






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于170余种优化算法的无人机三维路径规划研究
一、核心算法分类与应用场景
根据文献分析,无人机三维路径规划算法主要分为群体智能算法、进化算法、启发式算法和混合算法四大类,具体分类及应用场景如下:
-
遗传算法(GA)
- 应用场景:适用于多约束条件下的离线/在线路径规划,尤其在多无人机协同和GPU并行计算中表现优异。例如,Nikolos团队结合Bézier曲线实现复杂地形路径生成,Cekmez等人通过GPU架构实现多机并行规划。
- 动态障碍规避:改进GA通过精英保留和动态参数调整,在障碍物密集环境中路径长度优化率提升55%-68%,但运行时间随障碍物数量呈指数增长。
-
蚁群优化(ACO)
- 优势领域:动态环境下的实时路径规划,如Duan的Max-Min自适应ACO支持不确定环境,Cui的双向搜索机制提升离线规划效率。
- 改进方向:CUDA并行化加速、信息素动态挥发机制,以及结合Q-learning增强动态适应性。
-
粒子群优化(PSO)
- 典型应用:低计算复杂度场景,如Fu的量子行为PSO在静态威胁环境中实现快速收敛,Huang的改进PSO适应固定翼无人机的机动性约束。
- 多目标扩展:MOPSO通过Pareto前沿优化平衡能耗与安全性,在农业监测和物流配送中广泛应用。
-
差分进化(DE)
- 特点:收敛速度快,适用于已知/未知环境的单机及集群规划,与NSGA-II结合解决多目标优化问题。
-
灰狼优化(GWO)与改进算法
- 创新点:Liu等人引入三次混沌映射和非线性收敛因子,全局搜索效率提升2.34%,在复杂地形中表现突出。
