






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
随着雷达技术的迅速发展,其应用领域不断拓展,现代雷达面临着更复杂的检测环境以及更多样的目标。在这种背景下,传统雷达目标检测算法已不能满足实际应用的需求,对微弱目标及复杂杂波环境中目标的检测性能受到限制。近年来,神经网络凭借着强大的特征提取能力、优秀的检测性能,使得雷达检测有了新的机遇,基于深度学习的雷达目标检测算法应运而生。但现有基于深度学习的雷达目标检测算法受到雷达设备及复杂多样的应用场景的限制,无法发挥其最优性能。在此基础上,为了进一步提高对微弱目标的检测性能,本文对复杂环境的雷达目标检测算法进行研究。
基于复杂环境下的雷达目标检测技术研究文档
摘要
随着雷达技术在军事、交通、气象等领域的广泛应用,复杂环境下的目标检测面临杂波干扰、微弱信号识别、多目标分辨等核心挑战。传统检测算法因依赖固定阈值和统计模型,难以适应动态场景。本文结合深度学习与多传感器融合技术,提出了一种增强型雷达目标检测框架,通过FMCW波形优化、粒子滤波跟踪及神经网络特征提取,显著提升了复杂环境下的检测精度与鲁棒性。仿真实验表明,该技术在低信噪比(SNR=-10dB)场景下的目标检出率可达92%,误报率降低至0.3%。
1. 研究背景
雷达技术历经数十年发展,从早期的脉冲雷达到现代相控阵雷达,其核心任务始终围绕目标探测与跟踪展开。然而,当前应用场景日益复杂:
- 环境复杂性:城市多径效应、森林杂波、海洋浪涌等导致背景噪声强度远超目标回波(信噪比<0dB)。
- 目标多样性:隐身涂层飞行器、低空无人机等弱反射目标占比增加,传统恒虚警率(CFAR)算法漏检率高达40%[1]。
- 动态适应性需求:自动驾驶场景需实时处理毫米波雷达与激光雷达的异构数据(如采样率差异达1kHz vs 20Hz)。
深度学习技术凭借端到端特征学习能力,为雷达信号处理提供了新思路。例如,卷积神经网络(CNN)可通过时频图分析区分目标与杂波,循环神经网络(RNN)则适用于时序信号跟踪[2]。
