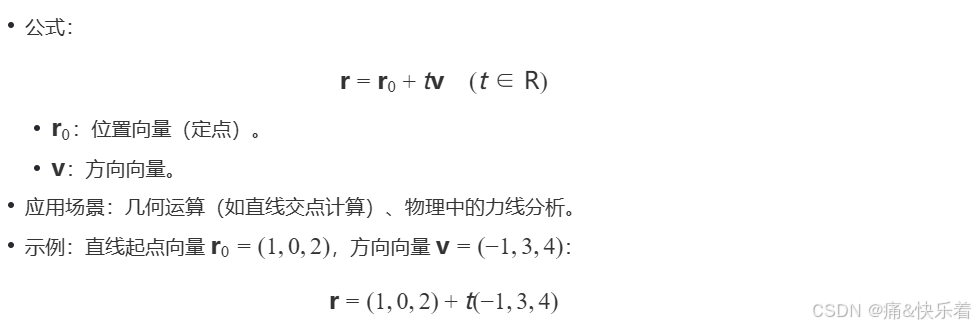
| 参数方程 | r = r 0 + t v \mathbf{r} =\mathbf{r_0}+t\mathbf{v} r=r0+tv |
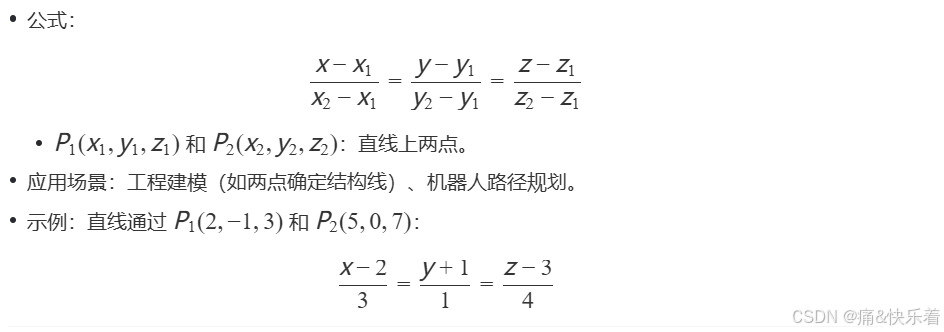
| 对称式 | x − x 0 a = y − y 0 b = z − z 0 c \frac{x-x_0}{a}=\frac{y-y_0}{b}=\frac{z-z_0}{c} ax−x0=by−y0=cz−z0 |
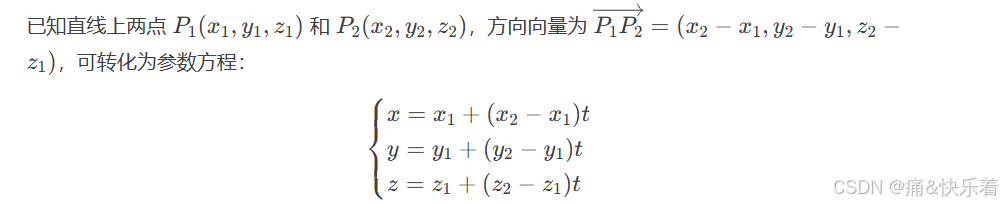
| 两点式 | x − x 1 x 2 − x 1 = y − y 1 y 2 − y 1 = z − z 1 z 2 − z 1 \frac{x-x_1}{x_2-x_1}=\frac{y-y_1}{y_2-y_1}=\frac{z-z_1}{z_2-z_1} x2−x1x−x1=y2−y1y−y1=z2−z1z−z1 |
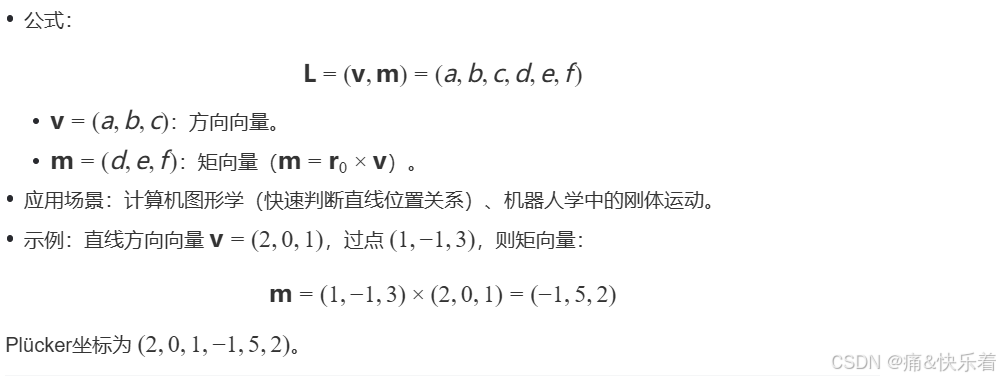
| Plücker坐标 | L = ( v , r 0 × v ) \mathbf{L}=(\mathbf{v},\mathbf{r_0}\times\mathbf{v}) L=(v,r0×v) |
应用
动态分析:参数方程或向量式。
几何直观:对称式或两点式。
高效计算:Plücker坐标。
1. 参数方程(向量形式)
由直线上一点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)和方向向量 v = ( a , b , c ) \mathbf{v}=(a,b,c) v=(a,b,c)确定,形式为:
{
x
=
x
0
+
a
t
y
=
y
0
+
b
t
z
=
z
0
+
c
t
\begin{cases} x = x_0 + at \\ y = y_0 + bt \\ z = z_0 + ct \end{cases}
⎩
⎨
⎧x=x0+aty=y0+btz=z0+ct
2. 对称式方程(点向式)

