







题目描述
下图中,每个方块代表一个像素,每个像素用其行号和列号表示。
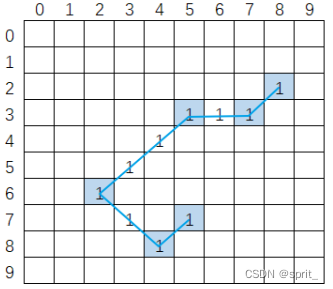
为简化处理,多线段的走向只能是水平、竖直、斜向45度。
上图中的多线段可以用下面的坐标串表示:(2,8),(3,7),(3,6),(3,5),(4,4),(5,3),(6,2),(7,3),(8,4),(7,5)。
但可以发现,这种表示不是最简的,其实只需要存储6个蓝色的关键点即可,它们是线段的起点、拐点、终点,而剩下4个点是冗余的。
现在,请根据输入的包含有冗余数据的多线段坐标列表,输出其最简化的结果。
输入描述
2 8 3 7 3 6 3 5 4 4 5 3 6 2 7 3 8 4 7 5
所有数字以空格分隔,每两个数字一组,第一个数字是行号,第二个数字是列号;
行号和列号范围 为 [0, 64),用例输入保证不会越界,考生不必检查;
输入数据至少包含两个坐标点
输出描述
2 8 3 7 3 5 6 2 8 4 7 5
压缩后的最简化坐标列表,和输入数据的格式相同。
备注
输出的坐标相对顺序不能变化
用例
输入 2 8 3 7 3 6 3 5 4 4 5 3 6 2 7 3 8 4 7 5
输出 2 8 3 7 3 5 6 2 8 4 7 5
说明
如上图所示,6个蓝色像素的坐标依次是:
(2, 8)、(3, 7)、(3, 5)、(6, 2)、(8, 4)、(7, 5)
将他们按顺序输出即可。
题目解析
本题其实就是要我们保留拐点。
那么怎么判断一个点是不是拐点呢?
拐点拐点,自然是运动方向发生改变的点。
那么如何判断一个点的运动方向呢?
运动,指的是从点A到点B,而运动的方向,自然是点A到点B的方向。那么如何描述点A到点B的方向呢?
假设点A(2, 8),点B(3 7),那么此时点A到点B的偏移量为:
offsetX = 3 - 2 = 1
offsetY = 7 - 8 = -1
则(offsetX, offsetY)就是A→B的向量坐标。
当然还有可能出现这样的情况,比如A坐标(3,5),B坐标(6,2),此时A→B向量坐标为(3, -3)
此时(3,-3)向量的方向其实和(1,-1)是相同的。
因此,我们需要对这种向量做简化,方便后续相同方向的比较,即将(3,-3)简化为(1,-1),字面上看,其实就是横坐标、纵坐标都除以3,那么base=3该如何求解呢?求解公式如下
base = max(abs(offsetX), abs(offsetY))
这个公式的好处是,兼容(-5, 0),(0, 10)这种向量。
当我们知道了A→B的方向,那么只要判断下一步B→C的方向是否发生改变,如果发生改变,那么就可以确定B是拐点,比如
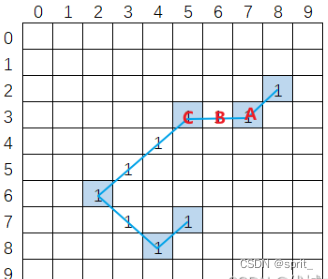
A→B的向量为(-1, 0)
B→C的向量为(-1, 0)
因此B不是拐点
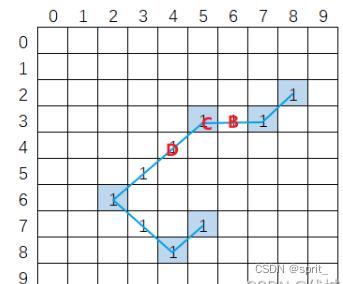
B→C的向量为(-1, 0)
C→D的向量为(1, -1)
因此C是拐点
#include <stdio.h>
#include <stdlib.h>
#define MAX 100000
int main()
{
int size=0;
int num[MAX];
while(scanf("%d",&num[size++])){
if(getchar()!=' ')break;
}
int preX=num[0];
int preY=num[1];
int postdirX=0;
int postdirY=0;
for(int i=2;i<size;i+=2){
int curX=num[i];
int curY=num[i+1];
int offsetX=curX-preX;
int offsetY=curY-preY;
int base=(int)fmax(abs(offsetX),abs(offsetY));
int dirctX=offsetX/base;
int dirctY=offsetY/base;
if(dirctX!=postdirX||dirctY!=postdirY)
printf("%d %d ",preX,preY);
preX=curX;
preY=curY;
postdirX=dirctX;
postdirY=dirctY;
}
printf("%d %d",preX,preY);
return 0;
}

















 7677
7677

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