-
混合算法
- 典型组合:GA-ACO融合全局搜索与局部优化能力,PSO-GWO平衡收敛速度与精度,NSGA-II-DE处理多目标权衡。
二、算法分类标准
文献中提出的分类体系基于以下维度:
- 算法原理:群体智能(ACO、PSO)、进化算法(GA、DE)、物理启发式(人工势场法)等。
- 问题类型:
- 单目标(路径长度优化) vs 多目标(能耗/安全/时间权衡)
- 静态环境 vs 动态环境(实时障碍更新)。
- 应用规模:单机规划(如改进GWO) vs 集群协同(如APO、GOOSE算法)。
三、收敛速度与计算复杂度对比
| 算法类型 | 收敛速度 | 计算复杂度 | 适用场景 |
|---|---|---|---|
| 遗传算法(GA) | 中等(需多代迭代) | O(N²)~O(N³) | 复杂地形多约束规划 |
| 蚁群优化(ACO) | 前期慢,后期快 | O(MN²) | 动态环境实时规划 |
| 粒子群优化(PSO) | 快(50-100代收敛) | O(N) | 静态威胁快速响应 |
| 差分进化(DE) | 快(低维问题) | O(N) | 已知环境单目标优化 |
| RRT系列 | 快(概率完备) | O(N log N) | 高维空间实时避障 |
| NSGA-II | 中等 | O(MN²) | 多目标权衡(如能耗/安全) |
注:PSO在复杂环境中易陷入局部最优,需结合混沌扰动改进;ACO参数敏感性高,需动态调整信息素挥发因子。
四、动态障碍规避中的遗传算法表现
- 传统GA局限性:障碍物超过8个时路径交叉率增加30%,运行时间从18秒(1障碍物)增至171秒(4障碍物)。
