






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
三自由度欠驱动水下机器人仿真研究的技术实现与可视化
一、欠驱动系统的基本特性与控制挑战
-
欠驱动定义与特性
欠驱动系统指控制输入数量少于自由度(DOF)的机械系统。例如,三自由度水下机器人可能仅配备两个推进器,导致其无法直接控制所有运动方向(如俯仰角需通过姿态调整间接实现)。这种特性增加了控制复杂性,需依赖非线性控制算法(如滑模控制、模糊PID或神经网络)实现轨迹跟踪。 -
控制难点
- 非完整性约束:欠驱动系统存在速度与角速度间的耦合关系,需通过动力学建模捕捉附加质量、流体阻尼等非线性效应。
- 全局可控性缺失:仅有部分状态可控,需设计补偿策略(如扩展状态观测器或RBF网络)处理执行器饱和与外部干扰。
- 轨迹规划与同步:需结合路径规划算法(如动态窗口法)与控制策略,确保任务执行的时间一致性。
二、仿真工具与动力学建模方法
-
常用仿真工具
- Gazebo + UUV Simulator:支持水下流体动力学模拟,集成推进器模型、传感器(IMU、DVL)及机械臂插件,适用于多机器人协同仿真。
- MATLAB/Simulink:提供机器人工具箱(Robotics System Toolbox)与Simscape Multibody,便于搭建动力学模型并验证控制算法。
- Unity3D + ROS:通过物理引擎(NVIDIA PhysX)与时间线(Timeline)功能实现高保真动画,支持硬件在环(HIL)仿真与多传感器数据同步。
-
动力学建模步骤
- 坐标系定义:建立惯性坐标系(大地坐标系)与载体坐标系,描述位置、姿态及速度参数。
- 牛顿-欧拉方程:考虑附加质量矩阵 MM、科氏力矩阵 C(ν)C(ν)、流体阻尼矩阵 D(ν)D(ν) 及恢复力 GG,构建6自由度动力学方程:
Mν˙+C(ν)ν+D(ν)ν+G=τMν˙+C(ν)ν+D(ν)ν+G=τ
其中 ττ 为推进器推力与力矩的合力。
- 欠驱动简化:针对三自由度平面运动(横荡、纵荡、偏航),解耦动力学方程并引入约束条件。
- 控制算法集成示例
- 滑模控制:设计滑模面补偿模型不确定性,结合RBF网络估计外部扰动。
- 双闭环模糊PID:外环规划轨迹,内环调节俯仰角,通过模糊逻辑动态调整PID参数以适应水流干扰。
- 强化学习:基于Q-learning或深度确定性策略梯度(DDPG)优化推力分配策略。
三、时间同步动画与数据记录方案
-
动画生成技术
- Unity时间线控制:利用动画层(Animation Layers)与混合树(Blend Trees)实现多自由度运动的平滑过渡,通过脚本同步推进器控制信号与机器人位姿。
- Gazebo可视化插件:通过ROS话题发布机器人状态(/odom、/tf),使用RViz或UWSim实时渲染运动轨迹。
- MATLAB App Designer:自定义GUI界面,结合Simulink 3D Animation模块导出同步数据与动画。
-
数据同步记录方法
- 时间戳对齐:在仿真循环中记录时间戳、状态变量(位置、速度、姿态角)及控制输入(推进器转速、舵角),保存为CSV或ROS Bag文件。
- 硬件在环同步:采用PTP/gPTP协议确保仿真时钟与物理设备(如MCU、传感器)的微秒级同步。
- 日志与故障排查:建立异常检测机制(如状态阈值报警),配合NWDAF(网络数据分析功能)监控时间同步状态。
四、现有研究中的可视化案例
-
Simulink反步法控制器案例
- 项目基于三自由度模型,实现轨迹跟踪与航向控制,输出包含位姿曲线、推力分配及能量消耗的可视化报告。
- 通过S函数(S-Function)集成流体动力学模型,验证不同流速下的控制鲁棒性。
-
UUV Simulator多机器人仿真
- 支持RexROV等模型的双机器人协同作业,实时显示机械臂操作与水动力相互作用(如涡流效应)。
- 结合OpenFOAM进行CFD分析,验证推进器布局对定深运动稳定性的影响。
-
Unity3D半实物仿真平台
- 搭建虚拟水下场景(如珊瑚礁、管道网络),通过HMD(头戴显示器)实现操作员视角的沉浸式交互。
- 集成SLAM算法,生成三维点云地图并叠加机器人实时轨迹。
