







进程同步
一:概念
异步环境下一组并发进程因为直接制约而互相发送消息,互相合作,互相等待是的,使得各进程按一定的速度执行的过程。
同步机制主要任务:执行次序上对多个协作进程进行协调,使并发执行的诸多协作进程之间能按照一定的规则(时序)共享系统资源,并良好相互协作,是的程序的执行有可再现性。
两种形式的制约关系
1.间接相互制约关系(互斥关系)
多线程环境下,并发执行的进程之间会形成相互制约关系。
2.直接相互制约关系(同步关系)
应用程序为了完成某项任务,会建立多个进程,这些进程为了完成统一任务而相互合作
临界资源&&临界区
1.进程在使用某些资源时需要采用互斥方式,这些资源称为临界资源(既可以是硬件资源又可以是软件资源)。
2.临界资源是多个进程必须互斥地对它们进行访问,我们把每个进程中访问临界资源的那段代码称为临界区。
临界区上面的检查代码称为进入区。
临界区下面的代码称为退出区。
访问临界资源需要遵循的原则
1.空闲让进
临界区空闲时,允许一个请求进入临界区的进程立即进入临界区
2.忙则等待
当已有进程进入临界区,其他试图进入临界区的进程必须等待
3.有限等待
对请求访问的进程,应保证能在有限时间内进入临界区(保证不会饥饿)
4.让权等待
进程不能进入临界区,应当立即释放处理机,防止进程忙等待
进程互斥的软件实现方法
1.单标志法
思想:一个进程访问完临界区后会把使用临界区的权限交给另一个进程,即每个进程是否能进入临界区的权限只能被另一个进程赋予。
代码实现如下:
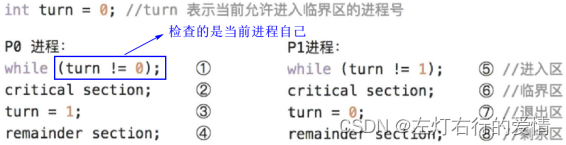
当P0访问临界区,turn为0,此时P1一直在⑤循环,无法进入临界区;
当P0访问完,修改turn为1,P1此时会跳出循环,进入临界区。
注意:
1.该算法可以实现同一时刻最多只允许一个进程访问临界区
2.如果此时允许P0进入临界区,但是P0一直不访问,那么这时会导致,虽然临界区空闲,但是也不允许P1访问。
所以我们可以看到,单标志法存在的问题是:违背了空闲让进原则。
2.双标志先检查法
思想:设置一个布尔数组flag[],表示数组中各元素各进程是否想进入临界区,true–想进,false–不想进;
