






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、引言
随着自动驾驶技术的迅猛发展,其在各个领域的应用潜力不断被挖掘,自动驾驶赛车作为该技术的前沿试验场,备受瞩目。传统自动驾驶方法在应对赛车场景的高度动态性、极端环境变化以及对极致操控性能的需求时,面临诸多挑战。混合模仿强化学习架构应运而生,它融合了模仿学习的高效性与强化学习的自主性、适应性,为实现高性能的自动驾驶赛车提供了创新途径。
二、混合模仿强化学习架构基础
(一)模仿学习 模仿学习旨在让智能体(自动驾驶赛车)通过观察专家示范,学习人类驾驶员或预先设定的最优驾驶策略。例如,收集专业赛车手在赛道上的驾驶数据,包括速度、转向、刹车等操作序列,以及对应的环境信息,如赛道曲率、与周围障碍物的距离等。智能体利用这些数据进行监督学习,试图复刻专家的驾驶行为,快速掌握基本的赛道通行方式,在相对稳定的场景下能够高效地行驶,节省大量的探索时间。
(二)强化学习 强化学习则将自动驾驶赛车视为一个处于动态环境中的智能体,依据环境反馈的奖励信号来学习最优策略。赛车每做出一个驾驶决策(如加速、转弯幅度调整等),环境都会根据其安全性、速度保持、赛道合规性等指标给予相应奖励。智能体通过不断试错,探索不同的决策组合,以最大化长期累积奖励。这使得赛车在面对复杂多变的赛道状况,如突发障碍物、对手赛车干扰、湿滑路面等,能自主调整策略,适应新情况。
三、架构融合方式
在混合架构中,模仿学习与强化学习相辅相成。初期,模仿学习占据主导,利用大量专家数据让赛车迅速熟悉赛道布局、常规驾驶流程,建立起初步的驾驶策略库,使赛车能在正常赛道条件下稳定行驶,达到较高的平均速度。随着驾驶场景的复杂化,强化学习逐渐介入。当遇到模仿学习未涵盖的异常情况,如赛道上突然出现的碎片、其他赛车碰撞后形成的临时路障等,强化学习模块基于实时环境反馈启动探索模式,尝试新的驾驶操作,并依据奖励机制优化策略。同时,强化学习获得的优化策略又反过来补充模仿学习的策略库,进一步完善赛车应对各种情况的能力。
四、关键技术与实现要点
(一)数据采集与预处理 要实现高质量的混合学习,海量且精准的驾驶数据不可或缺。一方面,通过车载传感器(激光雷达、摄像头、毫米波雷达等)全方位采集赛道、周边车辆、路况等信息;另一方面,邀请专业赛车手进行多轮次、多场景的驾驶测试,获取丰富的操作数据。采集后的数据需经过去噪、校准、特征提取等预处理步骤,确保输入到学习架构中的数据真实有效,能够准确反映驾驶场景与操作之间的关系。
(二)模型构建与训练 构建深度神经网络模型作为模仿学习与强化学习的载体。在模仿学习部分,采用卷积神经网络(CNN)等擅长处理图像数据的模型,对摄像头采集的视觉信息进行特征提取,结合循环神经网络(RNN)处理时序数据,以学习驾驶操作的动态序列。强化学习部分,基于深度 Q 网络(DQN)或其变体,将赛车的状态(如速度、位置、周围环境特征等)映射到不同决策的价值,通过不断更新 Q 值来优化策略。模型训练过程中,采用交替训练或联合训练的方式,平衡模仿学习的快速收敛性与强化学习的探索-利用权衡,确保赛车既能快速掌握基本技能,又能不断提升应对复杂情况的能力。
