






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
研究背景与意义
随着无人机在众多领域(如军事侦察、民用航拍、物流配送等)的广泛应用,其飞行安全性和可靠性愈发关键。无人机系统复杂,由飞行控制系统、动力系统、传感器系统等多个子系统构成,在运行过程中可能遭遇各种故障,如传感器故障(如气压计、陀螺仪、加速度计故障)、执行器故障(如电机故障、舵机故障)、通信故障以及软件故障等。故障检测与诊断技术能够及时发现故障并确定故障类型与位置,有助于采取相应措施保障无人机安全飞行、降低维护成本并提高任务成功率。
常见故障检测与诊断方法
基于模型的方法:解析冗余法:利用无人机的数学模型,通过不同传感器测量值或系统变量之间的冗余关系构建残差信号。例如,根据动力学方程和运动学方程,对比由不同传感器得到的速度、位置等信息计算出的理论值与实际测量值的差异,若残差超出设定阈值,则表明可能存在故障。状态估计法:采用卡尔曼滤波、扩展卡尔曼滤波或粒子滤波等滤波技术对无人机的状态进行估计。正常情况下,估计值与测量值应较为接近,通过监测两者之间的偏差来检测故障。比如,利用卡尔曼滤波估计无人机的位置和速度状态,当传感器发生故障导致测量值与滤波估计值偏差过大时,可判定传感器故障。基于数据驱动的方法:机器学习法:通过大量的无人机正常运行数据和故障数据训练机器学习模型,如神经网络、支持向量机等。训练好的模型能够根据输入的实时运行数据特征判断无人机是否发生故障以及故障类型。例如,收集无人机在不同飞行姿态、环境条件下的传感器数据作为训练样本,训练神经网络来识别电机故障、传感器偏差故障等各类故障模式。统计分析法:对无人机的运行数据进行统计分析,如计算均值、方差、协方差等统计特征,建立统计模型或控制图。当数据的统计特征偏离正常范围时,提示可能存在故障。比如,监测无人机飞行过程中传感器数据的方差变化,若方差突然增大,可能意味着传感器数据出现异常波动,存在故障风险。
故障诊断流程与关键技术