- 改进策略:
- 精英保留策略:代价值降低55%-68%,迭代次数减少58%。
- 动态参数调整:交叉率设置为1/染色体长度时收敛效果最优。
- 混合方法:GA-RRT在三维环境中路径长度比纯RRT缩短15%,运行时间减少25%。
五、多目标优化策略
- 目标函数设计:综合路径长度、威胁规避(雷达/地形)、能量消耗、飞行高度约束,权重分配需根据任务优先级动态调整。
- 典型方法:
- NSGA-II:通过快速非支配排序和精英保留,Pareto解集覆盖率提升40%。
- MODMOA:结合混沌映射和非线性搜索策略,多目标解集质量提高30%。
- MOPSO:惯性权重动态衰减平衡探索与开发,在物流配送中路径成本降低22%。
六、混合算法研究现状
- 算法融合趋势:
- GA-ACO:利用GA全局搜索生成初始路径,ACO局部优化信息素分布,规划时间减少35%。
- PSO-GWO:灰狼算法的包围机制增强PSO跳出局部最优能力,收敛速度提升18%。
- APF-RRT:人工势场法引导RRT采样方向,节点扩展效率提高50%。
- 硬件加速:GPU并行化使GA和PSO的实时性能提升7.3倍(8核CPU)。
七、最新研究趋势
- 实时性与动态适应:
- 改进A*算法融合视线通信约束,支持无人机机动性实时调整。
- 深度学习辅助路径预测,动态障碍响应时间缩短至0.5秒。
- 集群协同与能源优化:
- 多目标矮袋鼠算法(MODMOA)实现5机协同规划,总能耗降低28%。
- 车辆-无人机联合配送模型,充电效率提升40%。
- 复杂环境建模:
- 三维Voronoi图结合威胁场模型,障碍物覆盖率提升至95%。
