









Pytorch工具箱
加载数据
Dataset
提供一种方式去获取数据及其label
如何获取每一个数据及其label?
告诉我们总共有多少个数据?
from torch.utils.data import Dataset
from PIL import Image
import os
class Mydataset(Dataset):
#init中可以存储一个img_path图片名称的数组,则可以在getitem中使用这个打开图片
def __init__(self,root_dir,label_dir):
self.root_dir = root_dir
self.label_dir = label_dir
self.path = os.path.join(self.root_dir,self.label_dir)
self.img_path = os.listdir(self.path)
def __getitem__(self,idx):
img_name = self.img_path[idx]
img_item_path = os.path.join(self.root_dir,self.label_dir,img_name)
img = Image.open(img_item_path)
label = self.label_dir
return img,label
def __len__(self):
return len(self.img_path)
root_dir = 'E:\\ml\\hymenoptera_data\\train'
ants_dir = 'ants'
bees_dir = 'bees'
ants_dataset = Mydataset(root_dir,ants_dir)
bees_dataset = Mydataset(root_dir,bees_dir)
img,label = bees_dataset[1]
TensorBoard
from tensorboardX import SummaryWriter
writter = SummaryWriter("../logs")
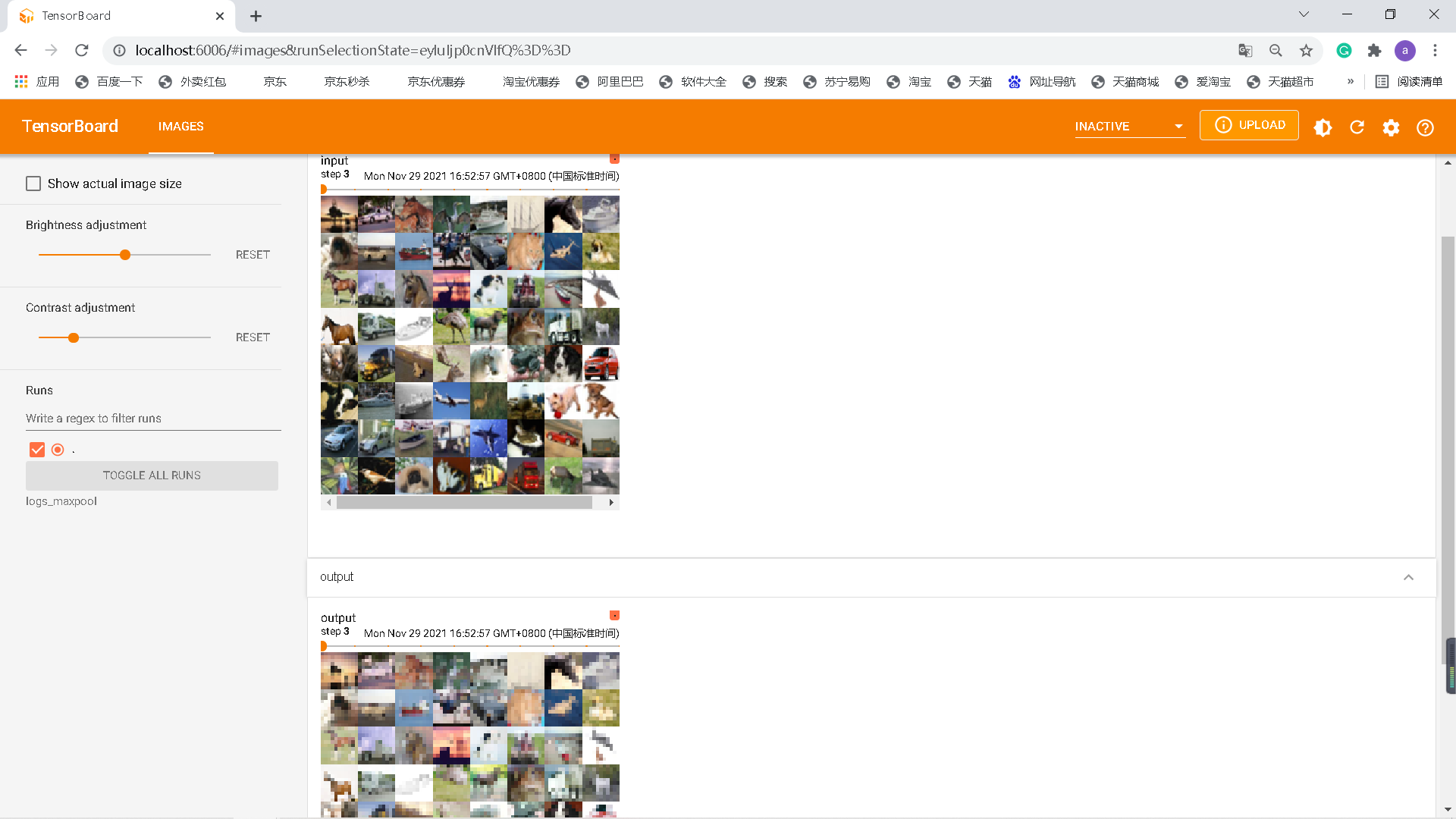
writter.add_images("input",imgs,step)
writter.add_images("output",output,step)
##打开:
tensorboard --logdir=logs
图像变换,transform的转变:
ToTensor 把一些数据转化为tensor的数据类型
import torchvision.transforms as transforms
from PIL import Image
#transforms如何使用
#tensor数据类型
img_path = 'E:\\ml\\hymenoptera_data\\train\\ants\\0013035.jpg'
img = Image.open(img_path)
print(img)
#创建具体的工具,result = tool(input)
tensor_trans = transforms.ToTensor()
tensor_img = tensor_trans(img)
print(tensor_img)
Normalize
#有两个参数,'mean' and 'std'
trans_norm = transforms.Normalize([0.5,0.5,0.5],[0.5,0.5,0.5])
img_norm = trans_norm(tensor_img)
print(img_norm)
Resize
trans_resize = transforms.Resize((128,128))
#img PIL -> resize -> Normalize -> img_resize
img_resize = trans_resize(img_norm)
print(img_resize)
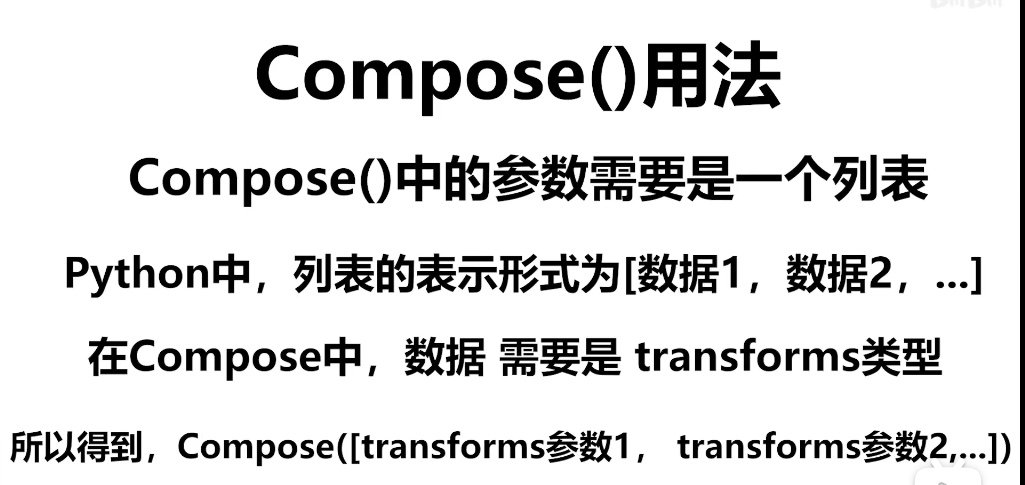