故障检测:通过上述方法实时监测无人机系统的运行状态,生成残差或特征指标,并与预设的阈值进行比较。当超过阈值时,触发故障报警,表明可能存在故障情况,但此时还不能确定具体故障类型与位置。故障隔离与定位:在检测到故障后,进一步利用故障特征信息、系统结构知识以及故障传播模型等,采用诸如故障树分析、多模型切换、基于规则的推理等技术,将故障定位到具体的子系统、部件或传感器等。例如,通过故障树分析,从无人机整体故障现象逐步向下排查到具体的故障分支,确定是飞行控制系统中的某个舵机故障还是动力系统中的某个电机故障。故障评估与决策:确定故障类型和位置后,评估故障对无人机飞行性能和安全性的影响程度,根据评估结果制定相应的应对策略,如调整飞行控制策略、切换冗余部件、执行返航或迫降操作等
研究挑战与发展趋势
挑战: 无人机系统的复杂性和非线性使得精确的数学模型建立困难,影响基于模型方法的准确性。实际飞行环境的多变性和不确定性(如气流、电磁干扰等)增加了故障检测与诊断的难度,容易产生误报和漏报。故障数据的获取有限,尤其是一些罕见故障的数据,导致基于数据驱动方法的训练样本不充分,模型泛化能力受限。发展趋势: 多传感器融合技术的应用,综合利用多种类型传感器的信息,提高故障检测与诊断的可靠性和准确性。深度学习等先进机器学习技术的深入研究与应用,能够自动学习复杂的故障特征和模式,更好地处理非线性和不确定性问题。开发自适应故障检测与诊断算法,能够根据无人机的运行状态和环境变化动态调整诊断策略和参数,提高系统的鲁棒性。与无人机的自主决策和控制系统相结合,实现故障情况下的智能自主应对,提高无人机的自主性和安全性。
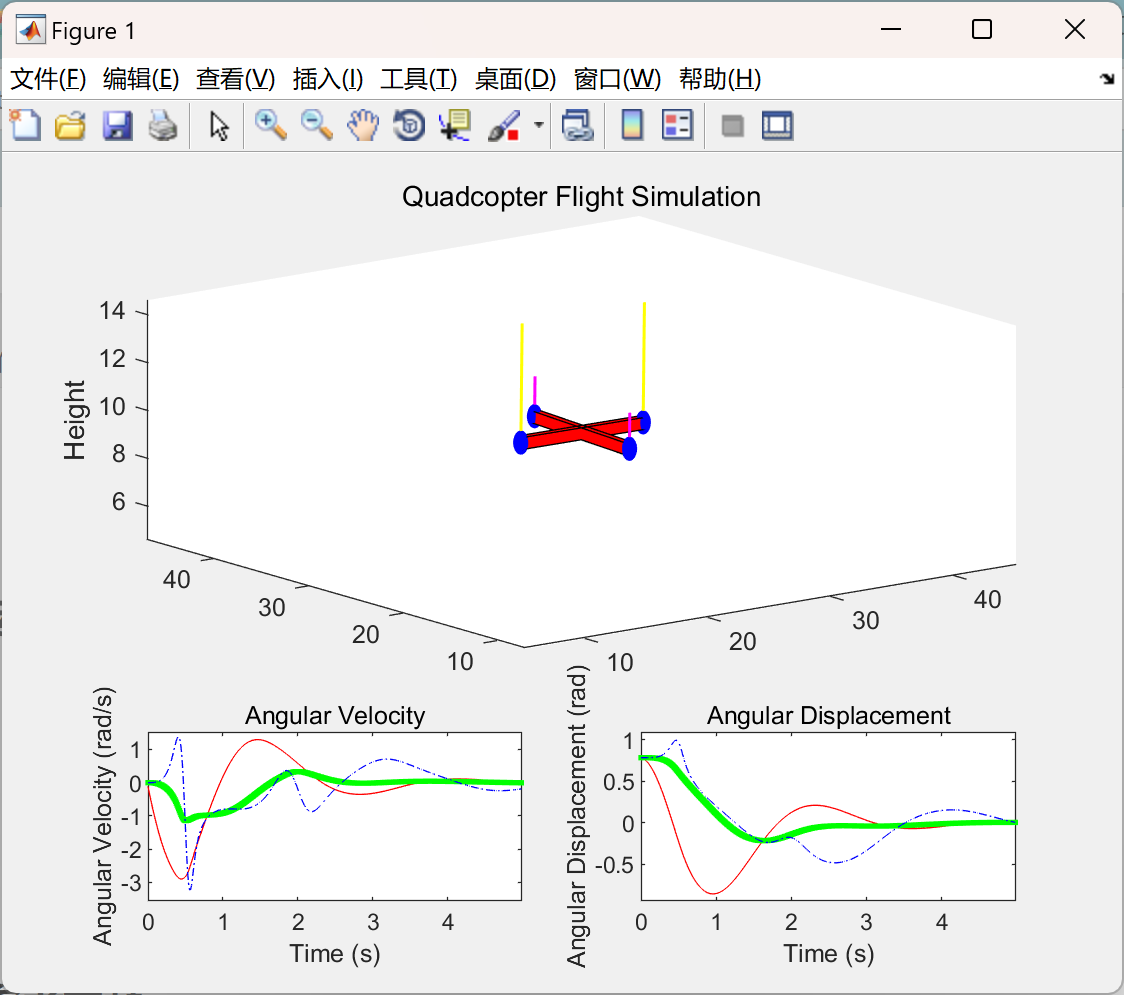
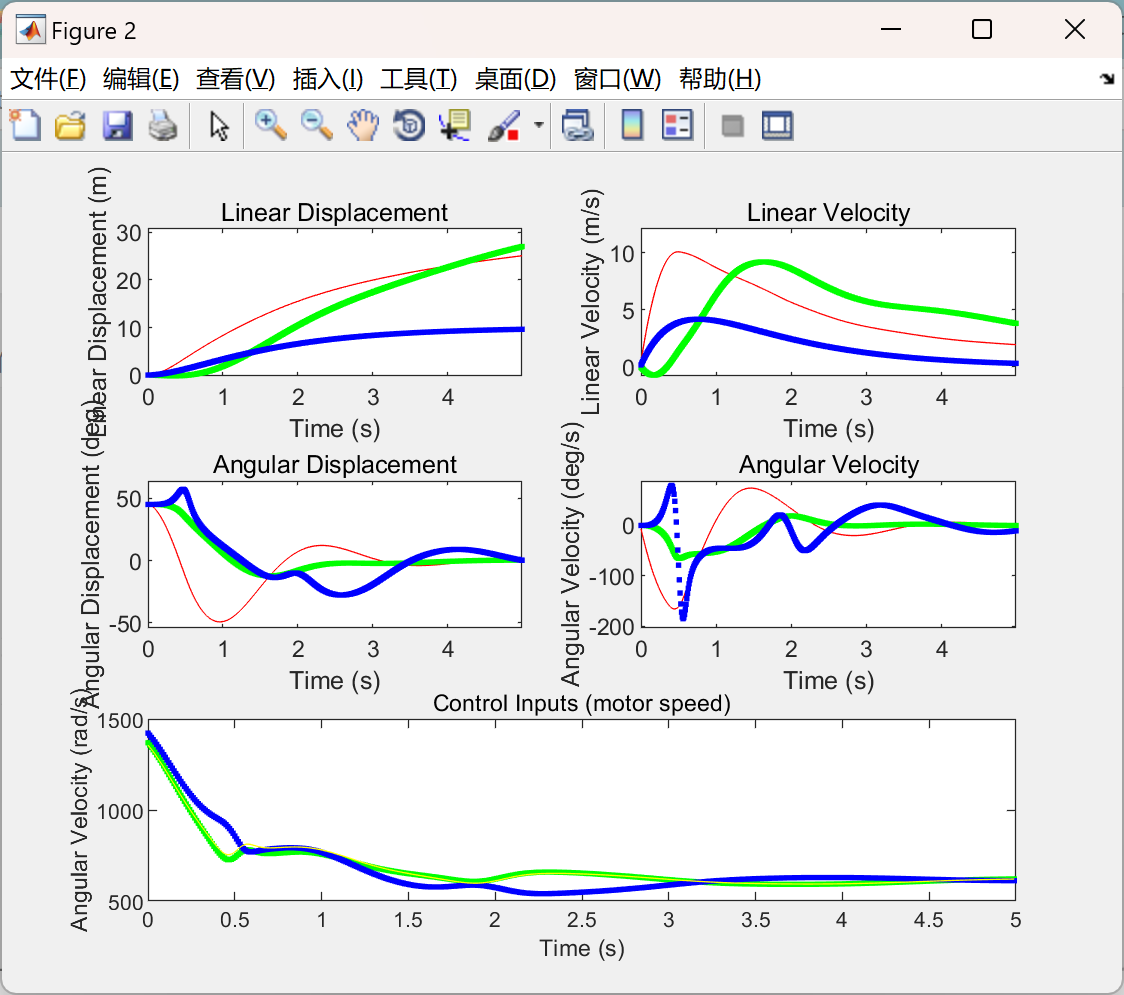
📚2 运行结果
主函数部分代码:
addpath '../src'
% initialize the controllers
thrust_c_params = [1.5; 2.5];
kp = 6; kd = 1.75;
phy_c_params = [kp; kd];
theta_c_params = [kp; kd];
psy_c_params = [kp; kd];
controllers = construct_controllers(thrust_c_params, phy_c_params, theta_c_params, psy_c_params);
% setup initial states
x = [0; 0; 0];
xdot = [0; 0; 0];
theta = deg2rad([45; 45; 45]);
thetadot = deg2rad([0; 0; 0]);
init_state = struct('x', x, 'xdot', xdot, 'theta', theta, 'thetadot', thetadot);
% setup final states
desired_z = 10;
desired_zdot = 0; % must be a function of time
desired_theta = deg2rad([0; 0; 0]);
desired_thetadot = deg2rad([0; 0; 0]); % must be a function of time
desired_state = struct('z', desired_z, 'zdot', desired_zdot, 'theta', desired_theta, 'thetadot', desired_thetadot);
% Run simulation
act = simulate(controllers, desired_state, init_state, 0, 5, 0.01);
visualize(act);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]吴文浩,赵金星,李晨,等.基于INDI的四旋翼无人机容错控制研究与性能分析[J/OL].智能计算机与应用,1-7[2024-12-23].https://doi.org/10.20169/j.issn.2095-2163.23122601.
[2]张博涵,朱许,黄江涛,等.风干扰及输入约束下的无人机一致性编队控制[J].海军航空大学学报,2024,39(06):745-754.
🌈4 Matlab代码实现



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









