






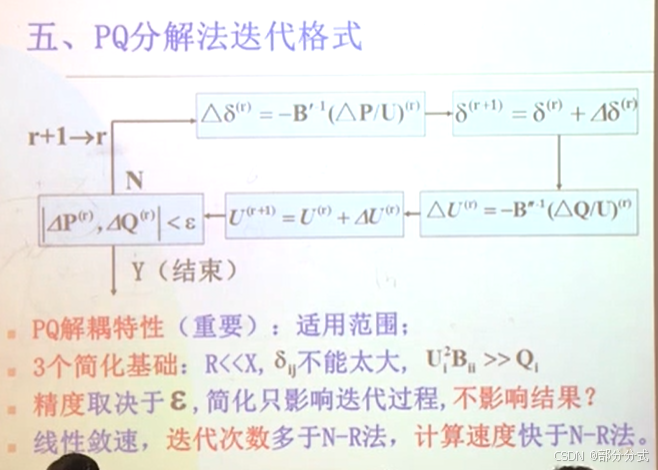
这张图片展示的是一个与电气工程或物理学相关的研究步骤流程图,可能与电压、电流和相关量的计算或调整方法有关。具体内容可以总结为以下几个步骤:
-
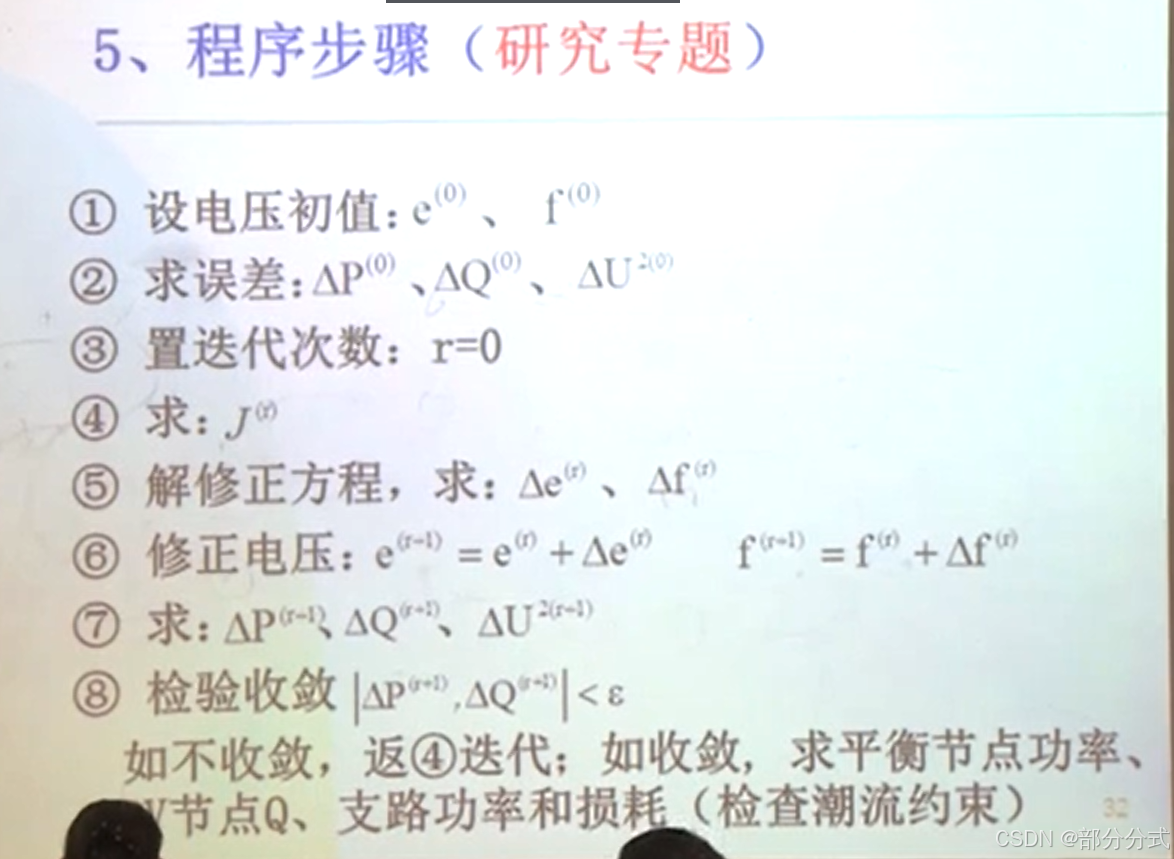
设定电压初值:
- 电压的初值被设定为 ( e^{(0)} ) 和 ( f^{(0)} ),这里可能是某种电路的初始电压值。
-
求误差差:
- 计算误差差,例如 ( \Delta P^{(0)} ), ( \Delta Q^{(0)} ), ( \Delta U^{(0)} ),这些可能是关于功率、能量或电压等方面的误差。
-
设定迭代次数:
- 将迭代次数设定为 ( r = 0 ),这是一个初始值,表示开始迭代过程。
-
求解 J:
- 计算 ( J ),可能是某种优化或调整量的目标函数。
-
修正步骤:
- 通过修正算法求解 ( \Delta e^{®} ) 和 ( \Delta f^{®} ),这可能是电压或其他量的调整值。
-
修正电压:
- 使用修正后的值更新电压:
[
e^{®} = e^{(r-1)} + \Delta e^{®}