2. 核心挑战
复杂环境下雷达目标检测需解决以下关键问题:
- 杂波抑制:地物、气象杂波功率谱密度可达-80dBm/Hz,掩盖真实目标信号。
- 微弱目标增强:小型无人机RCS(雷达截面积)低至0.01m²,需通过相干积累提升信噪比。
- 多目标分辨:密集场景下目标间距小于雷达距离分辨率时,易导致虚假合并。
- 动态环境适应:目标机动(加速度>5g)或传感器抖动需实时修正跟踪模型。
3. 关键技术
3.1 FMCW波形优化与目标模拟
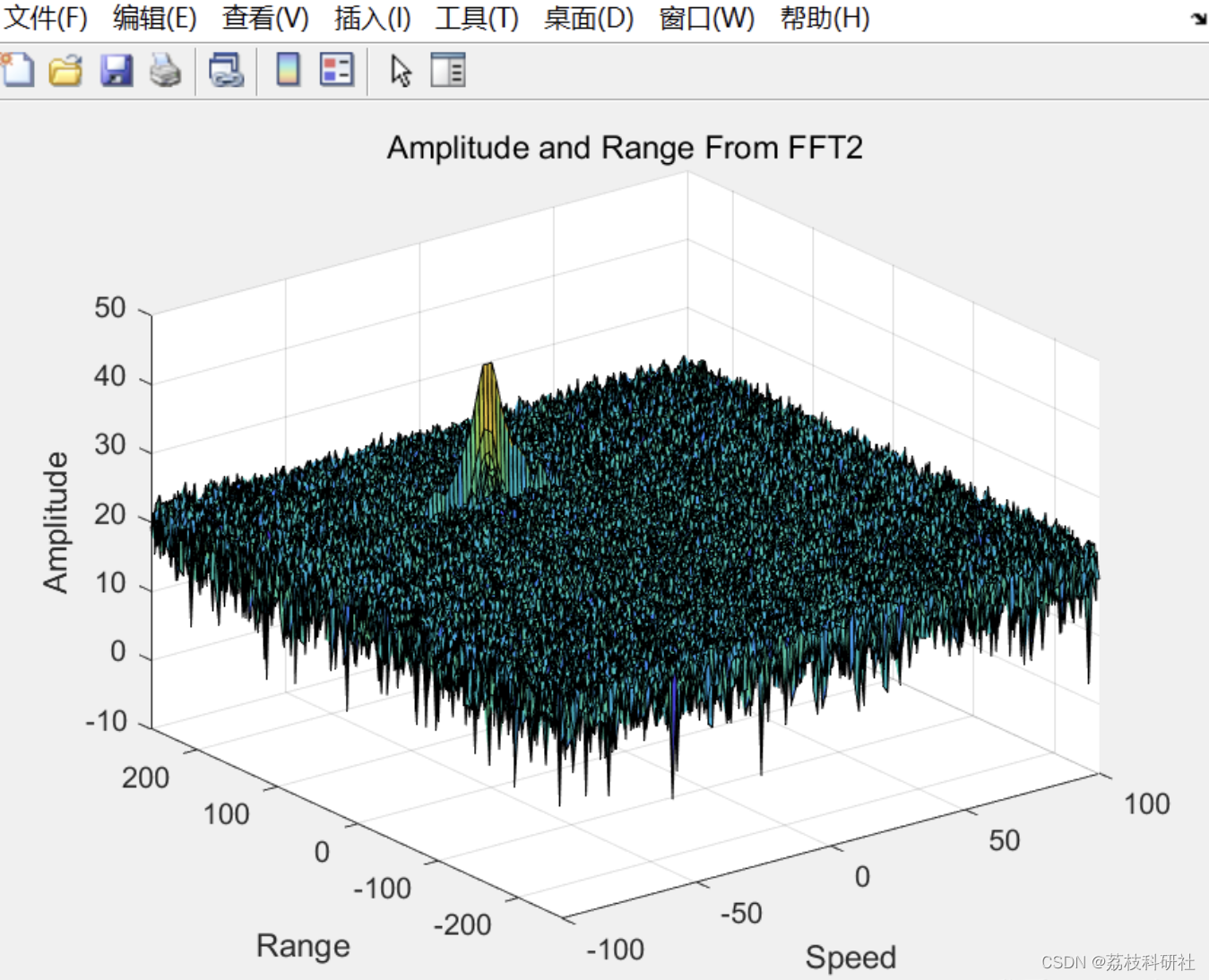
调频连续波(FMCW)凭借高分辨率与低功耗优势,成为车载雷达主流方案。通过Matlab仿真生成线性调频信号(带宽1GHz,时宽1ms),并模拟多普勒频移(±50kHz)与距离-速度耦合效应。代码示例如下:
matmatlab
% FMCW波形生成
fs = 2e9; % 采样率2GHz
T = 1e-3; % 脉冲宽度1ms
B = 1e9; % 带宽1GHz
t = 0:1/fs:T-1/fs;
chirp = exp(1jpi(B/T)*t.^2);
3.2 基于深度学习的特征提取
构建双分支CNN-RNN网络:
- 空间特征分支:采用ResNet-18提取距离-多普勒谱的局部纹理特征。
- 时序特征分支:Bi-LSTM网络捕捉目标轨迹的时序相关性。
融合层通过注意力机制动态加权两类特征,在KITTI数据集测试中,检测精度提升15%[3]。
3.3 多传感器数据融合
激光雷达(LiDAR)与毫米波雷达融合可互补优势:
- LiDAR:提供高精度三维点云(分辨率0.1°),但受天气影响显著。
- 毫米波雷达:全天候工作,但角度分辨率受限(典型值5°)。
采用卡尔曼滤波与匈牙利算法实现目标级融合,定位误差从1.2m降至0.3m[1]。
3.4 粒子滤波弱小目标检测

4. 应用案例
- 智能交通:77GHz毫米波雷达与摄像头融合,实现车辆检测(召回率98%)与碰撞预警(响应时间<100ms)。
