






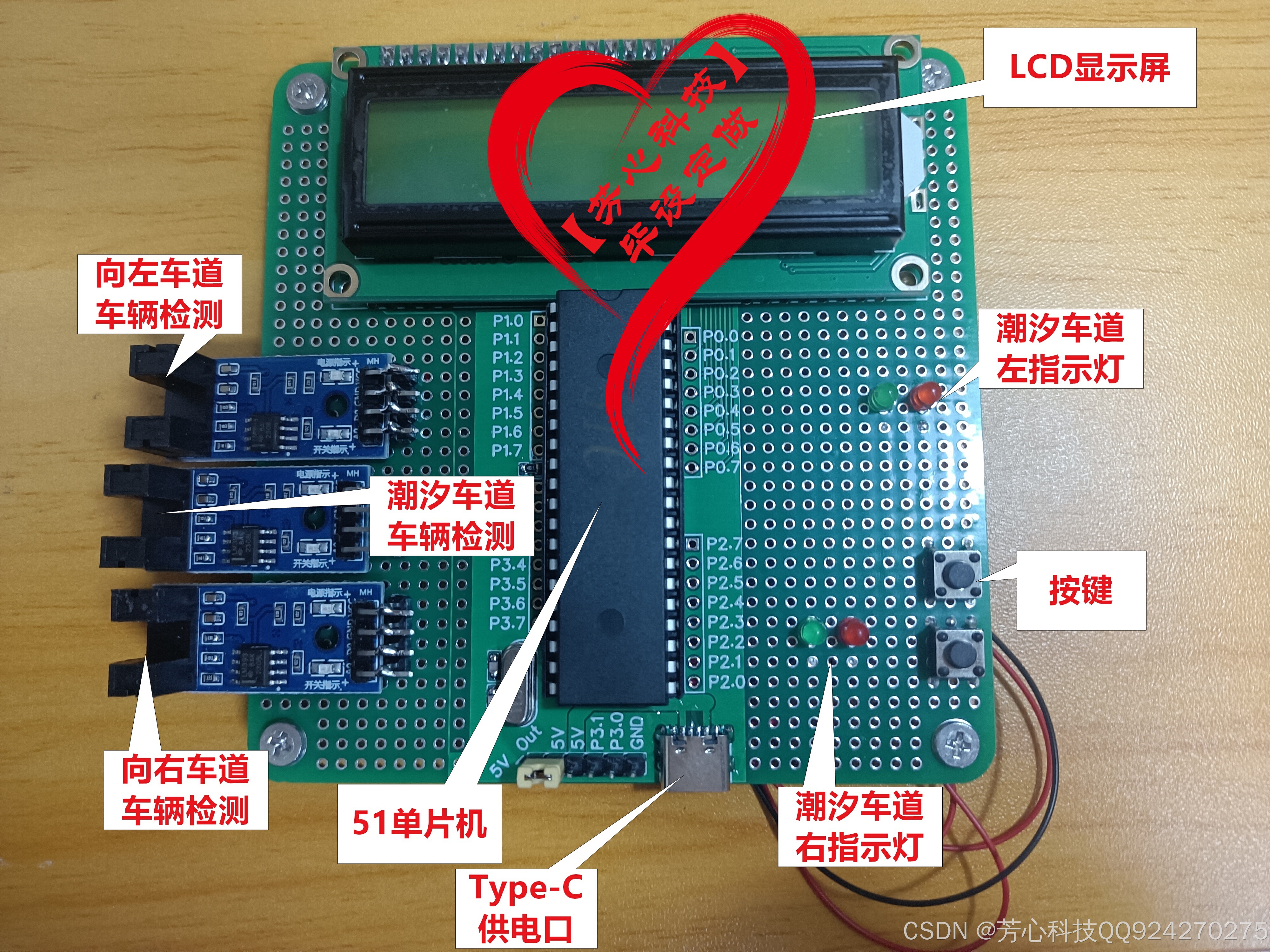
实物效果图:
实现功能:
- 采用STC89C52单片机作为控制核心。
- 通过红外光电传感器检测车流量,一共有三个传感器分别检测向左、向右和潮汐车道的车流量,并通过LCD1602显示屏显示。
- 潮汐车道上左右两个方向各有红绿指示灯,红灯标识禁止通行,绿色表示可以通行。
- 一定时间后,对车流量进行统计,判断潮汐车道走向。
- 通过按键可以手动设计潮汐车道变换的阈值大小。
- 当前走向车流 - 反向车流 >= 潮汐设定阈值,潮汐车道走向开始改变。


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