]
[
f^{®} = f^{(r-1)} + \Delta f^{®}
]
这里的公式表示将修正量加到前一步的值上。
- 使用修正后的值更新电压:
-
求解新的误差差:
- 继续计算新的误差差: ( \Delta P^{(r-1)} ), ( \Delta Q^{(r-1)} ), ( \Delta U^{(r-1)} )。
-
检查收敛性:
- 判断误差是否满足收敛条件: ( | \Delta P^{(r+1)}, \Delta Q^{(r+1)} | < \epsilon ),如果收敛,就结束迭代。如果不收敛,则返回步骤 4 继续迭代。
- 如果误差满足要求,进一步求解平衡节点功率,支路功率和损耗等。
总体来说,这张图描述的是一个迭代求解过程,通常用于电力系统分析、数值计算或优化算法中的误差修正过程。
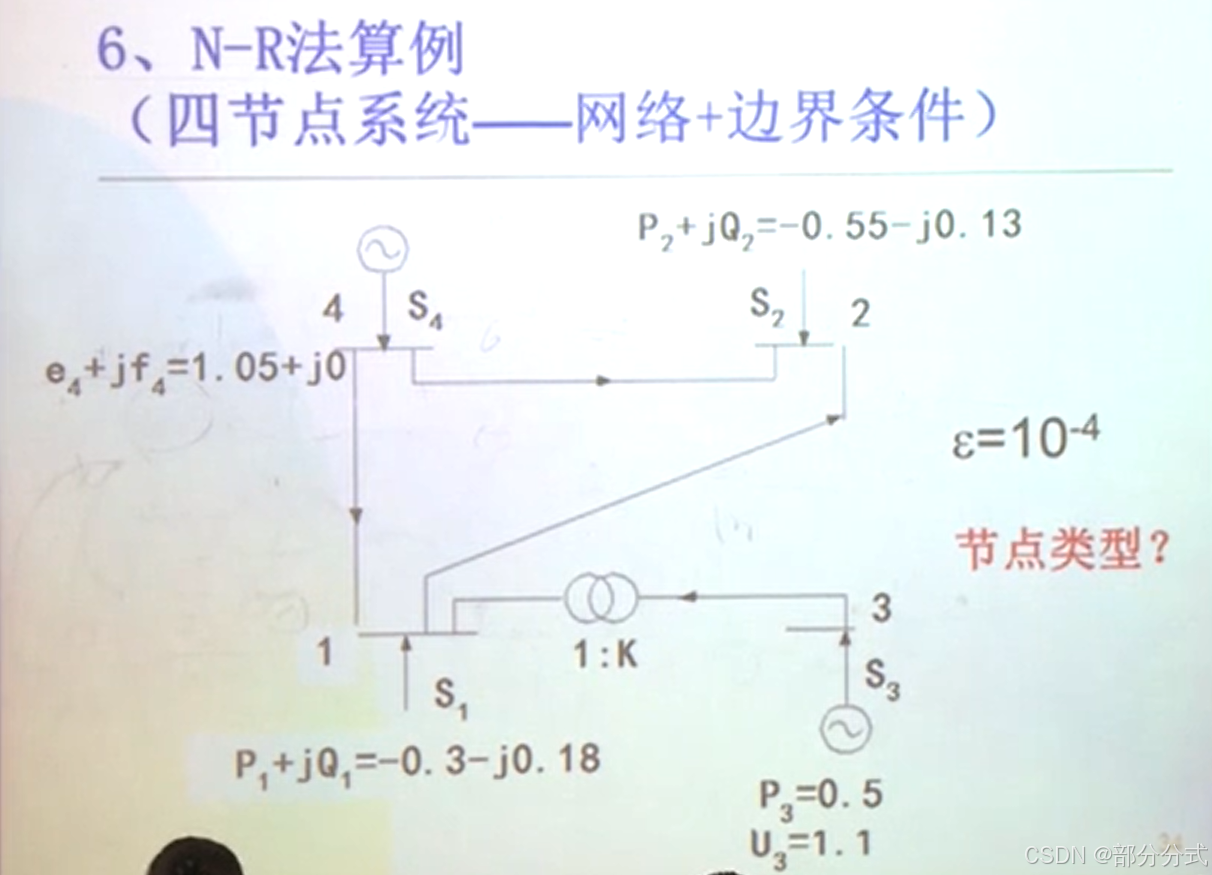
这张图片展示的是一个四节点电力系统的 N-R 法(牛顿-拉夫森法)计算例子。牛顿-拉夫森法常用于电力系统的潮流计算,特别是在复杂的电力网络中,帮助确定各个节点的电压值、功率等关键参数。我们可以更详细地讨论图片中的内容:
1. 电力系统的网络拓扑
