








算法思想

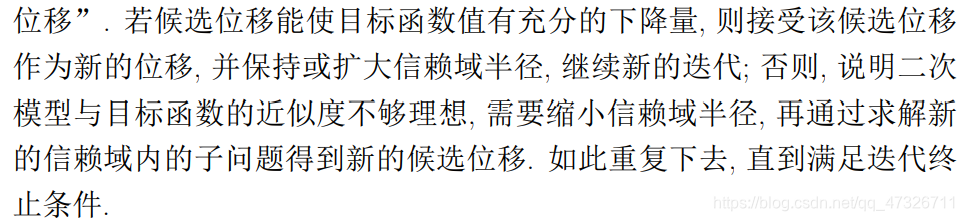

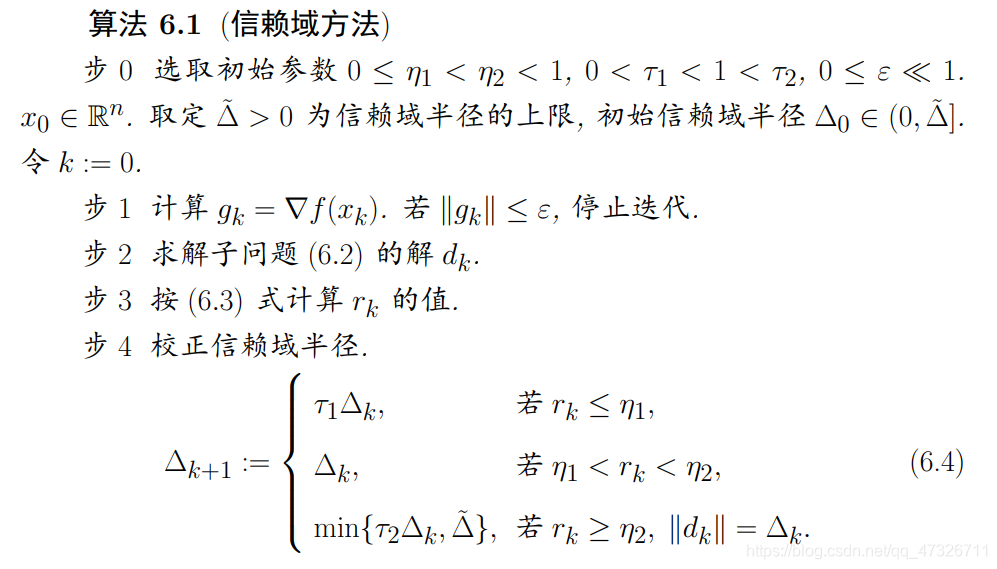
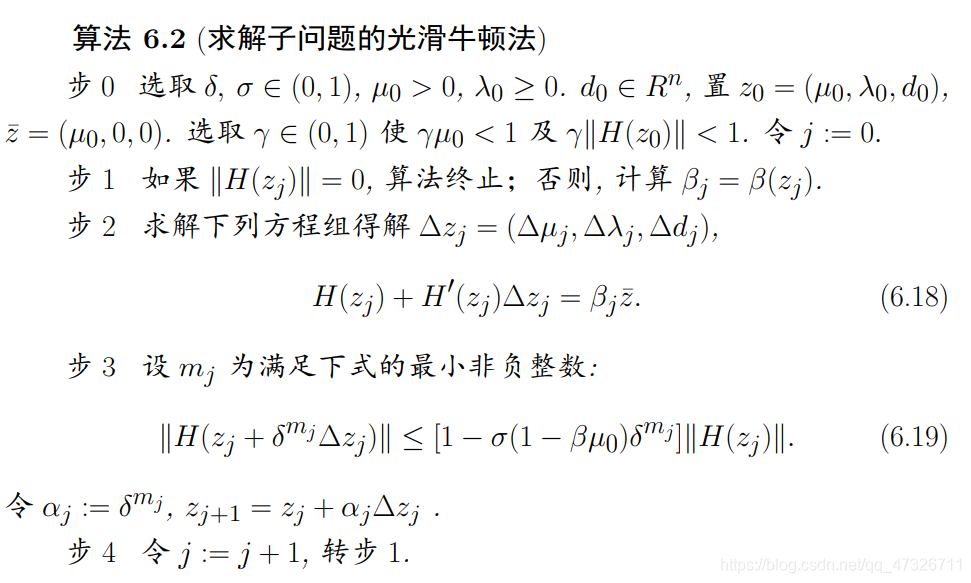
算法步骤

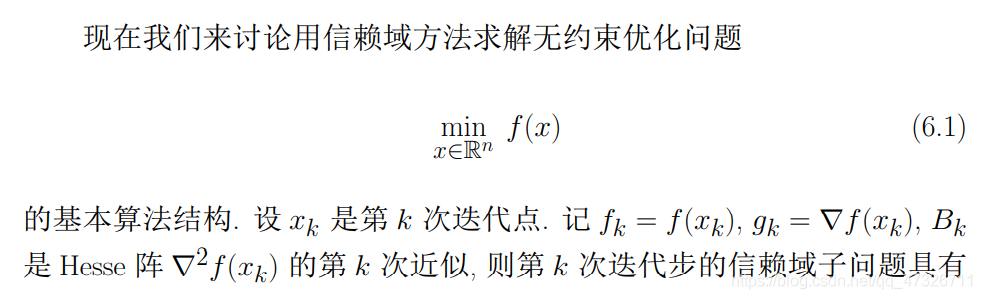
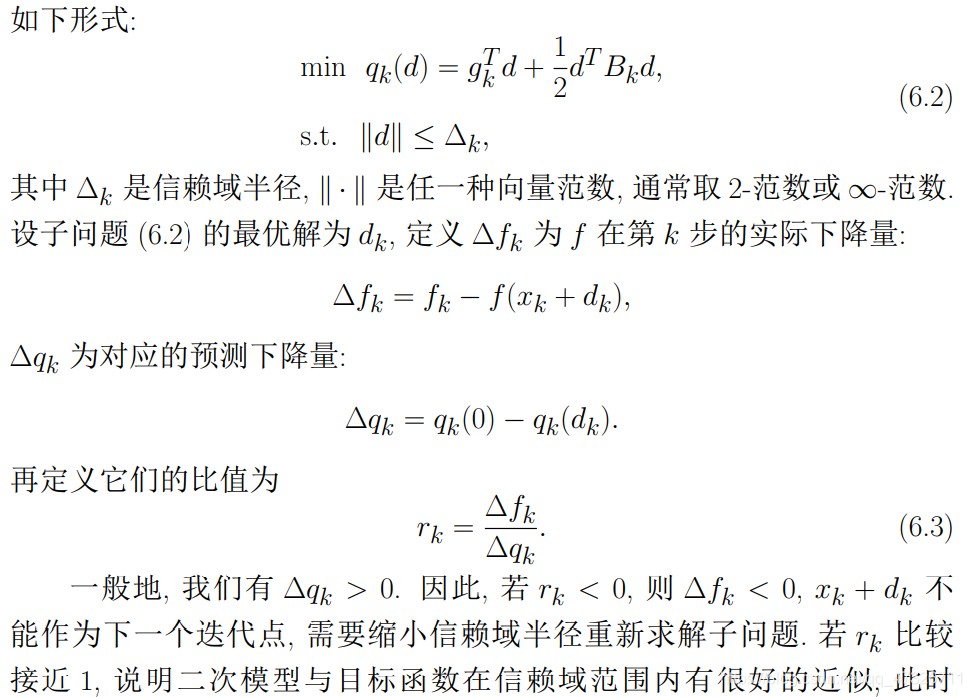
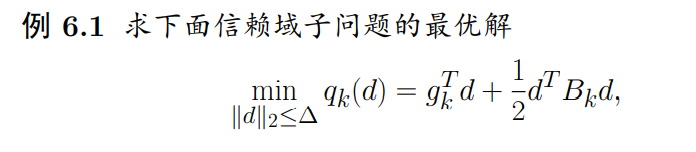
子问题
算法步骤
代码
function [d,val,lam,k]=trustq(gk,Bk,dta)
% 功能: 求解信赖域子问题: min qk(d)=gk'*d+0.5*d'*Bk*d, s.t. ||d||<=delta
%输入: gk是xk处的梯度, Bk是第k次近似Hesse阵, dta是当前信赖域半径
%输出: d, val分别是子问题的最优点和最优值, lam是乘子值, k是迭代次数.
n=length(gk); gamma=0.05;
epsilon=1.0e-6; rho=0.6; sigma=0.2;
mu0=0.05; lam0=0.05;
d0=ones(n,1); z0=[mu0,lam0,d0']';
u0=[mu0,zeros(1,n+1)]';
k=0; %k为迭代次数
z=z0;
mu=mu0; lam=lam0; d=d0;
while ( k<=150) %Step1 of the algorithm
dh=dah(mu,lam,d,gk,Bk,dta);
if(norm(dh)<epsilon)
break;
end
A=JacobiH(mu,lam,d,Bk,dta); b=beta(mu,lam,d,gk,Bk,dta,gamma)*u0-dh;
B=inv(A); dz=B*b;
dmu=dz(1); dlam=dz(2); dd=dz(3:n+2);
m=0; mk=0;
while (m<20)
dhnew=dah(mu+rho^m*dmu,lam+rho^m*dlam,d+rho^m*dd,gk,Bk,dta);
if(norm(dhnew)<=(1-sigma*(1-gamma*mu0)*rho^m)*dh)
mk=m;
break;
end
m=m+1;
end
alpha=rho^mk;
mu=mu+alpha*dmu;
lam=lam+alpha*dlam;
d=d+alpha*dd;
k=k+1;
end
val=gk'*d+0.5*d'*Bk*d;