(三)实时决策与优化 在赛车实际运行过程中,系统需具备快速的实时决策能力。利用车载计算平台,根据当前传感器数据实时生成驾驶决策,确保在毫秒级的时间内响应。同时,持续收集新的驾驶数据,在线反馈给学习架构,对策略进行动态优化,使赛车能及时适应赛道条件、车辆性能变化以及对手策略调整等因素。
五、优势与应用前景
(一)优势 1. 高效学习:通过模仿学习快速上手,减少在简单场景下的探索时间,相比单纯的强化学习,能更快达到可接受的驾驶水平。 2. 强大适应性:强化学习赋予赛车应对复杂、未知情况的能力,在多变的赛车环境中,自主优化策略,确保安全与速度的平衡。 3. 策略进化:两种学习方式相互促进,随着经验积累,赛车的驾驶策略不断进化,性能持续提升。
(二)应用前景 1. 竞技赛车领域:有望打造出超越人类极限的赛车“选手”,在各类赛车赛事中展现卓越操控性能,推动赛车运动技术革新。 2. 民用自动驾驶研发:为普通道路上的自动驾驶汽车提供技术借鉴,提升车辆在复杂路况下的应对能力,加速民用自动驾驶的普及。 3. 智能交通系统:融入智能交通生态,与其他车辆、基础设施协同,提高交通效率,降低事故风险。
六、面临的挑战与解决方向
(一)挑战 1. 数据质量与多样性:获取高质量、涵盖各种极端情况的赛车数据难度较大,若数据存在偏差或不完整,会影响学习效果。 2. 模型复杂度与实时性矛盾:为应对复杂场景,模型复杂度不断增加,但车载计算资源有限,如何保证模型在实时决策时的运算速度是一大难题。 3. 安全与可靠性:赛车高速行驶,任何决策失误都可能导致严重事故,确保自动驾驶系统的安全可靠至关重要。
(二)解决方向 1. 数据增强与模拟技术:运用数据增强手段扩充现有数据,结合虚拟仿真环境,模拟各种罕见场景,丰富数据多样性。 2. 模型优化与硬件加速:采用模型压缩、量化等技术降低模型复杂度,同时研发更强大的车载计算芯片,提升运算速度。 3. 安全冗余设计:构建多重安全机制,如备份决策系统、故障检测与恢复模块,确保在主系统失效时仍能安全停车或维持基本行驶。
七、结论
使用混合模仿强化学习架构的自动驾驶赛车代表了自动驾驶技术在高速、动态场景下的创新突破。尽管面临诸多挑战,但随着技术的不断进步与完善,有望彻底改变赛车运动的面貌,并为民用自动驾驶领域注入强大动力,引领未来出行方式的变革。
📚2 运行结果
主函数部分代码:
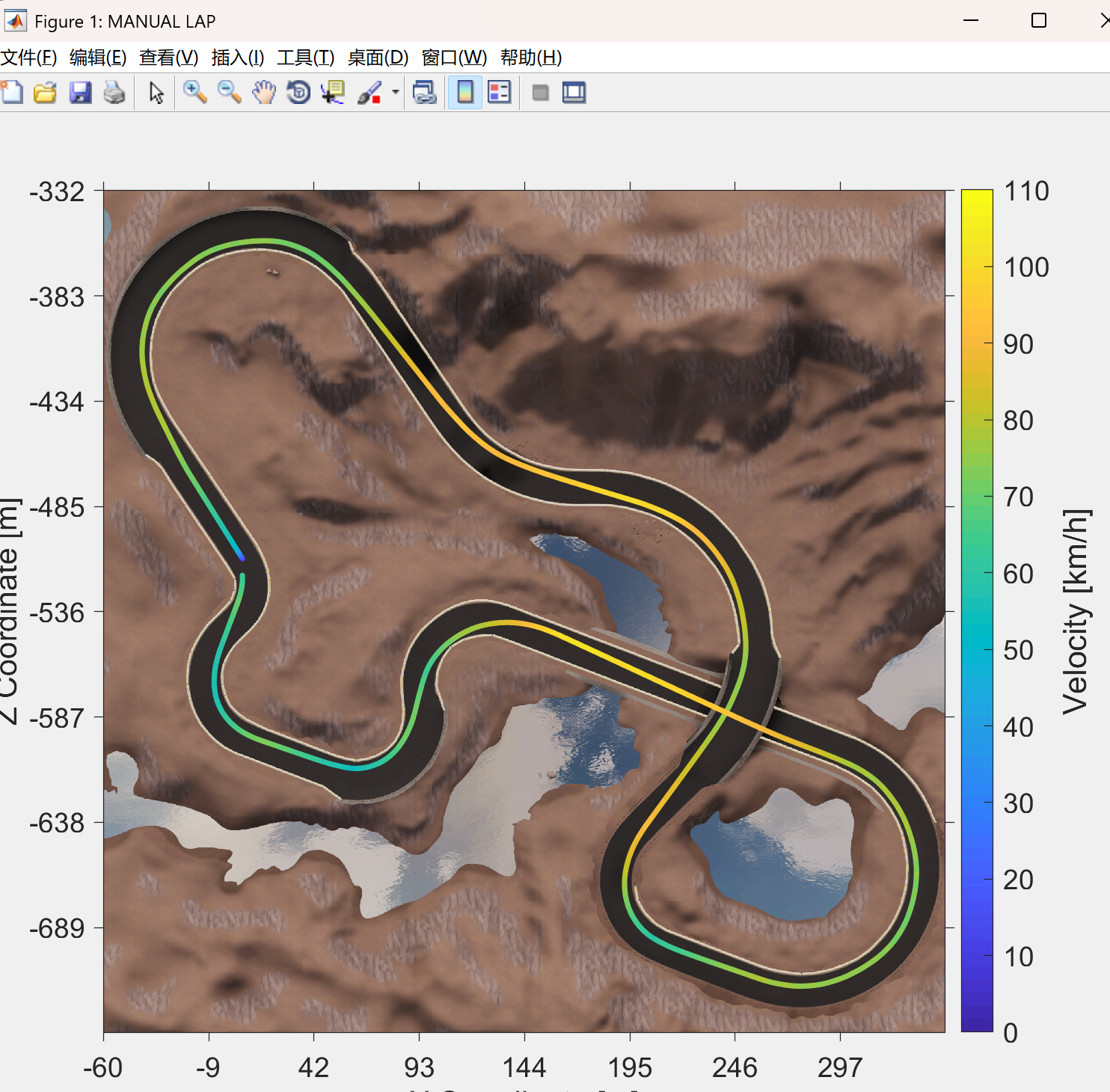
figure('Name','MANUAL LAP');
imshow(track);
hold on;
scatter(275+(4.6*ManualX(1:12710)),-1525-(4.6*ManualZ(1:12710)),5,ManualV); % Scaled and shifted scatter plot of vehicle position with 5 point size and velocity-based color-gradient