Compose
Dataloader
dataloader = DataLoader(dataset,batch_size = 64)
for data in dataloader:
imgs,targets = data
为后面的网络提供不同的数据形式
神经网络nn.module
channel的理解
- 对于最初输入图片样本的通道数
in_channels取决于图片的类型,如果是彩色的,即RGB类型,这时候通道数固定为3,如果是灰色的,通道数为1。 - 卷积完成之后,输出的通道数
out_channels取决于过滤器的数量。从这个方向理解,这里的out_channels设置的就是过滤器的数目。 - 对于第二层或者更多层的卷积,此时的
in_channels就是上一层的out_channels,out_channels还是取决于过滤器数目。
在第2条我用的是过滤器,而不是卷积核,跟原作者观点有些不同,因为我认为在这里用过滤器描述更合适。卷积核和过滤器的区别可以看我的这篇文章 卷积核(kernel)和过滤器(filter)的区别
对于第1点可以参考下图:
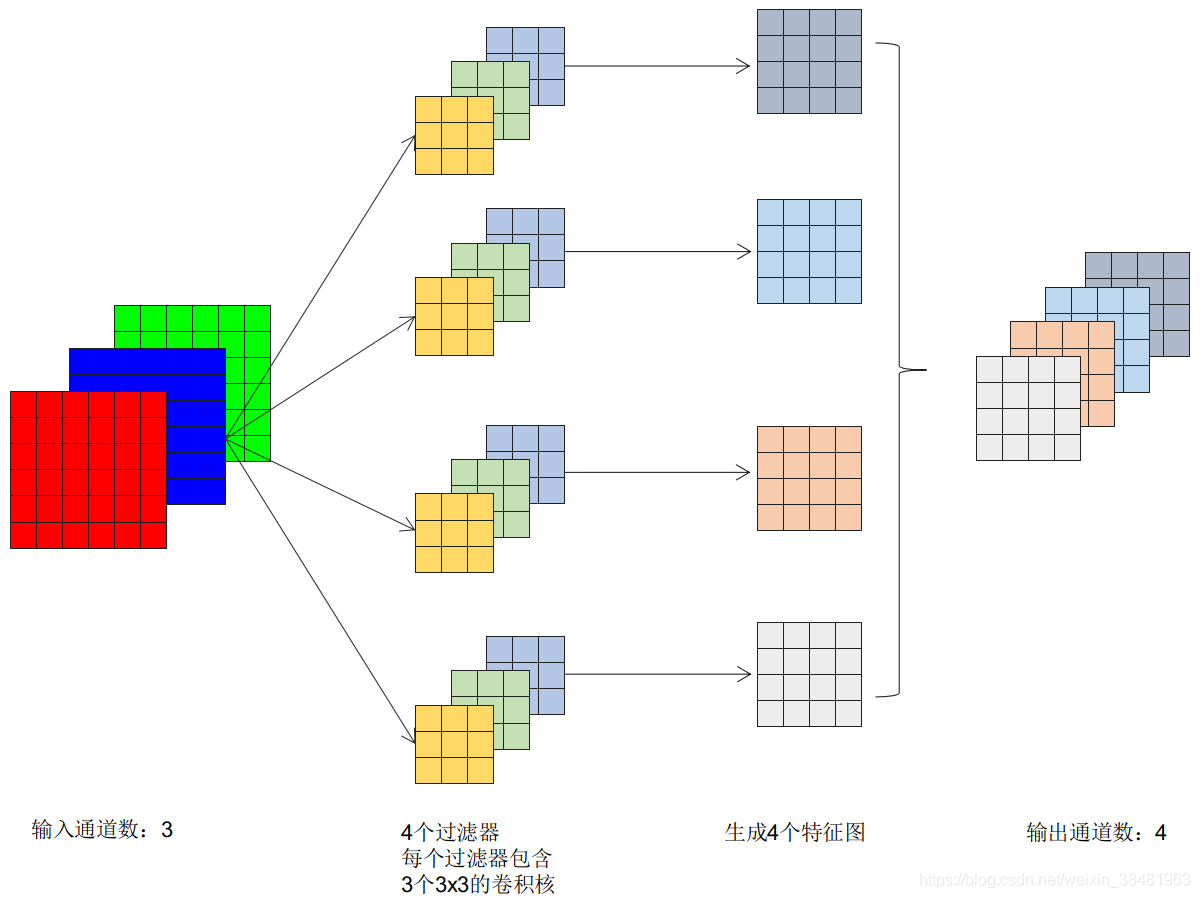
这里输入通道数是3,每个通道都需要跟一个卷积核做卷积运算,然后将结果相加得到一个特征图的输出,这里有4个过滤器,因此得到4个特征图的输出,输出通道数为4。
class Myren(nn.Module):
def __init__(self):
super().__init__()
def forward(self,input):
output = input + 1
return output
myren = Myren()
x = torch.tensor(1.0)
output = myren(x)
print(output)
############################
#我们定义了一个自己的神经网络Myren,其的forward方法提供了+1的传递方式
tensor(2.)