- 四个节点:图中共有四个节点,分别标记为1、2、3、4。每个节点代表电力系统中的一个电力交换点。
- 系统连接:图中节点通过不同的阻抗(S1、S2、S3、S4)相连,表示节点间的线路或变压器的电气连接。不同的阻抗值影响电力传输的效率和电压损耗。
2. 节点的电压和功率信息
每个节点都有相应的电压和功率信息,使用复数形式表示。
- 节点1:
- 功率 ( P_1 + jQ_1 = -0.3 - j0.18 ),表示节点1的复功率,包含了有功功率和无功功率的部分。
- 节点2:
- 功率 ( P_2 + jQ_2 = -0.55 - j0.13 ),同样表示节点2的复功率。
- 节点3:
- 电压 ( U_3 = 1.1 ),表示节点3的电压大小为1.1(通常表示为标幺值),同时给出有功功率 ( P_3 = 0.5 )。
- 节点4:
- 电压 ( e_4 + jf_4 = 1.05 + j0 ),表示节点4的复电压,其中虚部为零,可能是一个简化的表达方式。
3. 阻抗(S)
每两个节点之间有一个连接的阻抗(标记为 S1, S2, S3, S4),这些阻抗代表了节点间电力传输的电气特性。每个阻抗值都对电力流动和电压变化产生影响。
4. 牛顿-拉夫森法(N-R法)
