






在RT-Thread实时操作系统中,任务采用了线程来实现,线程是RT-Thread中最基本的调度单位,它描述了一个任务执行的上下文关系,也描述了这个任务所处的优先等级。重要的任务能拥有相对较高的优先级,非重要的任务优先级可以放低,并且可以类似Linux一样具备分时的效果。
一、线程调度器
RT-Thread中提供的线程调度器是基于优先级的全抢占式调度:在系统中除了中断处理 函数、调度器上锁部分的代码和禁止中断的代码是不可抢占的之外,系统的其他部分都是可以抢占的,包括线程调度器自身。系统总共支持256个优先级(0 ~ 255,数值越小的优先级越高,0为最高优先级,255分配给空闲线程使用,一般用户不使用。在一些资源比较紧张的系统中,可以根据实际情况选择只支持8个或32个优先级的系统配置)。在系统中,当有比当前线程优先级更高的线程就绪时,当前线程将立刻被换出,高优先级线程抢占处理器运行。
如图 线程就绪优先级队列 所示,在RT-Thread调度器的实现中,包含了一个共256个优先级队列的数组(如果系统最大支持32个优先级,那么这里将是一个包含了32个优先级队列的数组),每个数组元素中放置相同优先级链表的表头。这些相同优先级的列表形成一个双向环形链表,最低优先级线程链表一般只包含一个idle线程。
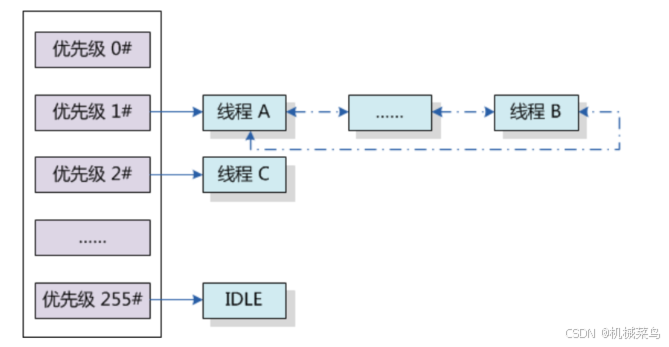
在优先级队列1#和2#中,可以看到三个线程:线程A、线程B和线程C。由于线程A、B的优先级比线程C的高,所以此时线程C得不到运行,必须要等待优先级队列1#的中所有线程(因为阻塞)都让出处理器后才能得到执行。
RT-Thread内核中也允许创建相同优先级的线程。相同优先级的线程采用时间片轮转方式进行调度(也就是通常说的分时调度器),时间片轮转调度仅在当前系统中无更高优先级就绪线程存在的情况下才有效。例如在线程就绪优先级队列图中,我们假设线程A和线程B一次最大允许运行的时间片分别是10个时钟节拍和7个时钟节拍。那么线程B将在线程A的时间片结束(10个时钟节拍)后才能运行,但如果中途线程A被挂起了,即线程A在运行的途中,因为试图去持有不可用的资源,而导致线程状态从就绪状态更改为阻塞状态,那么线程B会因为其优先级成为系统中就绪线程中最高的而马上运行。每个线程的时间片大小都可以在初始化或创建这个线程时指定。
因为RT-Thread调度器的实现是采用优先级链表的方式,所以系统中的总线程数不受限制,只和系统所能提供的内存资源相关。为了保证系统的实时性,系统尽最大可能地保证高优先级的线程得以运行。线程调度的原则是一旦任务状态发生了改变,并且当前运行的线程优先级小于优先级队列组中线程最高优先级时,立刻进行线程切换(除非当前系统处于中断处理程序中或禁止线程切换的状态)。
二、线程控制块
线程控制块是操作系统用于控制线程的一个数据结构,它会存放线程的一些信息,例如优先级,线程名称等,也包含线程与线程之间连接用的链表结构,线程等待事件集合等。 在RT-Thread实时操作系统中,线程控制块由结构体struct rt_thread表示。另外一种C 表达方式rt_thread_t,表示的是线程的句柄,在C语言中的实现是指向线程控制块的指针,详细定义情况见以下代码:
/* rt_thread_t线程句柄,指向线程控制块的指针 */
typedef struct rt_thread* rt_thread_t;
/*
* 线程控制块
*/
struct rt_thread
{
/* RT-Thread根对象定义 */
char name[RT_NAME_MAX]; /* 对象的名称*/
rt_uint8_t type; /* 对象的类型*/
rt_uint8_t flags; /* 对象的参数*/
#ifdef RT_USING_MODULE
void *module_id; /* 线程所在的模块ID*/
#endif
rt_list_t list; /* 对象链表*/
rt_list_t tlist; /* 线程链表*/
/* 栈指针及入口 */
void* sp; /* 线程的栈指针*/
void* entry; /* 线程入口*/
void* parameter; /* 线程入口参数*/
void* stack_addr; /* 线程栈地址*/
rt_uint16_t stack_size; /* 线程栈大小*/
rt_err_t error; /* 线程错误号*/
rt_uint8_t stat; /* 线程状态 */
/* 优先级相关域 */
rt_uint8_t current_priority; /* 当前优先级*/
rt_uint8_t init_priority; /* 初始线程优先级*/
#if RT_THREAD_PRIORITY_MAX > 32
rt_uint8_t number;
rt_uint8_t high_mask;
#endif