Conv2d
相关参数
- in_channels (int) – Number of channels in the input image
- out_channels (int) – Number of channels produced by the convolution
- kernel_size (int or tuple) – Size of the convolving kernel
- stride (int or tuple, optional) – Stride of the convolution. Default: 1
- padding (int, tuple or str, optional) – Padding added to all four sides of the input. Default: 0
- padding_mode (string*,* optional) –
'zeros','reflect','replicate'or'circular'. Default:'zeros' - dilation (int or tuple, optional) – Spacing between kernel elements. Default: 1
- groups (int, optional) – Number of blocked connections from input channels to output channels. Default: 1
- bias (bool, optional) – If
True, adds a learnable bias to the output. Default:True
x = torch.randn(1,1,28,28)
'''
输入:[ batch_size, channels, height_1, width_1 ]
batch_size,一个batch中样本的个数 1
channels,通道数,也就是当前层的深度 1 一层就是黑白图像
height_1, 图片的高 28
width_1, 图片的宽 28
'''
conv = torch.nn.Conv2d(1,25,(3,3),1)
'''
in_channel,通道数,和上面保持一致,也就是当前层的深度 1
out_channel ,输出的深度 25【需要25个filter】 25个卷积核
height_2,卷积核的高 3
width_2,卷积核的宽 3
stride, 卷积的距离是1
'''
ans = conv(x)
print(len(ans))
print(len(ans[0]))
print(len(ans[0][0]))
print(len(ans[0][0][0]))
###################################
1
25
26
26
测试
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
dataset = torchvision.datasets.CIFAR10('../data',train = False,transform = torchvision.transforms.ToTensor(),download = True)
dataloader = DataLoader(dataset,batch_size = 64)
class Myren(nn.Module):
def __init__(self):
super(Myren,self).__init__()
#彩色图像是3层,6个kernel,3X3,1偏移,0,裁剪
self.conv1 = Conv2d(3,6,3,1,0)
def forward(self,x):
x = self.conv1(x)
return x
myren = Myren()
print(myren)
step = 0
writter = SummaryWriter("../logs")
for data in dataloader:
imgs,targets = data
output = myren.forward(imgs)
print(imgs.shape)
print(output.shape)
#torch.Size([64, 3, 32, 32])
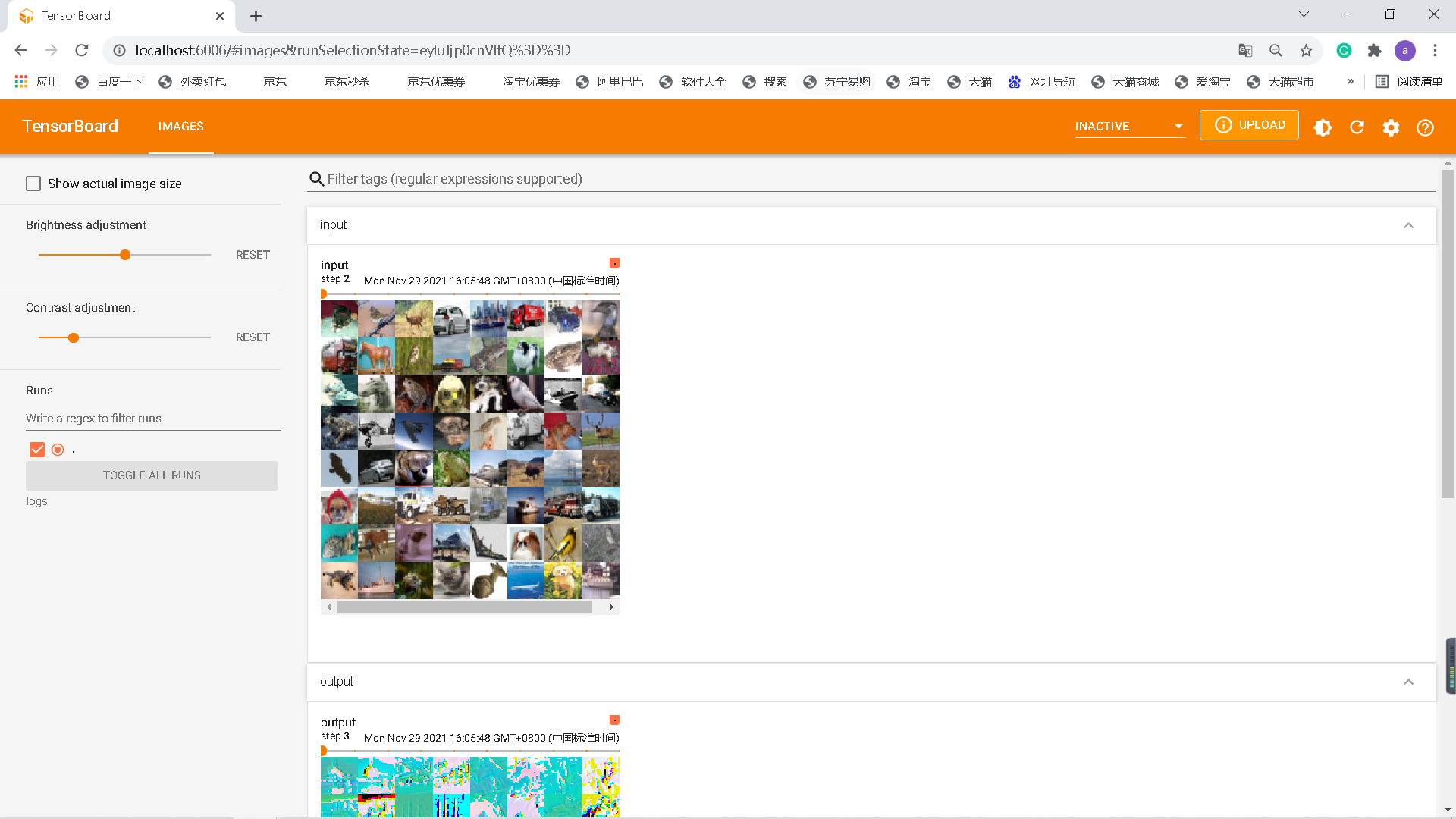
writter.add_images("input",imgs,step)
#torch.Size([64, 6, 30, 30]) -> [xxx,3,30,30]
output = torch.reshape(output,(-1,3,30,30))
writter.add_images("output",output,step)
step = step + 1
##使用tensorboard --logdir=logs打开
Max Pooling
相关参数