- 这个例子应用了牛顿-拉夫森法来解决电力潮流问题。牛顿-拉夫森法是一种迭代方法,常用于求解非线性方程组。在电力系统分析中,它用于计算每个节点的电压大小和相角,直到满足预设的收敛条件。
- 收敛条件:图中给出的收敛条件 ( \epsilon = 10^{-4} ) 表示,计算将在误差小于该阈值时停止,通常用于控制迭代的精度。
5. 节点类型
- 图右侧的红色问题“节点类型?”询问该系统中各个节点的类型。在电力潮流计算中,节点一般分为三类:
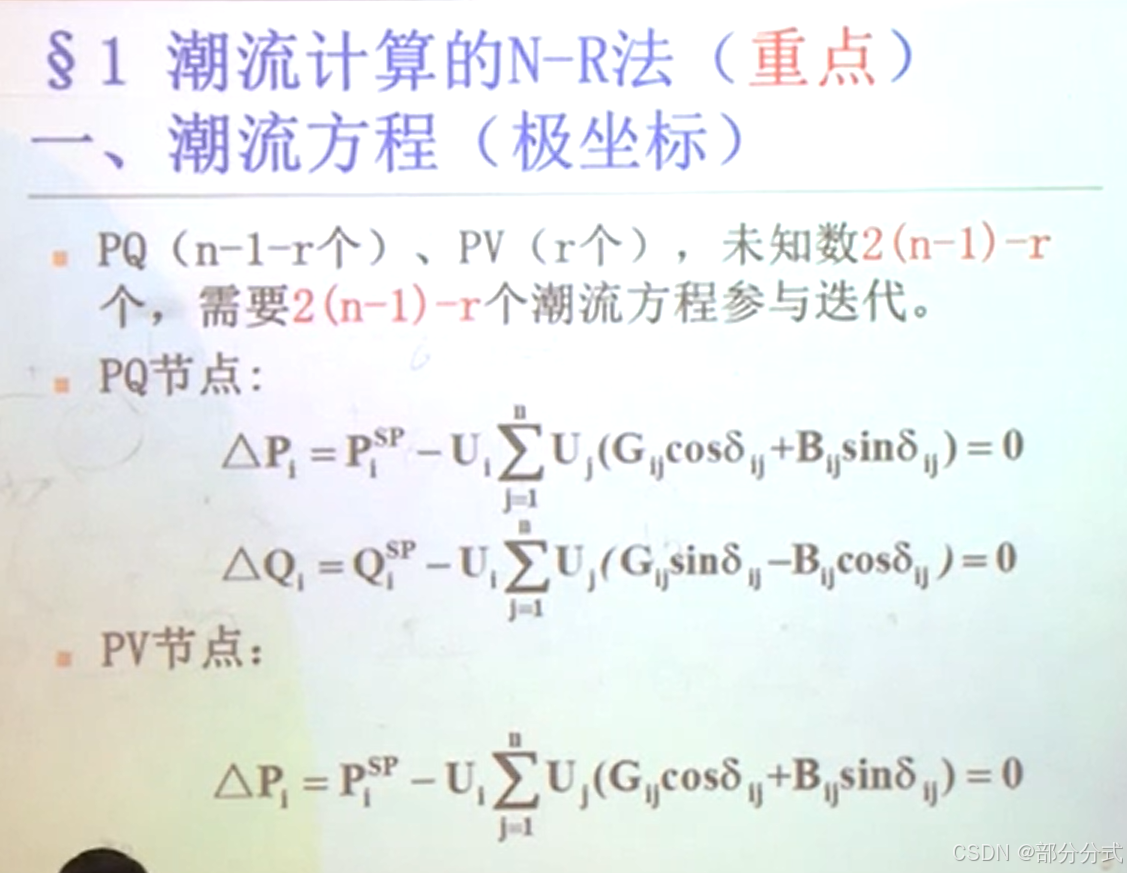
- PQ节点(负荷节点):给定负荷功率 ( P ) 和 ( Q )。
- PV节点(发电机节点):给定电压幅值和有功功率 ( P )。
- 平衡节点(Slack节点):通常电压相角为零,且用于平衡系统中的功率差异,负责补充系统的功率需求。
6. 如何根据数据判断节点类型
根据提供的数据,可以推测:
- 节点3 是一个 PV节点,因为它给定了电压大小(( U_3 = 1.1 ))和有功功率(( P_3 = 0.5 ))。
- 节点1、节点2 和 节点4 可以是 PQ节点,它们给定了负荷的功率(有功和无功功率)。
总结:
这张图片展示了四节点电力系统的潮流计算,使用了牛顿-拉夫森法来求解节点的电压和功率。通过图示的复杂数据和公式,可以得出各个节点的类型,并通过迭代方法计算出电力系统的稳定状态。这对于电力系统的设计、优化和调度至关重要。
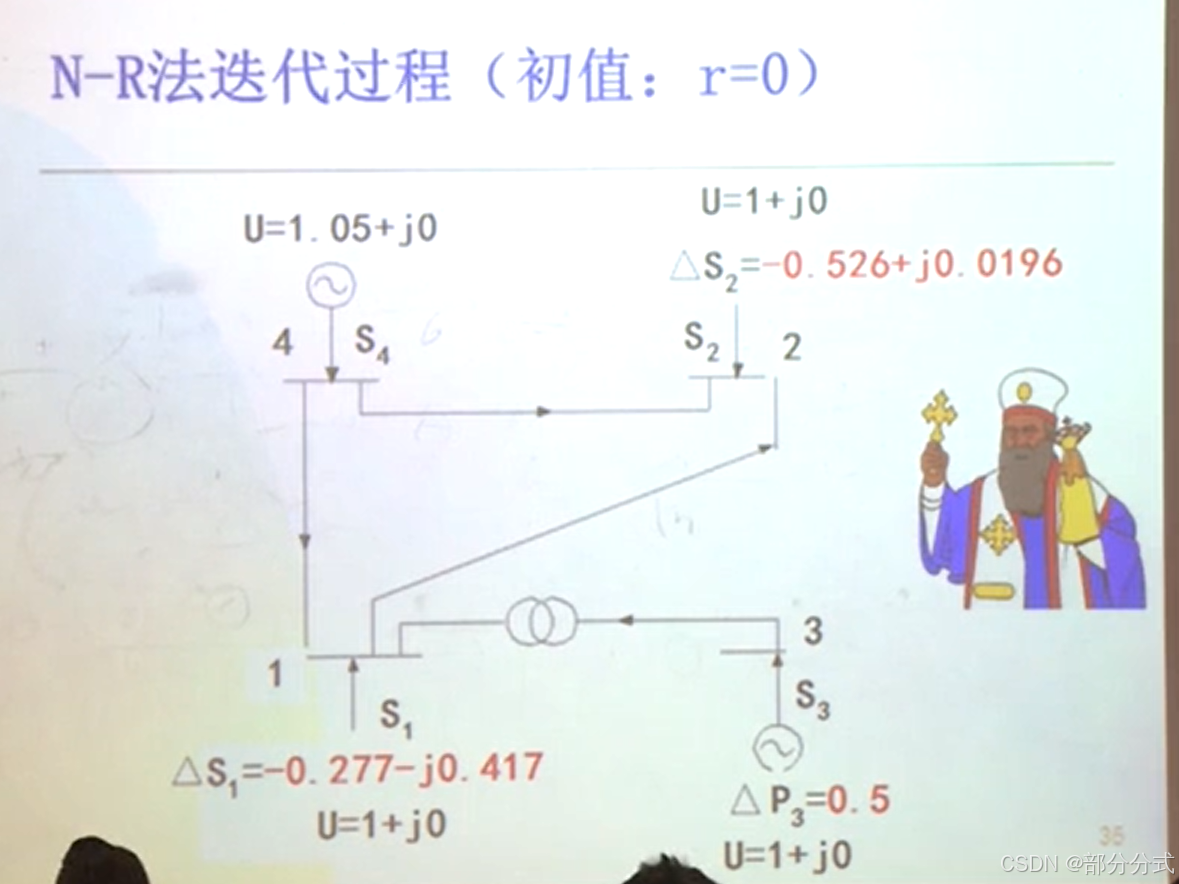
这几张图片展示的是使用牛顿-拉夫森(N-R)法进行的电力系统潮流计算过程,每一张展示了迭代的不同阶段。我们可以逐步分析每次迭代的变化,并理解如何逐步逼近稳定的解决方案。
迭代过程背景
在电力系统的潮流计算中,牛顿-拉夫森法是一种常用的数值方法,通常用于计算电力系统中的电压大小、电压相角、功率和功率流动等。每次迭代会根据上一次的结果修正电压值,直到误差满足设定的收敛标准。
第 0 次迭代(初始值)
在第 0 次迭代中,系统初始化了电压的初值并计算了误差。以下是步骤:
- 电压初值设定:设定了每个节点的初始电压值。比如节点 1 的电压为 ( e^{(0)} ),节点 2 和节点 3 的电压也被初始化为特定的值。
- 误差差计算:计算了功率误差,包括有功功率和无功功率。
- 设定迭代次数:初始设定为 ( r = 0 ),表示刚开始进行迭代。
- 修正步骤:计算了各个节点的修正量,如电压的修正量 ( \Delta e ) 和功率的修正量。