五、技术挑战与未来方向
- 高保真流体仿真:需结合CFD(如Fluent动网格)与实时物理引擎,平衡计算精度与速度。
- 异构系统集成:实现ROS 2、OPC UA与5G TSCTSF(时间同步服务)的无缝对接,支持分布式控制。
- 数字孪生应用:通过数字孪生模型预测故障并优化任务策略,提升深海作业可靠性。
六、结论
三自由度欠驱动水下机器人的仿真需综合动力学建模、先进控制算法及可视化工具,通过时间同步技术确保动画与数据的精确对应。现有研究已提供多种实现路径(如Simulink、Gazebo、Unity3D),未来可进一步探索AI驱动的高效控制与跨平台集成方案。
📚2 运行结果
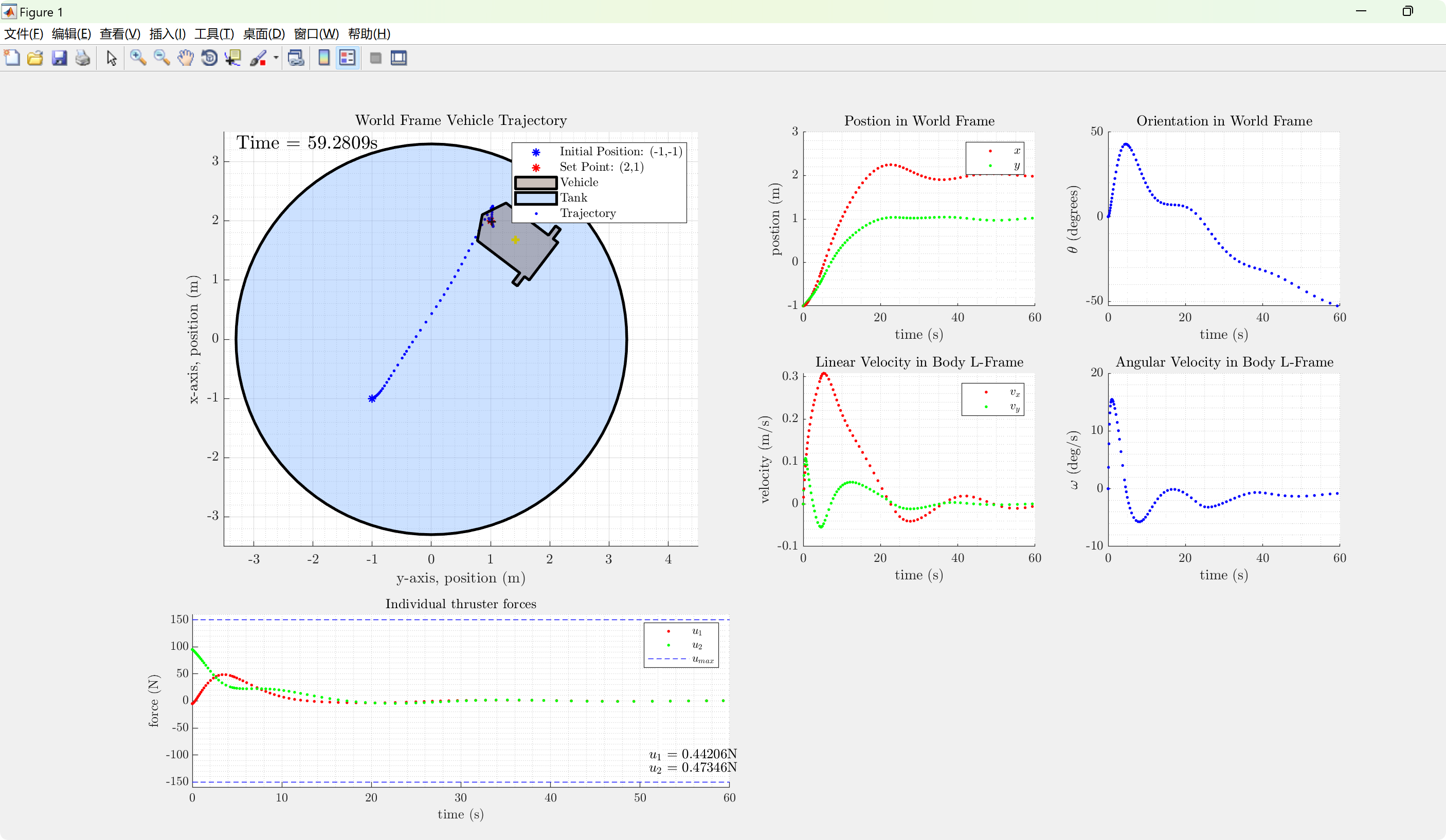
部分代码:
%% Configure Simulation
% Vehicle Parameters
S = get_3DOF_modelparams();
S.max_thrust = 150;
S.getNet = 0; %1 to get net forces, 0 to get individual truster forces
vehicle_scale = 1; % for drawing graphic only
% Initial Conditions
p0 = [-1;-1;0]; % initial postion (world frame)
v0 = [0;0;0]; % initial velocity (body l-frame)
x0 = [p0;v0]; % initial state
tspan = [0 60]; % simulation time span
% Desired Set Point
S.xd = [2;1;0;0]; %underactuated
% S.xd = [2;1;pi/2;0;0;0]; %fully actuated
% Configure Latex Interpreter - needs to be run once
set(groot,'defaulttextinterpreter','latex');
set(groot, 'defaultAxesTickLabelInterpreter','latex');
set(groot, 'defaultLegendInterpreter','latex');
%% Solve ODE
opt = odeset('RelTol',1e-10); % set ode tolerance
[t,x] = ode45(@(t,x) DYN_3DOF(t,x,S),tspan,x0,opt);
[~,u] = cellfun(@(t,x) DYN_3DOF(t,x.',S), num2cell(t), num2cell(x,2), 'uni',0); %get control inputs
u = cell2mat(u);
u = reshape(u,length(u)/length(t),[])'; %reshape control inputs
%% Plot Results - Static
% close all;
% figure
% plot_states_3DOF(t,x);
%
% figure
% plot_controls_3DOF(t,u,S.getNet,S.max_thrust);
%% Plot Results - Animation
close all;
plot_trajectory_2D(t, x, u, vehicle_scale, S);🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]展邦顺.欠驱动水下机器人路径规划和跟踪控制研究[D].青岛科技大学,2023.
[2]王芳,万磊,李晔,等.欠驱动AUV的运动控制技术综述[J].中国造船, 2010, 51(002):227-241.
[3]陈恩志,常健,李斌,等.采用干扰观测器的水下滑翔蛇形机器人纵倾运动控制[J].西安交通大学学报, 2020.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