- kernel_size – the size of the window to take a max over 池子的大小
- stride – the stride of the window. Default value is
kernel_size - padding – implicit zero padding to be added on both sides
- dilation – a parameter that controls the stride of elements in the window
- return_indices – if
True, will return the max indices along with the outputs. Useful fortorch.nn.MaxUnpool2dlater - ceil_mode – when True, will use ceil instead of floor to compute the output shape 超界的时候是否算上
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
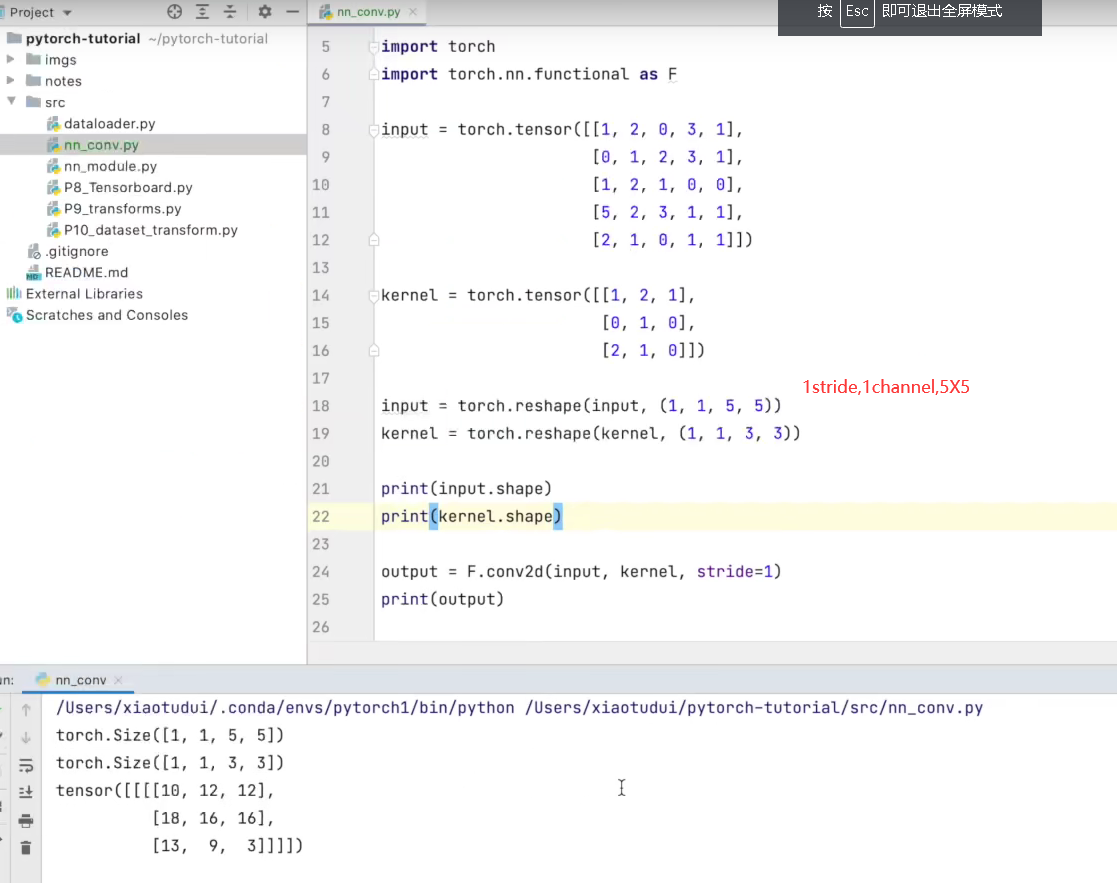
input = torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]],dtype = torch.float32)
input = torch.reshape(input,(-1,1,5,5))
print(input.shape)
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.maxpool1 = MaxPool2d(kernel_size = 3,ceil_mode = True)
def forward(self,x):
output = self.maxpool1(x)
return output
myren = Myren()
output = myren(input)
print(output)
测试
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
dataset = torchvision.datasets.CIFAR10('../data',train = False,
transform = torchvision.transforms.ToTensor(),download = True)
dataloader = DataLoader(dataset,batch_size = 64)
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.maxpool1 = MaxPool2d(kernel_size = 3,ceil_mode = True)
def forward(self,x):
output = self.maxpool1(x)
return output
myren = Myren()
writer = SummaryWriter('../logs_maxpool')
step = 0
for data in dataloader:
imgs,targets = data
output = myren(imgs)
#三维图像池化后也是三维的,不影响,不需要reshape
writer.add_images('input',imgs,step)
writer.add_images('output',output,step)
step = step + 1
非线性激活
Relu
ReLU(input,inplace = True)
inplace : True 的话,是否对原来变量进行一个替换
若input = -1
Relu(input,inplace = True)
input = 0
output = Relu(input,inplace = False)
output = 0 , 原数据不变
from torch.nn import ReLU
from torch import nn
import torch
input = torch.tensor([[1,-0.5],
[-1,3]])
input = torch.reshape(input,(-1,1,2,2))
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.relu1 = ReLU()
def forward(self,input):
output = self.relu1(input)
return output
myren = Myren()
print(myren(input))
print(input)
###########################
tensor([[[[1., 0.],
[0., 3.]]]])