结论:这个阶段是开始阶段,系统基于初始假设来计算各个电压值和功率误差,准备进入迭代计算。
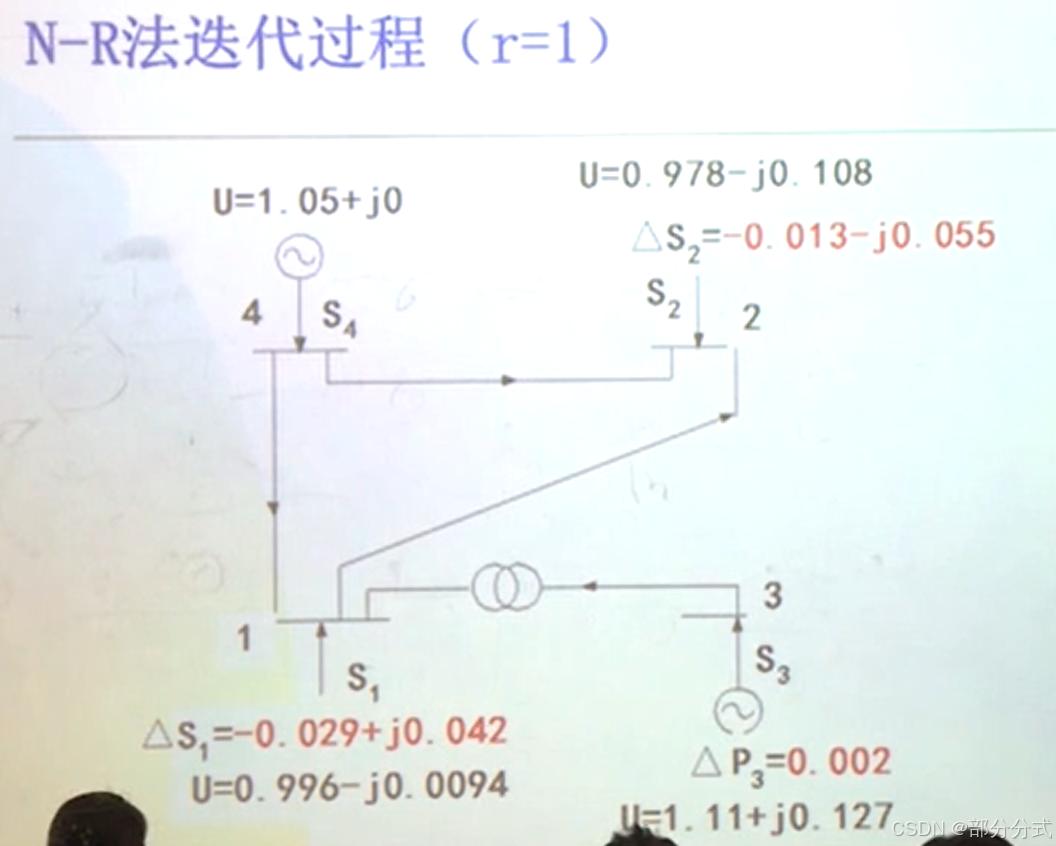
第 1 次迭代(r=1)
在第 1 次迭代中,系统已经开始根据上一次的结果对电压和功率进行调整。
-
电压修正:节点电压经过一次修正,更新了节点 1、节点 2、节点 3 和节点 4 的电压值。比如,节点 1 的电压从初始值 ( 1 + j0 ) 修正为 ( 0.996 - j0.0094 ),节点 2 和节点 3 的电压也相应更新。
-
误差差计算:在第一次迭代中,系统计算了误差差,并得到了各个节点的误差值。比如,节点 2 到节点 4 之间的功率误差有一定变化。
-
电压和功率流动:根据修正的电压,系统继续计算电力流动(如阻抗 S1, S2, S3 等),并应用于下一轮的计算。
-
收敛性检查:在第 1 次迭代后,系统会检查误差是否满足收敛条件 ( \epsilon = 10^{-4} )。如果误差仍然较大,则进入下一次迭代。
结论:第一次迭代的电压已经有所调整,并为下一步的修正做准备。
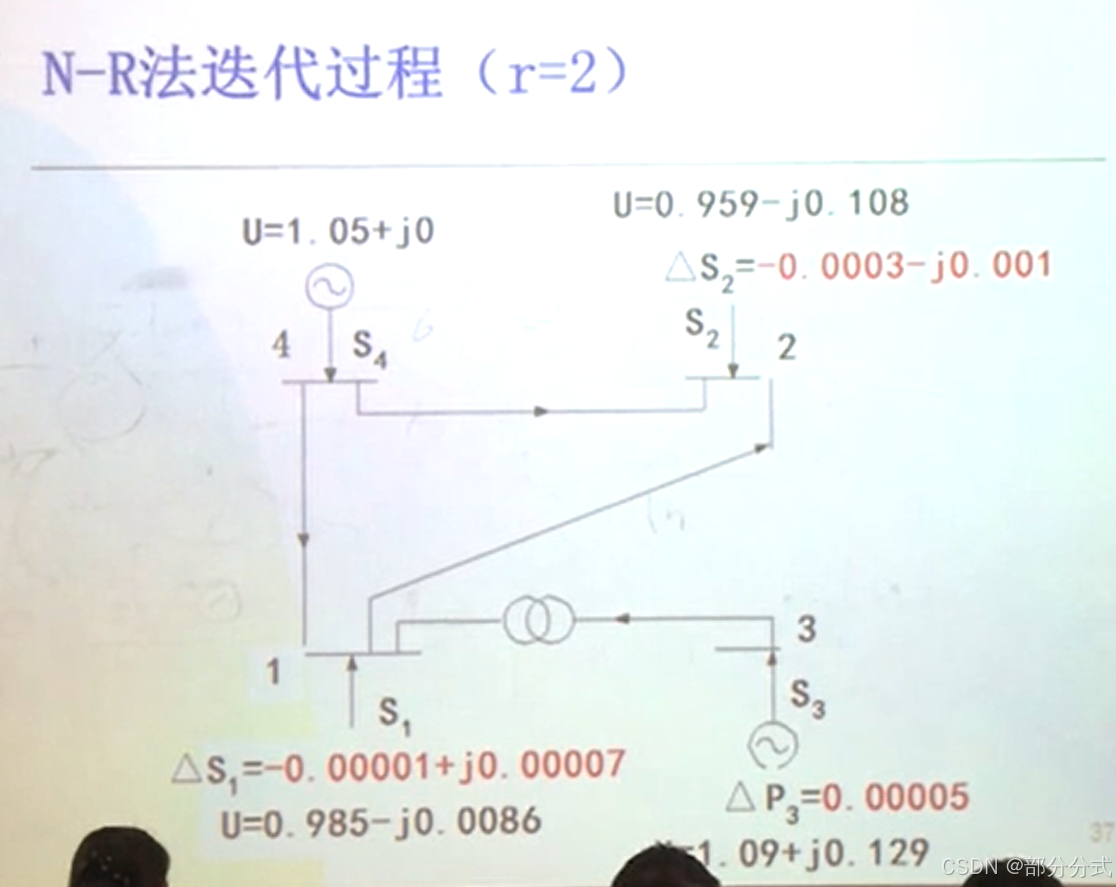