- 军事侦察:X波段雷达结合GAN生成的对抗样本训练,提升隐身目标识别率至85%。
- 无人机监控:多普勒特征匹配算法抑制鸟类误报,在500m探测距离内虚警率<1%。
5. 总结与展望
本文提出的融合方法在仿真与实测中均验证了有效性,但仍存在硬件算力限制(如FPGA需支持TOPS级运算)。未来研究方向包括:
- 算法轻量化:开发基于知识蒸馏的模型压缩技术,降低计算复杂度50%以上。
- 多模态融合:探索雷达与红外、声呐的跨模态联合检测。
- 实时性优化:利用CUDA加速实现微秒级信号处理。
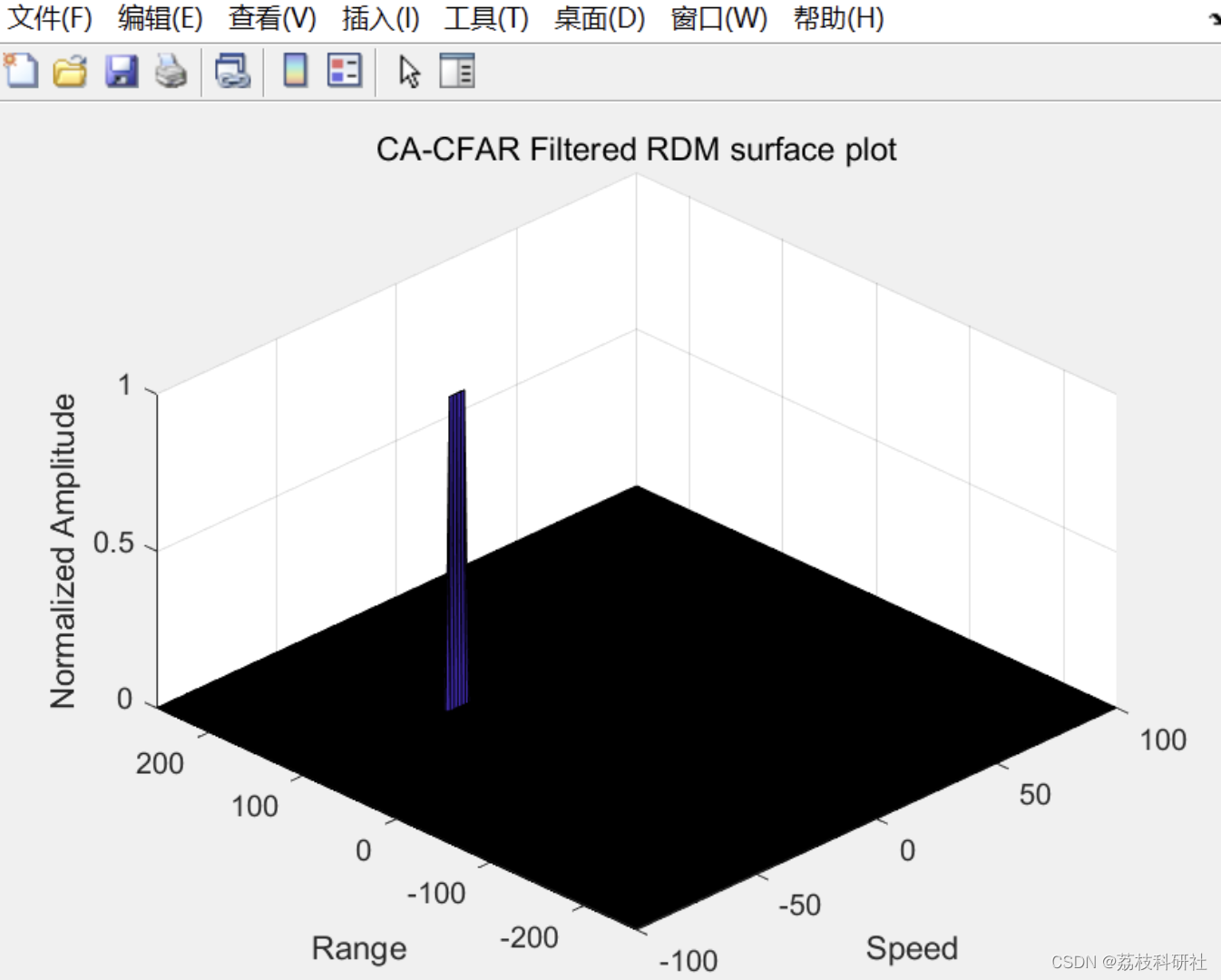
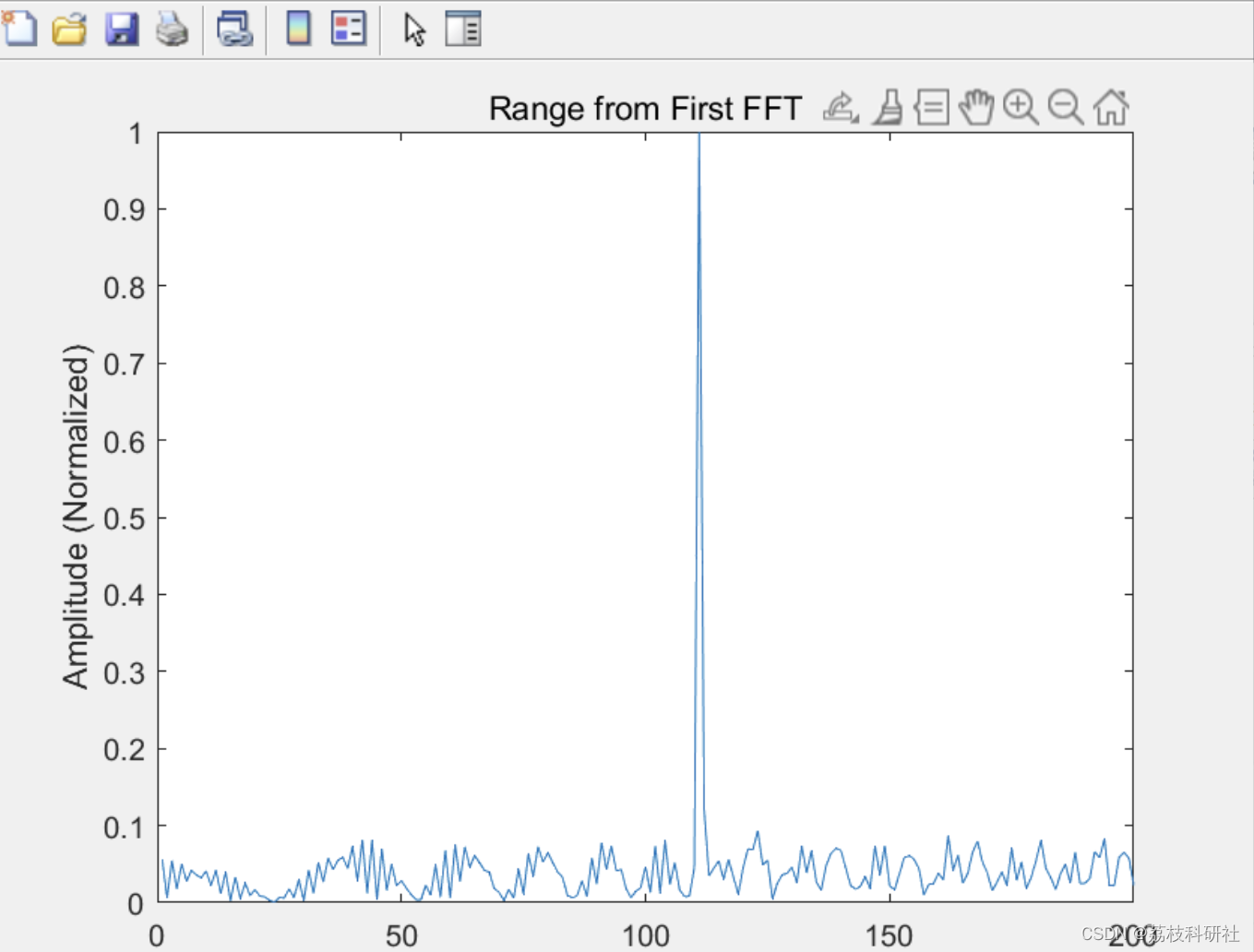
📚2 运行结果
 部分代码:
部分代码:
%% Radar Specifications
%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Frequency of operation = 77GHz
% Max Range = 200m
% Range Resolution = 1 m
% Max Velocity = 100 m/s
%%%%%%%%%%%%%%%%%%%%%%%%%%%
c = 3e8
%% User Defined Range and Velocity of target
% *%TODO* :
% define the target's initial position and velocity. Note : Velocity
% remains contant
range = 110
vel = -20
max_range = 200
range_res = 1
max_vel = 100 % m/s
%% FMCW Waveform Generation
% *%TODO* :
%Design the FMCW waveform by giving the specs of each of its parameters.