3. 一般方程(两平面交线)

4. 两点式方程
也可以作如下表示:
5. Plücker坐标(高级方法)

注意事项:
对称式方程需处理分母为零的情况(如固定坐标分量)。
交面式方程需确保两平面确实相交于一条直线,而非平行或重合。
参数方程和两点式本质相同,均通过方向向量参数化直线。
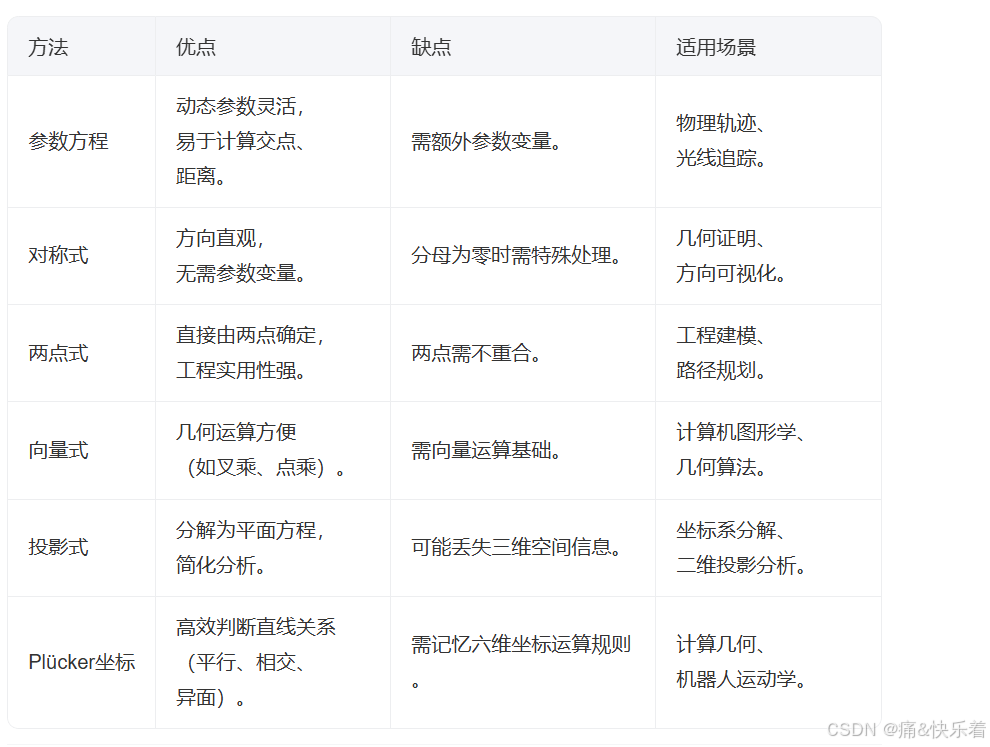
这些方法在不同场景下各有优势,参数方程便于生成点,对称式直观,交面式适合代数分析,而Plücker坐标适用于几何计算。
6. 方法对比与选择建议

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