第 2 次迭代(r=2)
在第 2 次迭代中,电压和功率的修正更加细致,系统逐渐逼近正确的解。
-
电压进一步修正:节点 1、节点 2、节点 3 的电压继续被调整,电压的变化量逐步减小。比如,节点 1 的电压变为 ( 0.985 - j0.05 ),节点 2 的电压变为 ( 0.959 - j0.108 )。
-
更小的修正量:随着迭代次数的增加,电压和功率的变化量(delta values)变得越来越小。例如,节点 1 到节点 4 之间的修正量为 ( \Delta S_1 = -0.029 + j0.042 ),这表明系统的调整量已经较小,且系统趋于稳定。
-
收敛条件:如果误差足够小,系统会结束迭代过程。但如果误差仍然较大,系统会继续迭代。
结论:经过第二次迭代后,系统的电压变化逐渐减小,收敛速度加快,误差开始减小,电力传输逐渐稳定。
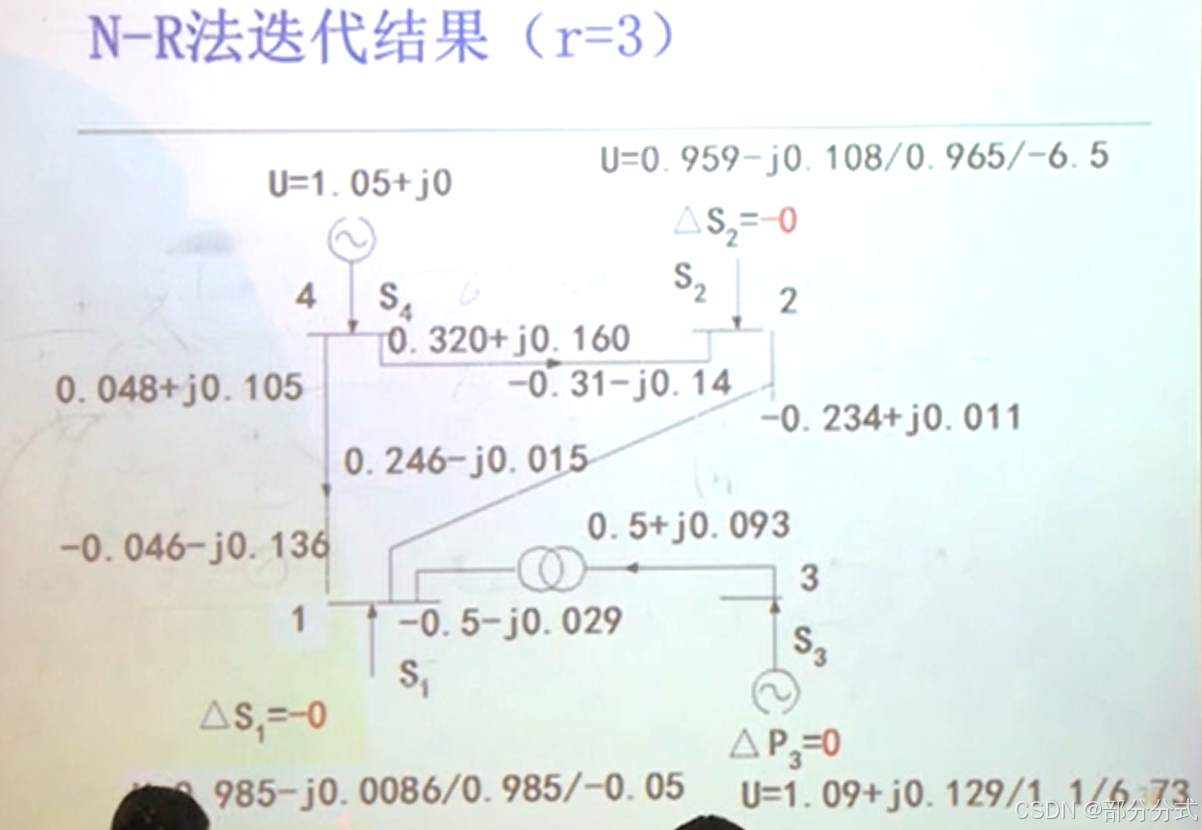
第 3 次迭代(r=3)
在第 3 次迭代中,系统的电压值已经接近最终的稳定值,误差几乎为零。
-