每个进程在进入临界区前先检查当前有没有别的进程想进入临界区,如果没有,把自身对应的标志flag[i]改为true,之后访问临界区。
代码实现:
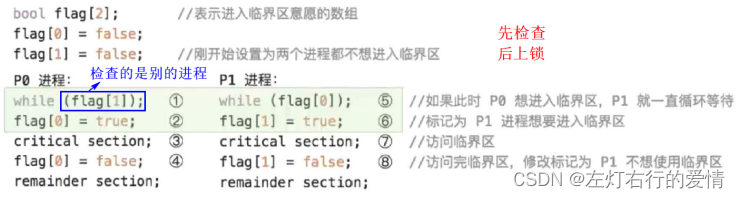
存在的问题:
P0进程进入之后,在修改P0位ture之前,
如果此时切换到P1,P1检查没有别的进程想进入临界区,P1也会改为true,导致两个进程都为ture,同时访问,违背了忙则等待原则。
注意:出现这种情况的原因是检查和上锁不是一体的。
3.双标志后检查法
思想:双标志先检查版的改版,先上锁后检查,谁想进谁直接将自身改为true,不关系其他进程,改为true后,再检查有没有其他进程想访问。
代码实现:
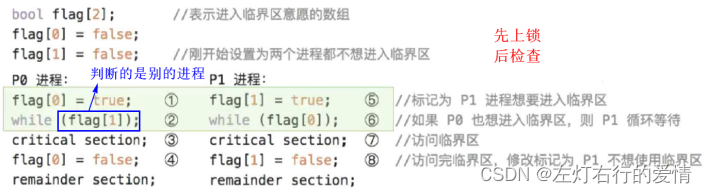
存在的问题:
P0想进入,把P0改为了true;
此时恰好切换到了P1,P1想进入,也改为了true;
导致两个进程都为true,谁也无法访问临界区,产饥饿现象。
注意:
1.双标志后检查法解决了忙则等待的问题,但是又违背了空闲让进和有限等待原则。
2.出现的原因是:进入区的检查和上锁不是一体的
4.Peterson算法
思想:双标志后检查法的改版,若两个进程都想进入临界区,可以主动让对方优先访问临界区。
代码实现:
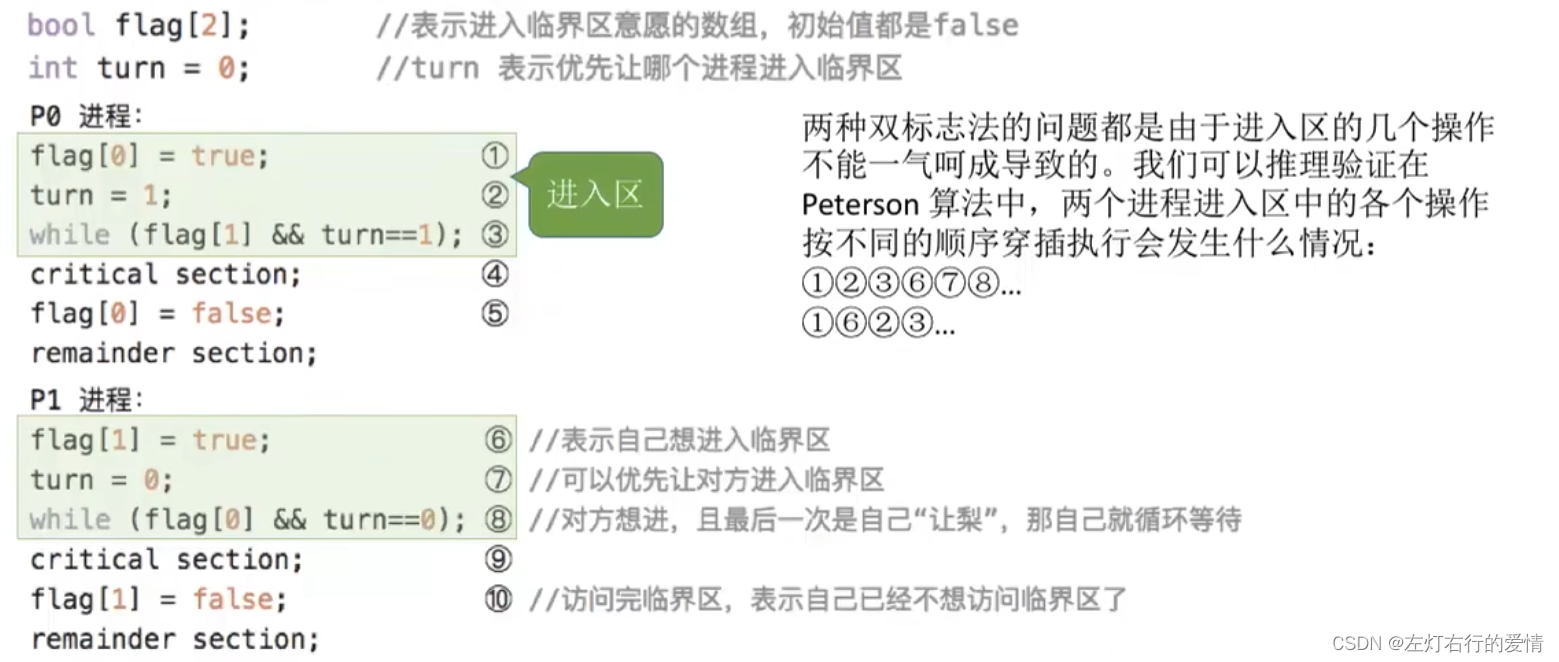
流程步骤举例:
1.P0想进入,P0改为true;
2.P1想进入,P1改为true;
3.切换到P0,检查前,让给对方(将trun改为1),检查发现,P1true且trun1,P0死等到时间片到
4.切换到P1,检查前,让给对方(trun改为0),检查发现,P0true且trun0,P1死等到时间片到
5.切换到P0,检查发现,turn!=1,向下执行,访问临界区。
所以我们发现,Peterson算法解决了空闲让进,忙则等待,有限等待三个原则,但违背了让劝等待原则(发生忙等)。
我们可以发现,利用软件进行进程同步似乎都或多或少有点问题,而且也有点难度,那么有没有更好一点的解决方式呢?