%%%%%%%%%%%%%%%%%%%%%%%%%%
function p=phi(mu,a,b)
p=a+b-sqrt((a-b)^2+4*mu);
%%%%%%%%%%%%%%%%%%%%%%%%%%
function dh=dah(mu,lam,d,gk,Bk,dta)
n=length(d);
dh(1)=mu; dh(2)=phi(mu,lam, dta^2-norm(d)^2);
mh=(Bk+lam*eye(n))*d+gk;
for(i=1:n)
dh(2+i)=mh(i);
end
dh=dh(:);
%%%%%%%%%%%%%%%%%%%%%%%%%%
function bet=beta(mu,lam,d,gk,Bk,dta,gamma)
dh=dah(mu,lam,d,gk,Bk,dta);
bet=gamma*norm(dh)*min(1,norm(dh));
%%%%%%%%%%%%%%%%%%%%%%%%%%
function A=JacobiH(mu,lam,d,Bk,dta)
n=length(d);
A=zeros(n+2,n+2);
pmu=-4*mu/sqrt((lam+norm(d)^2-dta^2)^2+4*mu^2);
thetak=(lam+norm(d)^2-dta^2)/sqrt((lam+norm(d)^2-dta^2)^2+4*mu^2);
A=[1,0,zeros(1,n);pmu,1-thetak,-2*(1+thetak)*d';zeros(n,1), d,Bk+lam*eye(n)];
示例
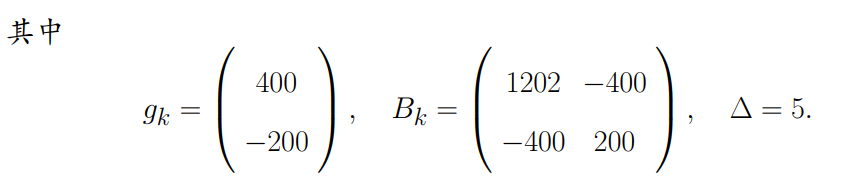
在 Matlab 命令窗口依次输入下列命令
gk=[400 -200]’;
Bk=[1202 -400; -400 200];
dta=5;
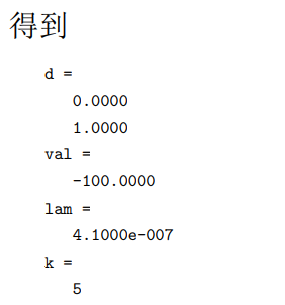
[d,val,lam,k]=trustq(gk,Bk,dta)
原问题代码
Matlab代码如下:
function [xk,val,k]=trustm(x0)
%功能: 牛顿型信赖域方法求解无约束优化问题 min f(x)
%输入: x0是初始迭代点
%输出: xk是近似极小点, val是近似极小值, k是迭代次数
n=length(x0); x=x0; dta=1;
eta1=0.15; eta2=0.75; dtabar=2.0;
tau1=0.5; tau2=2.0; epsilon=1e-6;
k=0; Bk=Hess(x); %Bk=eye(n);
while(k<150)