电压收敛:节点 1、节点 2、节点 3 的电压已经几乎收敛。比如,节点 1 的电压变为 ( 0.985 - j0.05 ),节点 2 的电压为 ( 0.959 - j0.108 ),节点 3 的电压为 ( 1.09 + j0.093 )。这些电压值表明系统已经接近稳定状态。
-
功率误差为零:在第 3 次迭代后,系统的功率误差 ( \Delta P_3 = 0 ) 和功率流动误差 ( \Delta S_1 = 0 ), ( \Delta S_2 = 0 ) 等都为零,说明系统已经达到了平衡。
-
最终结果:随着迭代次数的增加,电压和功率值逐渐收敛,系统不再需要进一步的调整。
结论:通过第三次迭代,系统的电压和功率流动已经完全收敛,误差为零,迭代过程完成,达到了最终的稳定解。
总结
- 迭代过程:牛顿-拉夫森法通过逐步修正电压和功率误差,帮助系统达到稳定状态。每一次迭代都会基于上一次的结果修正当前的电压和功率,直到误差足够小,系统收敛。
- 收敛速度:随着迭代的进行,电压和功率的变化逐渐减小,表明系统趋于稳定,最后在第 3 次迭代时,电力系统的所有节点达到了稳定的电压和功率流动。
通过这些迭代,电力系统的稳态解被逐渐逼近,最终实现系统的平衡状态。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