答案很显然是有的,接下来我们了解硬件同步机制。
硬件同步机制
1.中断屏蔽方法
利用开/关中断指令实现,与原语思想相同,即某进程开始访问临界区到结束访问为止都不允许被中断,也就不能发生进程切换,因此也不可能出现两个进程同时访问临界区的情况。
缺点:
1.不适用多处理机;只适用于内核进程,不适用于用户进程。
2.滥用可能会导致严重后果
2.TestAndSet指令(TS指令)
又称TestAndSetLock指令(TSL指令)
TSL指令是用硬件实现,执行过程中不允许被中断
实现代码如下:
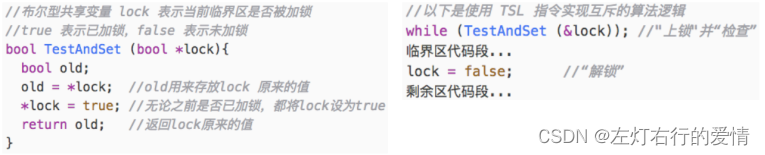
如果lock是false(没有进程访问临界区),TSL返回值是false,不会死等,此进程可以访问临界区;
如果lock为true(有进程访问临界区),TSL返回值为true,发生死等,直至访问临界区的进程访问结束,将lock修改为false,此进程才可以进入临界区。
缺点:不满足让权等待原则,暂时无法进入临界区的进程会占用CPU并循环执行TSL指令,从而导致忙等。
3.Swap 指令
也成Exchange指令(XCHG指令)
Swap指令是用硬件实现的,执行的过程不允许被中断
代码实现:
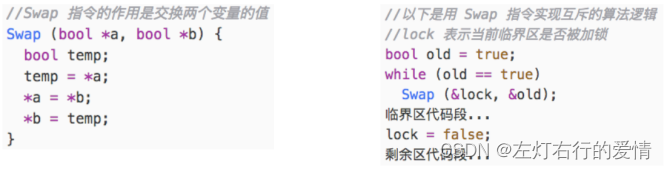
当lock为false(无进程访问临界区时),才可以跳出循环,访问临界区
缺点:不满足让权等待原则。
信号量机制
一:为什么要学信号量机制?
我们上面了解到了进程互斥的四种软件实现方法,三种硬件实现方法都无法实现让劝等待,也就是进程无法进入临界区时,会占用处理机一直循环(我们理想情况是直接切换进程,而不是一直循环),
信号量机制就可以为我们解决这个问题。
二:什么是信号量机制
原理:为实现进程的互斥与同步,多个进程通过相互传递信号进行合作,迫使某个进程收到信号自动暂停执行(阻塞等待),直到它收到唤醒信号。
三:信号量
1.整形信号量
最初整形信号量定义为一个用于表示资源数目的整形量S,但是与一般整形量不同,除了初始化,还可以通过两个标准的原子操作来访问—wait(S),singal(S)。
实现如下:
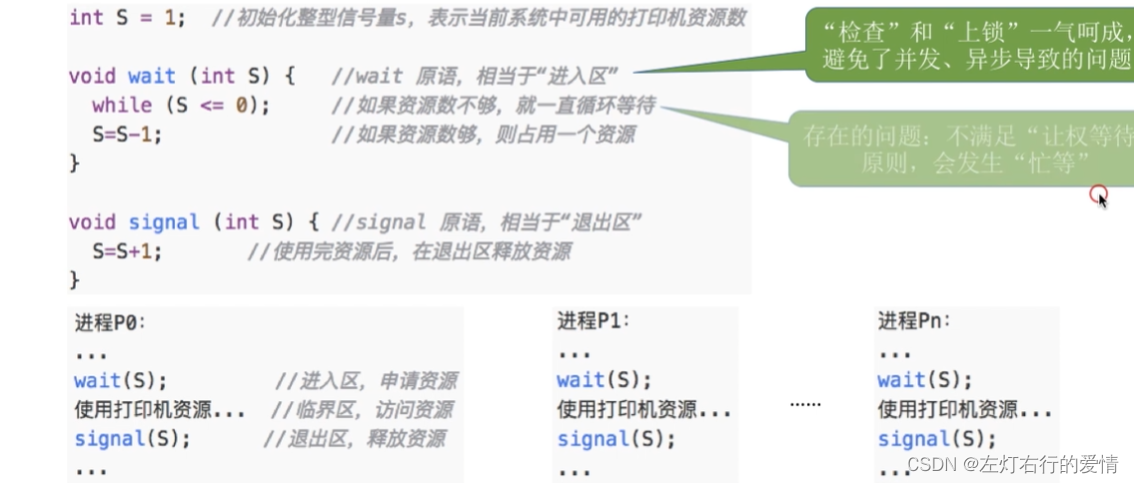
我们可以看出,这里面还存在着让权等待。
2.记录型信号量
在整形信号量(不满足让权等待)的基础上进行改进,使用记录型数据结构表示信号量:
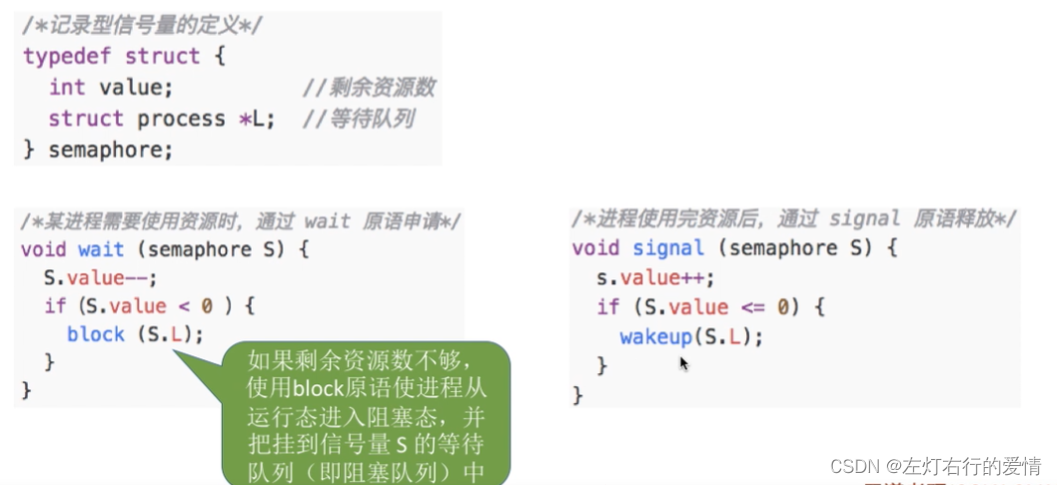
我们一般称原语的简写为:
Wait(S)—P操作P(S)