%text(275+(4.6*ManualX(1:1))+20,-1525-(4.6*ManualZ(1:1))-20,'START','Color','white','FontSize',16);
%text(275+(4.6*ManualX(12710:12710))+20,-1525-(4.6*ManualZ(12710:12710)),'FINISH','Color','white','FontSize',16);
axis on
xticks(1:233:1864); % Define equally spaced 8 ticks for x-axis
xticklabels(-60:51:348); % Define x-tick values based on metric units
yticks(1:233:1864); % Define equally spaced 8 ticks for y-axis
yticklabels(-1*(332:51:740)); % Define y-tick values based on metric units
xlabel('X Coordinate [m]'); % Define x-axis label
ylabel('Z Coordinate [m]'); % Define y-axis label
% title({'MANUAL LAP',''}); % Plot title
set(gca,'FontName','Arial','FontSize',14); % Font for the scatter plot
c = colorbar; % Colorbar instance
caxis([0 110]); % Colorbar limits
c.FontName = 'Arial'; % Font for colorbar
c.FontSize = 14; % Font size for colorbar ticks
c.Label.String = 'Velocity [km/h]'; % Colorbar label
c.Label.FontName = 'Arial'; % Font for colorbar label
c.Label.FontSize = 16; % Font size for colorbar label
colormap(parula) % Colorbar colormap
hold off;
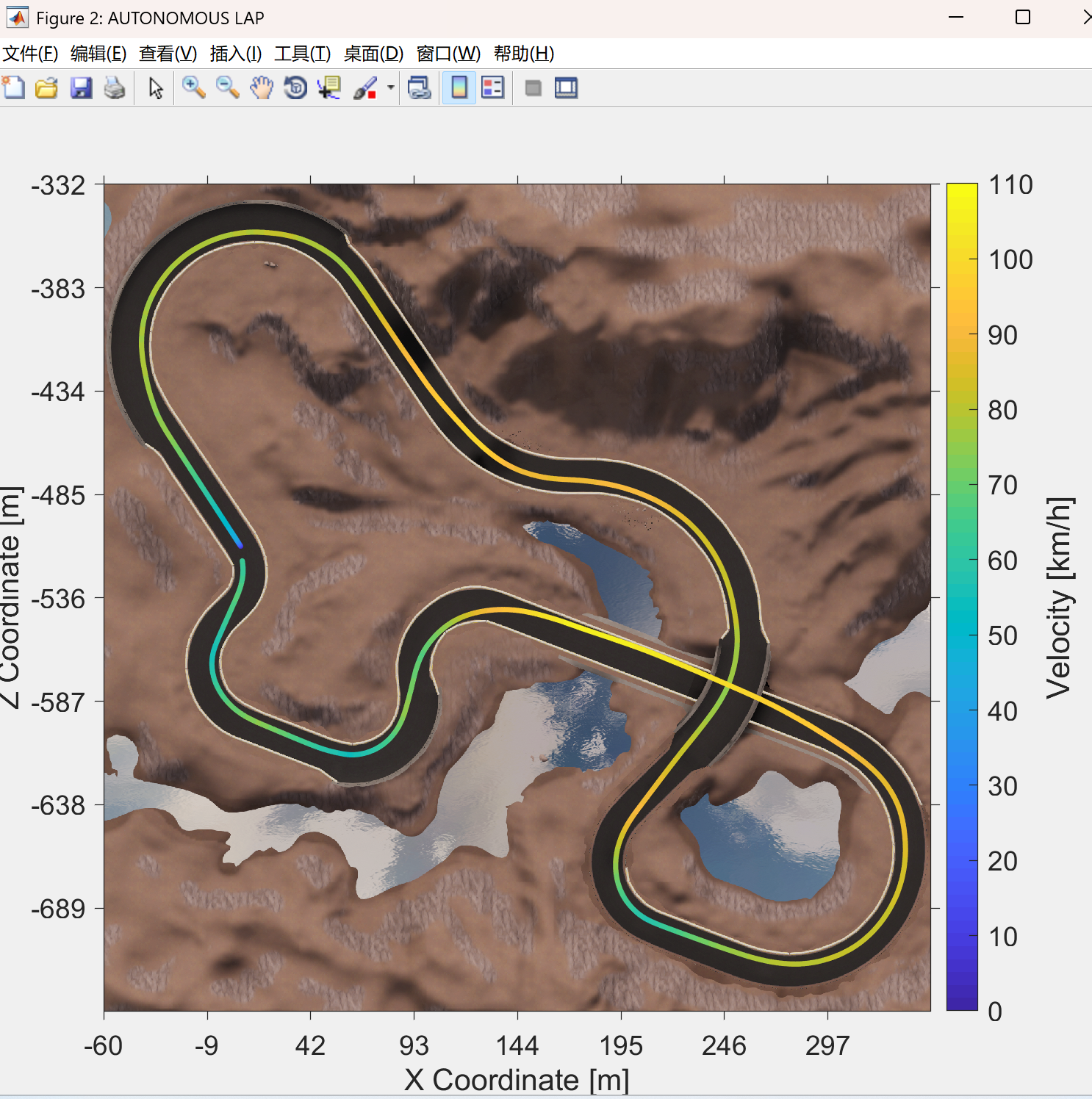
figure('Name','AUTONOMOUS LAP');
imshow(track);
hold on;
scatter(275+(4.6*AutonomousX(1:12518)),-1525-(4.6*AutonomousZ(1:12518)),5,AutonomousV); % Scaled and shifted scatter plot of vehicle position with 5 point size and velocity-based color-gradient