tensor([[[[ 1.0000, -0.5000],
[-1.0000, 3.0000]]]])
sigmoid
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.nn import ReLU
from torch.nn import Sigmoid
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
dataset = torchvision.datasets.CIFAR10('../data',train = False,download = True,
transform = torchvision.transforms.ToTensor())
dataloader = DataLoader(dataset,batch_size = 64)
writer = SummaryWriter('../logs_relu')
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.relu1 = ReLU()
self.sigmoid1 = Sigmoid()
def forward(self,input):
output = self.sigmoid1(input)
return output
myren = Myren()
step = 0
for data in dataloader:
imgs,target = data
writer.add_images("input",imgs,step)
output = myren(imgs)
writer.add_images('output',output,step)
step =step + 1
线性层
Linner
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.nn import ReLU
from torch.nn import Sigmoid
from torch.nn import Linear
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
dataset = torchvision.datasets.CIFAR10('../data',train = False,download = True,
transform = torchvision.transforms.ToTensor())
dataloader = DataLoader(dataset,batch_size = 64)
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = Linear(196608,10)
def forward(self,input):
output = self.linear1(input)
return output
myren = Myren()
for data in dataloader:
imgs,targets = data
print(imgs.shape)
output = torch.reshape(imgs,(1,1,1,-1))
torch.flatten()
print(output.shape)
output = myren(output)
print(output.shape)
Sequential
在Sequential中定义一系列模型
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(3,32,(5,5),padding = 2)
self.maxpool1 = nn.MaxPool2d(kernel_size = 2)
self.conv2 = nn.Conv2d(32,32,(5,5),padding = 2)
self.maxpool2 = nn.MaxPool2d(kernel_size = 2)
self.conv3 = nn.Conv2d(32,64,(5,5),padding = 2)
self.maxpool3 = nn.MaxPool2d(kernel_size = 2)
self.flatten = nn.Flatten()
self.linear1 = nn.Linear(1024,64)
#最后分为10个类别
self.linear2 = nn.Linear(64,10)
def forward(self,input):
input = self.conv1(input)
input = self.maxpool1(input)