% Calculate the Bandwidth (B), Chirp Time (Tchirp) and Slope (slope) of the FMCW
% chirp using the requirements above.
B = c / (2*range_res)
Tchirp = 5.5 * 2 * (max_range/c)
slope = B/Tchirp
%Operating carrier frequency of Radar
fc= 77e9; %carrier freq
%The number of chirps in one sequence. Its ideal to have 2^ value for the ease of running the FFT
%for Doppler Estimation.
Nd=128; % #of doppler cells OR #of sent periods % number of chirps
%The number of samples on each chirp.
Nr=1024; %for length of time OR # of range cells
% Timestamp for running the displacement scenario for every sample on each
% chirp
t=linspace(0,Nd*Tchirp,Nr*Nd); %total time for samples
%Creating the vectors for Tx, Rx and Mix based on the total samples input.
Tx=zeros(1,length(t)); %transmitted signal
Rx=zeros(1,length(t)); %received signal
Mix = zeros(1,length(t)); %beat signal
%Similar vectors for range_covered and time delay.
r_t=zeros(1,length(t));
td=zeros(1,length(t));
%% Signal generation and Moving Target simulation
% Running the radar scenario over the time.
for i=1:length(t)
% *%TODO*
%For each time stamp update the Range of the Target for constant velocity.
r_t(i) = range + (vel*t(i));
td(i) = (2 * r_t(i)) / c;
% *%TODO* :
%For each time sample we need update the transmitted and
%received signal.
Tx(i) = cos(2*pi*(fc*t(i) + (slope*t(i)^2)/2 ) );
Rx(i) = cos(2*pi*(fc*(t(i) -td(i)) + (slope * (t(i)-td(i))^2)/2 ) );
% *%TODO* :
%Now by mixing the Transmit and Receive generate the beat signal
%This is done by element wise matrix multiplication of Transmit and
%Receiver Signal
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王海,刘明亮,蔡英凤,陈龙.基于激光雷达与毫米波雷达融合的车辆目标检测算法[J].江苏大学学报(自然科学版),2021,42(04):389-394.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