gk=gfun(x);
if(norm(gk)<epsilon)
break;
end
[d,val,lam,ik]=trustq(gk,Bk,dta);
deltaq=-qk(x,d);
deltaf=fun(x)-fun(x+d);
rk=deltaf/deltaq;
if(rk<=eta1)
dta=tau1*dta;
else if (rk>=eta2&norm(d)==dta)
dta=min(tau2*dta,dtabar);
else
dta=dta;
end
end
if(rk>eta1)
x0=x; x=x+d;
% sk=x-x0; yk=gfun(x)-gfun(x0);
%vk=sqrt(yk'*Bk*yk)*(sk/(sk'*yk)-Bk*yk/(yk'*Bk*yk));
%Bk=Bk-Bk*yk*yk'*Bk/(yk'*Bk*yk)+sk*sk'/(sk'*yk)+vk*vk'
%pause
Bk=Hess(x);
end
k=k+1;
end
xk=x;
val=fun(xk);
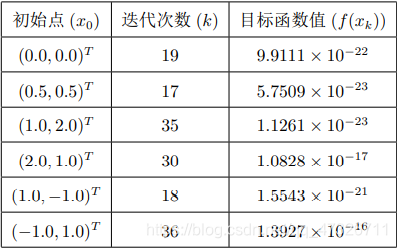
示例
考虑无约束优化问题
m
i
n
f
(
x
)
=
100
(
x
1
2
−
x
2
)
2
+
(
x
1
−
1
)
2
minf(x)=100(x_1^2-x_2)^2+(x_1-1)^2
minf(x)=100(x12−x2)2+(x1−1)2
该问题有精确解x=(1,1)T,
f
(
x
)
=
0
f(x)=0
f(x)=0.
fun函数文件:
%目标函数
function f=fun(x)
f=100*(x(1)^2-x(2))^2+(x(1)-1)^2;
gfun函数文件:
%梯度
function gf=gfun(x)
gf=[400*x(1)*(x(1)^2-x(2))+2*(x(1)-1), -200*(x(1)^2-x(2))]’;
目标函数的Hesse阵:
function He=Hess(x)
n=length(x);
He=zeros(n,n);
He=[1200*x(1)^2-400*x(2)+2, -400*x(1);-400*x(1),200];
子问题目标函数:
function qd=qk(x,d)
gk=gfun(x); Bk=Hess(x);
qd=gk'*d+0.5*d'*Bk*d;
交互界面输入:
x0=[-1,1]’;
[x,val,k]=[xk,val,k]=trustm(x0)
结果:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