input = self.conv2(input)
input = self.maxpool2(input)
input = self.conv3(input)
input = self.maxpool3(input)
input = self.flatten(input)
input = self.linear1(input)
output = self.linear2(input)
return output
myren = Myren()
input = torch.ones((64,3,32,32))
output = myren(input)
print(output.shape)
######################################
torch.Size([64, 10])
使用Sequential
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Conv2d(32,32,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Conv2d(32,64,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Flatten(),
nn.Linear(1024,64),
nn.Linear(1024,10))
def forward(self,input):
input = self.model1(input)
return output
myren = Myren()
input = torch.ones((64,3,32,32))
output = myren(input)
print(output.shape)
####################################
torch.Size([64, 10])
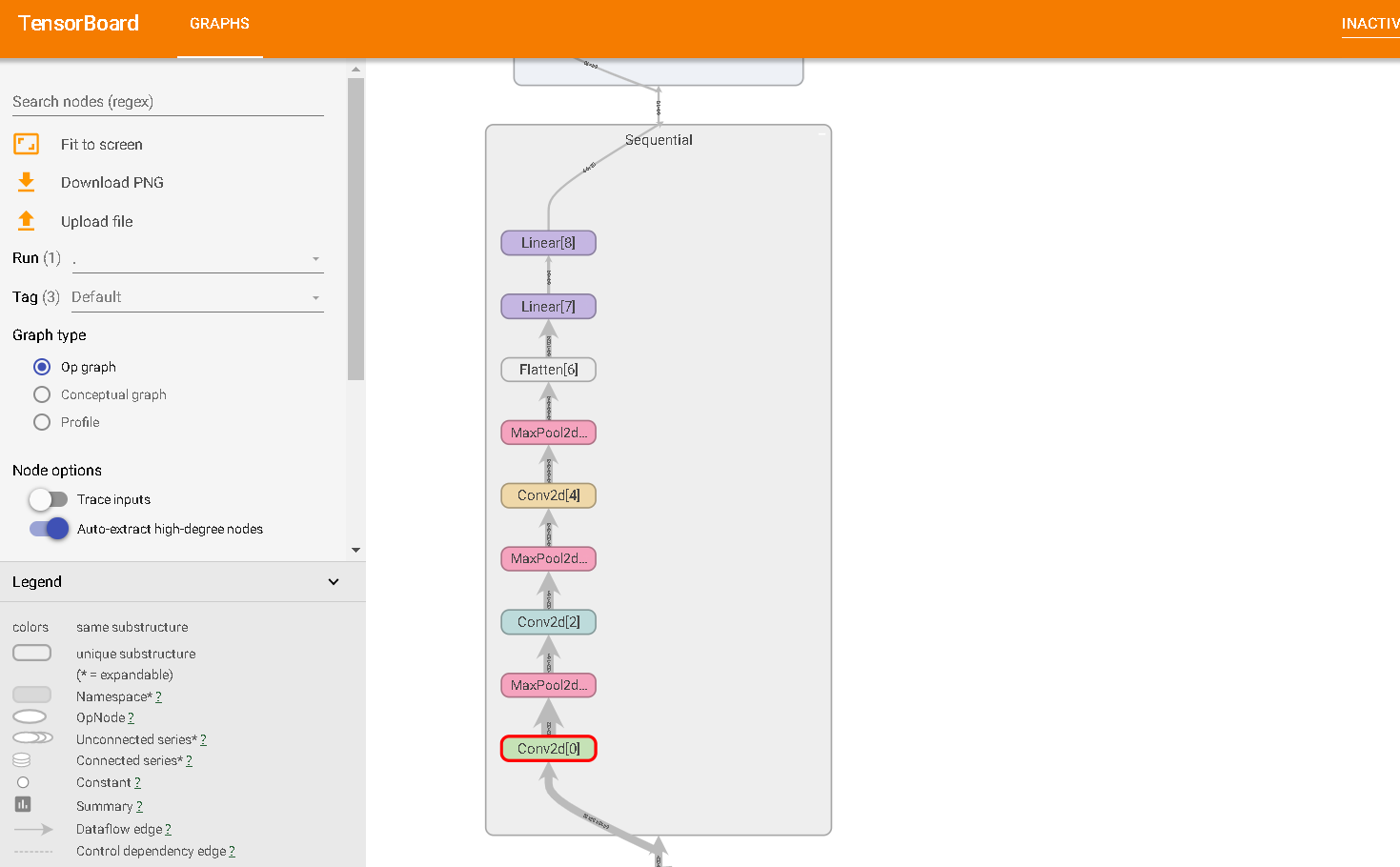
#展示我们的模型
import torchvision
from torch import nn
import torch
from torch.nn import Conv2d
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Conv2d(32,32,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Conv2d(32,64,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Flatten(),
nn.Linear(1024,64),
nn.Linear(64,10))
def forward(self,input):
input = self.model1(input)
return output
myren = Myren()
input = torch.ones((64,3,32,32))
output = myren(input)
print(output.shape)
writer = SummaryWriter("../logs_seq")
writer.add_graph(myren.model1,input)
writer.close()

Loss Function
nn.CrossEntropyLoss()
在其中自动帮你做了softmax并求出了交叉熵
import torch
from torch.nn import L1Loss
import torch.nn as nn
inputs = torch.tensor([1,2,3],dtype = torch.float32)
targets = torch.tensor([1,2,5],dtype = torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))
loss = L1Loss(reduction='sum')#默认是求和后取平均值
result = loss(inputs,targets)
print(result)
x = torch.tensor([0.1,0.2,0.3])
y = torch.tensor([1]) #代表选第二个0.2的
#batchsize : 1
x = torch.reshape(x,(1,3))
loss_cross = nn.CrossEntropyLoss()
result_cross = loss_cross(x,y)
print(result_cross)
#########################
tensor(2.)