Signal(S)—V操作V(S)
如果你学过并发编程中的AQS,或者Semaphore,相信会更好理解这个概念。
信号量实现进程互斥,同步,前驱关系
一:信号量机制实现进程互斥
设互斥信号量为mutex,初值为1,实现如下:
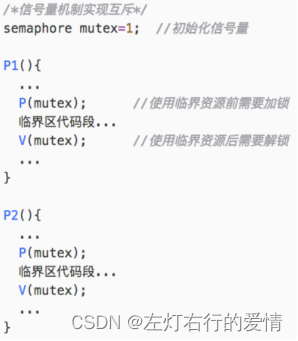
注意:P,V操作必须要成对出现,缺P无法保证互斥访问,缺V无法唤醒等待线程与解锁
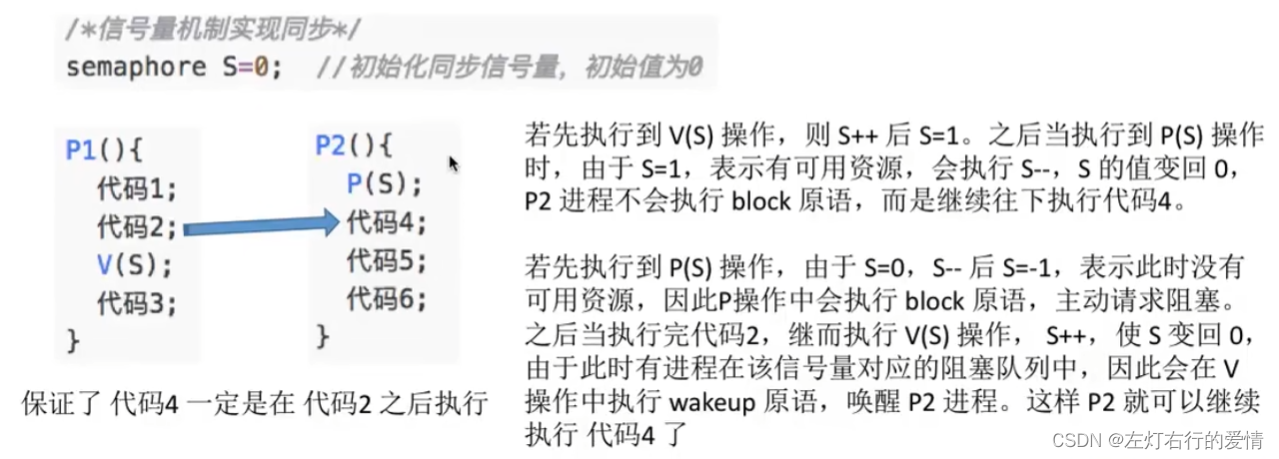
2.信号量机制实现进程同步
实现进程同步,必须保证进程执行是有先后次序,即一前一后。
1:设置同步信号量S,初值为0(开始没有资源,P1进程想使用必须通过P2产生资源)
2:在“前操作”之后执行V(S)
3:在“后操作”之后执行P(S)
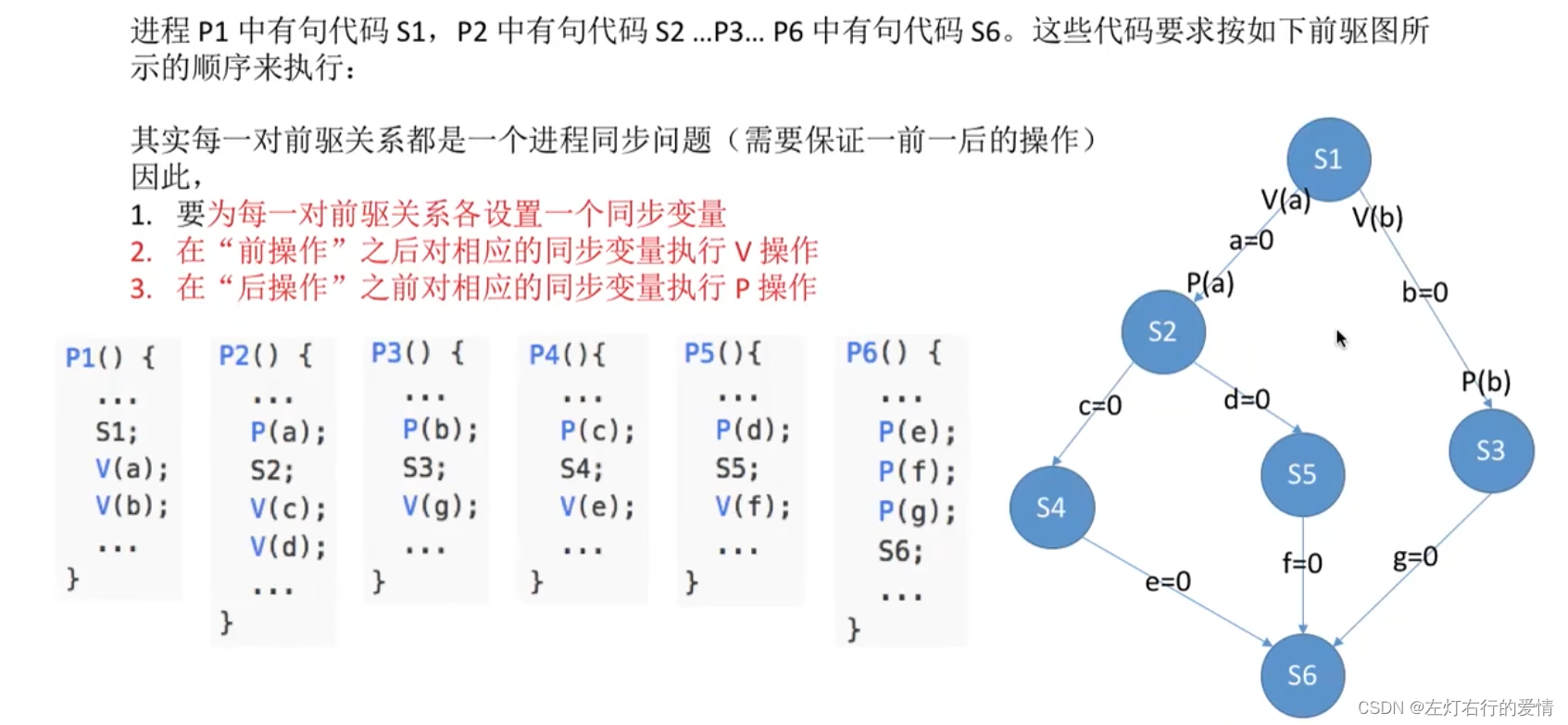
3.信号量机制实现前驱关系
总结
生产者消费者等问题,后面会更,先把知识点更了,后面读者什么的也会更。















 1489
1489











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