%text(275+(4.6*AutonomousX(1:1))+20,-1525-(4.6*AutonomousZ(1:1))-20,'START','Color','white','FontSize',16);
%text(275+(4.6*AutonomousX(12518:12518))+20,-1525-(4.6*AutonomousZ(12518:12518)),'FINISH','Color','white','FontSize',16);
axis on
xticks(1:233:1864); % Define equally spaced 8 ticks for x-axis
xticklabels(-60:51:348); % Define x-tick values based on metric units
yticks(1:233:1864); % Define equally spaced 8 ticks for y-axis
yticklabels(-1*(332:51:740)); % Define y-tick values based on metric units
xlabel('X Coordinate [m]'); % Define x-axis label
ylabel('Z Coordinate [m]'); % Define y-axis label
% title({'AUTONOMOUS LAP',''}); % Plot title
set(gca,'FontName','Arial','FontSize',14); % Font for the scatter plot
c = colorbar; % Colorbar instance
caxis([0 110]); % Colorbar limits
c.FontName = 'Arial'; % Font for colorbar
c.FontSize = 14; % Font size for colorbar ticks
c.Label.String = 'Velocity [km/h]'; % Colorbar label
c.Label.FontName = 'Arial'; % Font for colorbar label
c.Label.FontSize = 16; % Font size for colorbar label
colormap(parula) % Colorbar colormap
hold off;🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]关帅.基于双目立体视觉的自动驾驶赛车控制研究[D].北方工业大学,2022.DOI:10.26926/d.cnki.gbfgu.2022.000471.
[2]李荣粲.自动驾驶赛车最优轨迹规划与运动控制研究[D].东南大学,2022.DOI:10.27014/d.cnki.gdnau.2022.003016.
🌈4 Matlab代码实现



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