tensor(1.1019)
优化器Optim
torch.optim.SGD随机梯度下降
import torchvision
from torch import nn
import torch
import torch.nn as nn
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
dataset = torchvision.datasets.CIFAR10('../data',train = False,
transform = torchvision.transforms.ToTensor(),download = True)
dataloader = DataLoader(dataset,batch_size = 64)
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.mode = nn.Sequential(
nn.Conv2d(3,32,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Conv2d(32,32,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Conv2d(32,64,(5,5),padding = 2),
nn.MaxPool2d(kernel_size = 2),
nn.Flatten(),
nn.Linear(1024,64),
nn.Linear(64,10))
def forward(self,input):
output = self.mode(input)
return output
loss = nn.CrossEntropyLoss()
myren = Myren()
#随机梯度下降
optim = torch.optim.SGD(myren.parameters(),lr=0.01)
for epoch in range(20):
running_loss = 0.0
for data in dataloader:
imgs,targets = data
outputs = myren(imgs)
result_loss = loss(outputs,targets)
optim.zero_grad()
#反向传播
result_loss.backward()
optim.step()
running_loss = running_loss + result_loss
print(running_loss)
模型使用修改
模型添加:model.add_module(‘name’, nn.Linear())
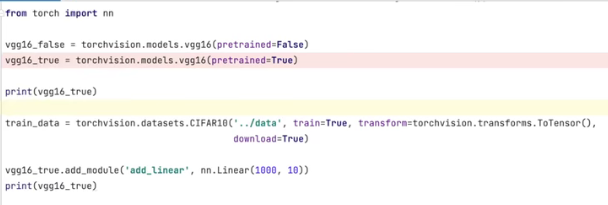
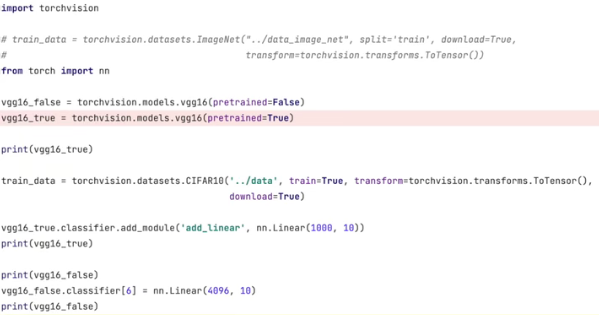
模型修改:model.classifier[x] = nn.xxx()
模型保存加载
保存和加载
import torch
import torchvision
vgg16 = torchvision.models.vgg16(pretrained = False)
#保存方式1,保存了模型结构也保存了参数
torch.save(vgg16,"vgg16_metod1.pth")
#保存方式2,保存参数
torch.save(vgg16.state_dict(),"vgg16_metod2.pth")
import torch
import torchvision
#加载模型1
model = torch.load("vgg16_metod1.pth")
print(model)
#加载模型2
vgg16 = torchvision.models.vgg16(pretrained = False)
vgg16.load_state_dict(torch.load("vgg16_metod2.pth"))
print(vgg16)
完整模型训练
import torchvision
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from tensorboardX import SummaryWriter
#准备数据集
train_data = torchvision.datasets.CIFAR10(root = "../data",train = True,
transform = torchvision.transforms.ToTensor(),
download = True)
test_data = torchvision.datasets.CIFAR10(root = "../data",train = False,
transform = torchvision.transforms.ToTensor(),
download = True)
train_data_size = len(train_data)
test_data_size = len(test_data)
print(train_data_size)
print(test_data_size)
#加载数据集
train_dataloader = DataLoader(train_data,batch_size = 64)
test_dataloader = DataLoader(test_data,batch_size = 64)
#搭建神经网络
class Myren(nn.Module):
def __init__(self):
super().__init__()
self.model = nn.Sequential(
nn.Conv2d(3,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(1024,64),
nn.Linear(64,10)
)
def forward(self,x):
x = self.model(x)
return x
myren = Myren()
#损失函数
loss_fn = nn.CrossEntropyLoss()
#优化器
optimizer = torch.optim.SGD(myren.parameters(),lr = 0.01)
#训练次数和步数
total_train_step = 0
total_test_step = 0
epoch = 10
#添加tensorboard
writer = SummaryWriter("../logs_train")
for i in range(epoch):
print("--------训练轮数:{}--------".format(i+1))
for data in train_dataloader:
imgs,targets = data
outputs = myren(imgs)
loss = loss_fn(outputs,targets)
#优化器优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_train_step += 1
if(total_train_step%100 == 0):
print("训练次数:{},loss:{}".format(total_train_step,loss.item()))
writer.add_scalar("train_loss",loss.item(),total_train_step)
#测试
total_test_loss = 0
total_test_step += 1
total_accuracy = 0
with torch.no_grad():
for data in test_dataloader:
imgs,targets = data
outputs = myren(imgs)
loss = loss_fn(outputs,targets)
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
total_test_loss = total_test_loss + loss
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_accuracy",total_accuracy/total_test_step,total_test_step)
writer.add_scalar("test_loss",total_test_loss,total_test_step)
writer.close()















 252
252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