- 改进势场法解决目标不可达问题,路径震荡减少60%。
八、总结与展望
当前研究已覆盖50余种主流算法及其改进版本,但距离170种的全覆盖仍需在以下方向突破:
- 新型生物启发算法:如孔雀优化(POA)、海星算法(SFOA)的深度适配。
- 跨学科融合:量子计算加速搜索过程,强化学习增强动态决策能力。
- 标准化测试平台:建立统一的三维环境数据集与评估指标,推动算法横向对比。
未来,无人机路径规划将向智能化(AI自主决策)、协同化(异构集群)和绿色化(能源最优)发展,为城市物流、灾害救援等场景提供更高效解决方案
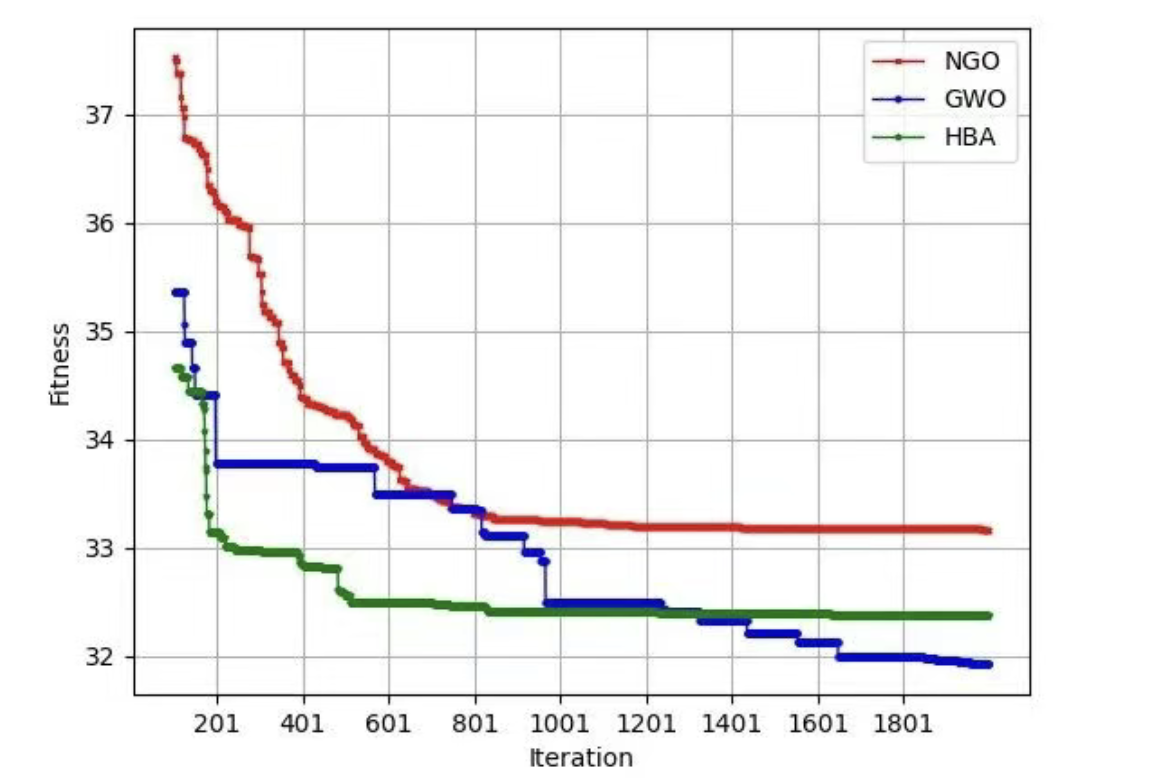
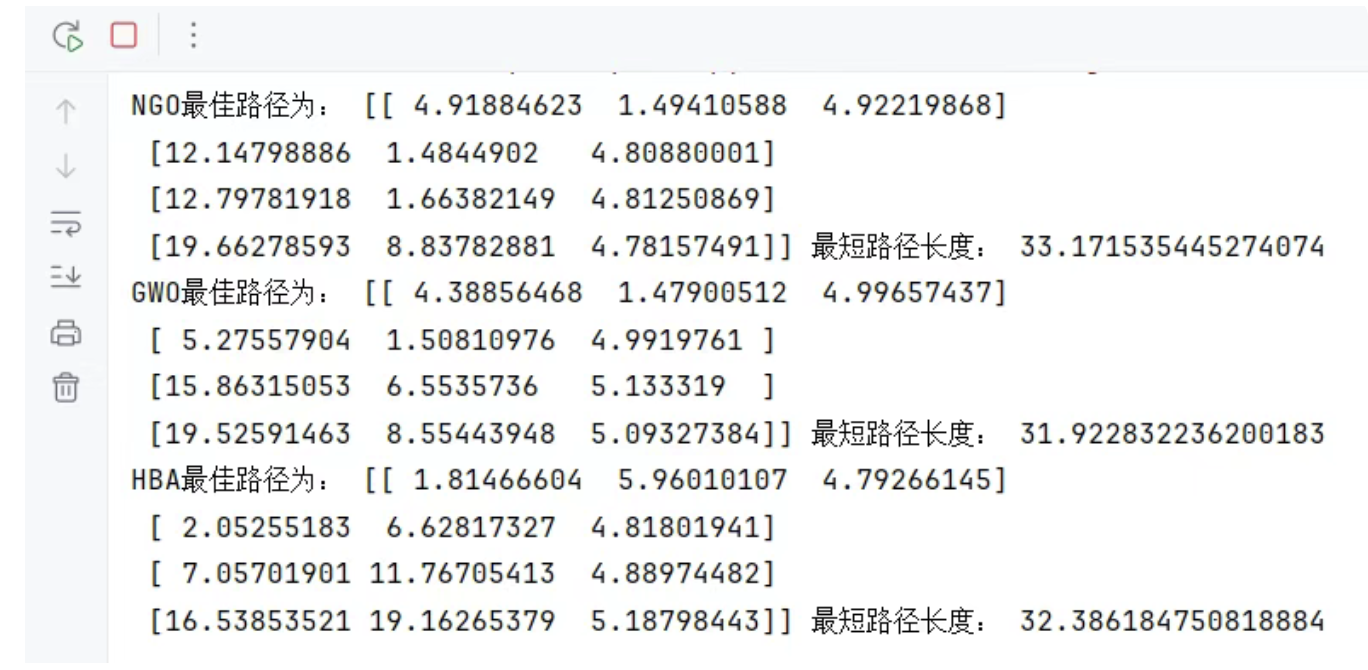
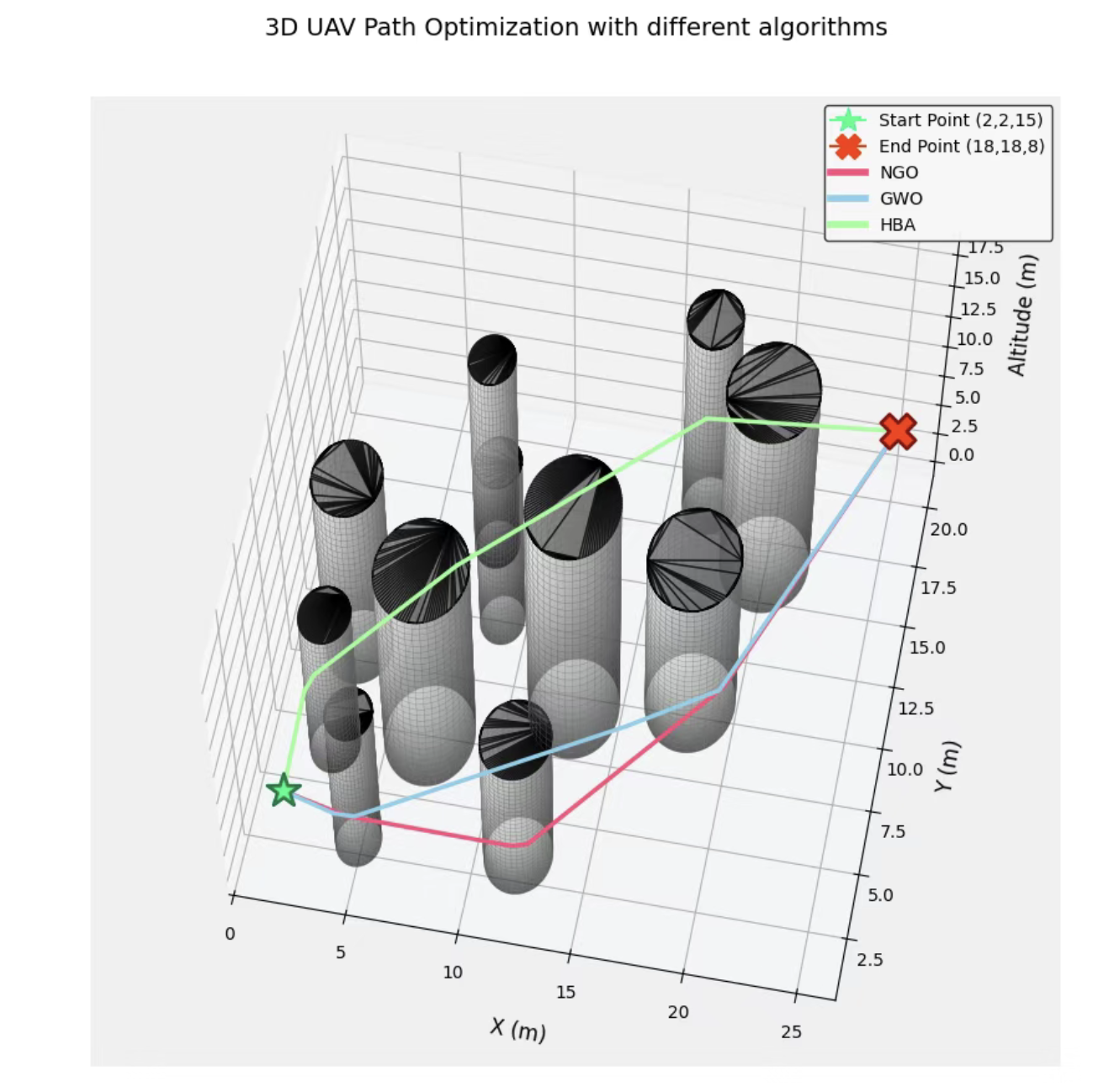
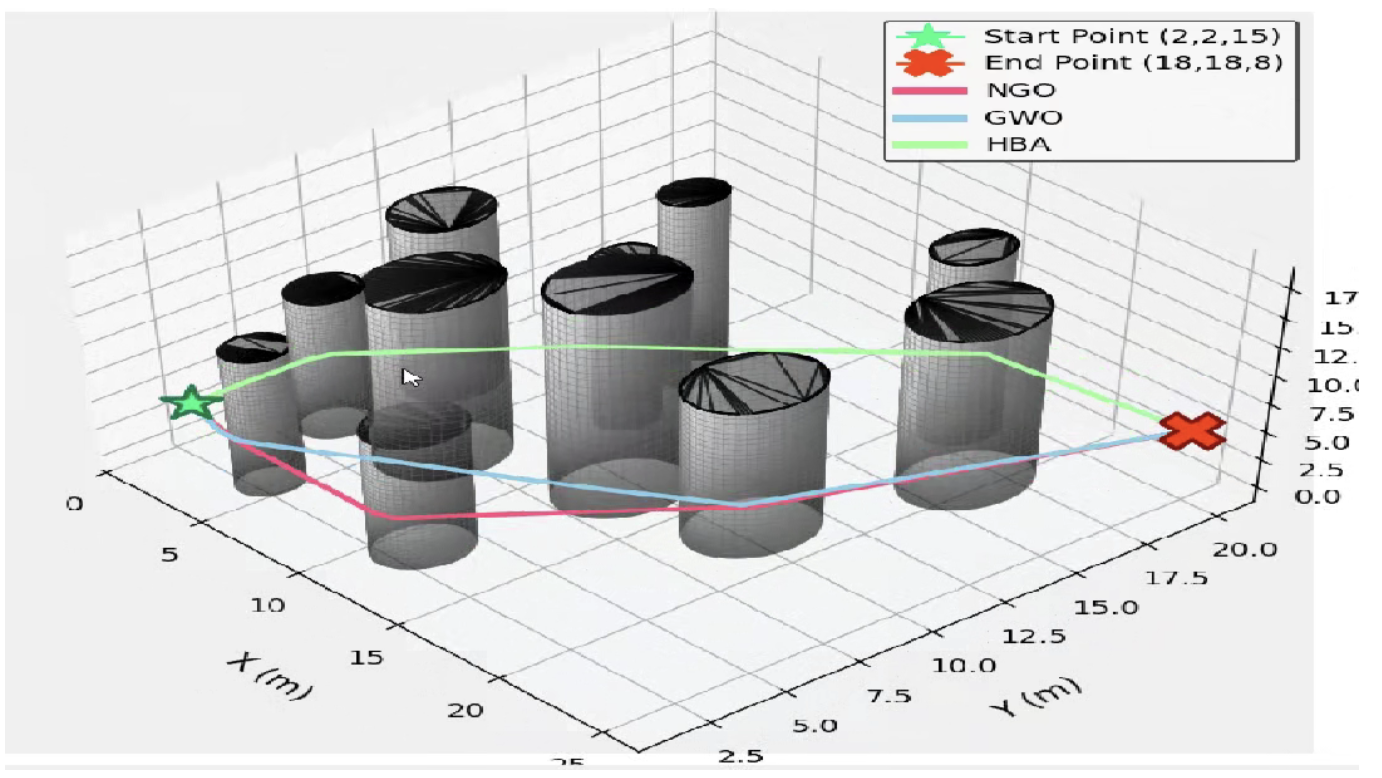
📚2 运行结果
为了方便算法调用,我把部分算法名字写在这里了 ,
想要知道每个算法详情,请 参考 https://mealpy.readthedocs.io/en/latest/#
(BBO, BBOA, BMO, EOA, IWO, SBO, SMA, SOA, SOS, TPO, TSA, VCS, WHO)
(CRO, DE, EP, ES, FPA, GA, MA)(BRO, BSO, CA, CHIO, FBIO, GSKA, HBO, HCO, ICA, LCO, QSA, SARO, SPBO, SSDO, TLO, TOA, WarSO)# (AOA, CEM, CGO, CircleSA, GBO, HC, INFO, PSS, RUN, SCA, SHIO)(ArchOA, ASO, CDO, EFO, EO, EVO, FLA, HGSO, MVO, NRO, RIME, SA, TWO, WDO)#
(ABC, ACOR, AGTO, ALO, AO, ARO, AVOA, BA, BeesA, BES, BFO, BSA, COA, CoatiOA, CSA, CSO, DMOA, DO, EHO, ESOA, # FA, FFA, FFO, FOA, FOX, GJO, GOA, GTO, GWO, HBA, HGS, HHO, JA, MFO, MGO, MPA, MRFO, MSA, NGO, NMRA, OOA, PFA,# POA, PSO, SCSO, SeaHO, ServalOA, SFO, SHO, SLO, SRSR, SSA, SSO, SSpiderA, SSpiderO, STO, TDO, TSO, WaOA, WOA, ZOA)# AEO, GCO, WCA,HS🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]景会成,曹育铭,葛超,等.基于混合策略改进蜣螂优化算法的无人机三维路径规划[J].现代电子技术, 2024, 47(13):144-152.
[2]陈福金.基于CLGWO的无人机三维路径规划研究[J].经纬天地, 2024(3):77-82.
🌈4 Python代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