rt_uint32_t number_mask;
#if defined(RT_USING_EVENT)
/* 事件相关域 */
rt_uint32_t event_set;
rt_uint8_t event_info;
#endif
rt_ubase_t init_tick; /* 线程初始tick*/
rt_ubase_t remaining_tick; /* 线程当次运行剩余tick */
struct rt_timer thread_timer; /* 线程定时器*/
/* 当线程退出时,需要执行的清理函数 */
void (*cleanup)(struct rt_thread *tid);
rt_uint32_t user_data; /* 用户数据*/
};其中init_priority是线程创建时指定的线程优先级,在线程运行过程当中是不会被改变的 (除非用户执行线程控制函数进行手动调整线程优先级)。cleanup成员是RT-Thread 1.0.0中新引入的成员,它会在线程退出时,被idle线程回调一次以执行用户设置的清理现场等工作。最后的一个成员user_data可由用户挂接一些数据信息到线程控制块中,以提供类似线程私有数据的实现,例如lwIP线程中用于放置定时器链表的表头。
三、线程控制状态
线程运行的过程中,一个时间内只允许一个线程在处理器中运行,从运行的过程上划分,线程有多种不同的运行状态,如运行态,非运行态等。在RT-Thread实时操作系统中,线程包含五种状态,操作系统会自动根据它运行的情况而动态调整它的状态。 RT-Thread中的五种线程状态如下所示:
|
状态
|
描述
|
|
RT_THREAD_INIT
|
线程初始状态。当线程刚开始创建还没开始运行时就处于这个状态;在这个状态下,线程不参与调度
|
|
RT_THREAD_SUSPEND
|
挂起态、阻塞态。线程此时被挂起:它可能因为资源不可用而挂起等待;或线程主动延时一段时间而被挂起。在这个状态下 ,线程不参与调度
|
|
RT_THREAD_READY
|
就绪态。线程正在运行;或当前线程运行完让出处理器后,操作系统寻找最高优先级的就绪态线程运行
|
|
RT_THREAD_RUNNING
|
运行态。线程当前正在运行,在单核系统中,只有rt_thread_self()函数返回的线程处于这个状态;在多核系统中则不受这个限制。
|
|
RT_THREAD_CLOSE
|
线程结束态。当线程运行结束时将处于这个状态。这个状态的线程不参与线程的调度。
|
RT-Thread实时操作系统提供一系列的操作系统调用接口,使得线程的状态在这五个状态之间来回的变换。例如一个就绪态的线程由于申请一个资源(例如使用rt_sem_take),而可能进入挂起态。又例如因为一个外部中断发生了,系统转入中断服务例程,在中断服务例程中释放了相应的资源,导致把等待在这个资源上的高优先级线程唤醒,改变其状态为就绪态,导致当前运行线程切换等等。
几种状态间的转换关系如线程转换图 所示:
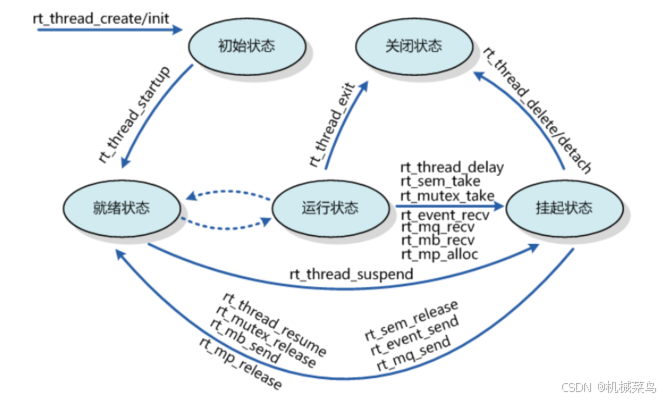
线程通过调用函数rt_thread_create/init进入到初始状态(RT_THREAD_INIT);再通过调用函数rt_thread_startup进入到就绪状态(RT_THREAD_READY);当处于运行状态的线程调用rt_thread_delay,rt_sem_take,rt_mb_recv等函数或由于获取不到资源时,将进入到挂起状态(RT_THREAD_SUSPEND);处于挂起状态的线程,如果等待超时依然未能获得资源或由于其他线程释放了资源,那么它将返回到就绪状态。挂起状态的线程,如果调用rt_thread_delete/detach将更改为关闭状态(RT_THREAD_CLOSE);而运行状态的线程,如果运行结束会在线程最后部分执行rt_thread_exit函数而更改为关闭状态(RT_THREAD_CLOSE)。
四、空闲线程
空闲线程是系统线程中一个比较特殊的线程,它具有最低的优先级,当系统中无其他线程可运行时,调度器将调度到空闲线程。空闲线程通常是一个死循环,永远不被挂起。RT-Thread实时操作系统为空闲线程提供了钩子函数(钩子函数:用户提供的一段代码,在系统运行的某一路径上设置一个钩子,当系统经过这个位置时,转而执行这个钩子函数,然后再返回到它的正常路径上),可以让系统在空闲的时候执行一些特定的任务,例如系统运行指示灯闪烁,电源管理等。除了调用钩子函数,RT-Thread也把线程清理(rt_thread->cleanup回调函数)函数、真正的线程删除动作放到了空闲线程中(在删除线程时,仅改变线程的状态为关闭状态不再参与系统调度)。
本文供各位初学者稍微了解一点知识,感谢各位的观看!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









