







主要内容:
1、非阻塞IO(补充:有限状态机编程)
2、IO多路转接(IO多路复用)
3、其他读写函数
4、存储映射IO
5、文件锁
1、非阻塞IO
我们之前写的程序都是阻塞IO,但是在有些情况下,阻塞IO就显得没那么优秀。比如我们来看下一个简单的数据中继:
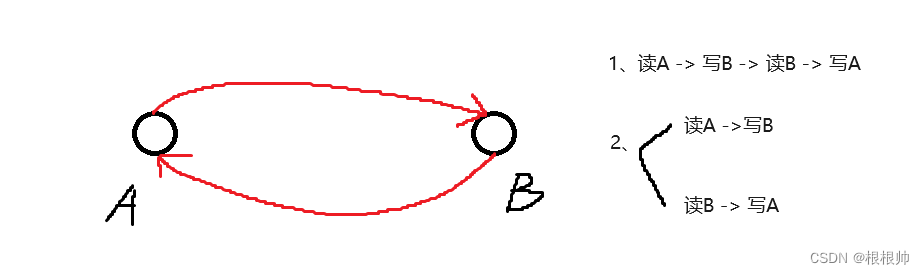
如果是阻塞IO,并且是一个任务(一个进程或者线程)去用上图1来进行,那么要是A数据空了,而B数据溢出,就会阻塞,后面的也无法进行。
而如果是分为两个任务,则可以用上图2,一个负责读A写B,一个负责读B写A。
或者,使用非阻塞IO,用一个任务也可以让上图1不会卡住,因为如果读A不行就转去读B就是,也可以正常推进。
有限状态机编程:
有限状态机编程可以用于解决复杂流程问题。
简单流程:一个程序的自然流程是结构化的。
复杂流程:一个程序的自然流程不是结构化的。
自然流程:作为一个人类的思维,解决一个问题最直观的思路,比如把一个大象放进冰箱的步骤。
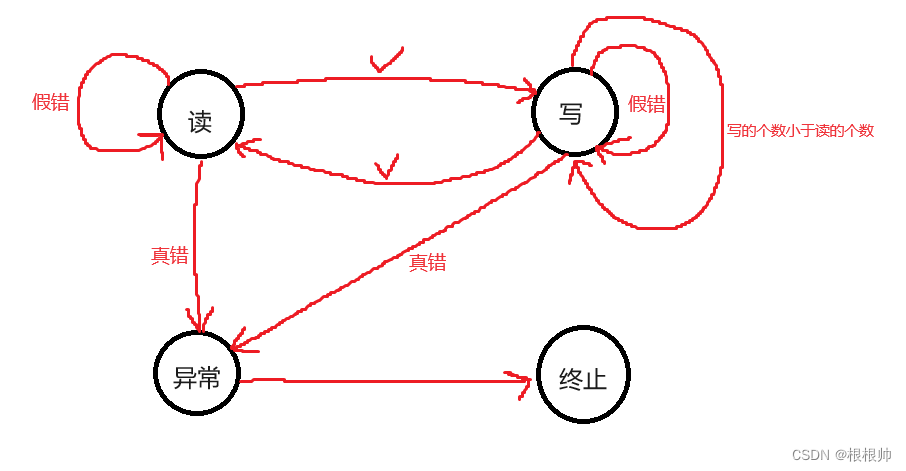
这样说可能不是很好理解,我们用有限状态机编程来实现一下中继就好理解了。
说到底,其实这个读写不就是我们在第一章节IO里实现的mycpy吗,我们再次把这个程序来进行一下重构:
先来看看有限状态机在这里面的编程思路:
实现:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#define TTY1 "/dev/tty11"
#define TTY2 "/dev/tty12"
#define BUFSIZE 1024
// 状态
enum
{
STATE_R = 1,
STATE_W,
STATE_Ex,
STATE_T
};
// 状态机
struct fsm_st
{
int state; // 状态
int sfd; // 源
int dfd; // 目标
char buf[BUFSIZE]; // 读写缓冲
int pos; // 文件读取位置
int len; // 读到的数量
char *msg; // 信息
};
// 状态机推动
static void fsm_driver(struct fsm_st *fsm)
{
int writelen;
switch (fsm->state)
{
case STATE_R:
fsm->len = read(fsm->sfd, fsm->buf, BUFSIZE);
if (fsm->len < 0) // 出错,判断假错还是真错
{
if (errno == EAGAIN) // 假错:暂时没内容读到,那就继续读
{
fsm->state = STATE_R;
}
else // 真错,变为异常态
{
fsm->msg = "read()";
fsm->state = STATE_Ex;
}
}
else if (fsm->len == 0) // 读完,变为终止态
{
fsm->state = STATE_T;
}
else // 变为写态
{
fsm->pos = 0; // 位置清零
fsm->state = STATE_W;
}
break;
case STATE_W:
writelen = write(fsm->dfd, fsm->buf + fsm->pos, fsm->len);
// 写够没有(读的个数是否等于写的个数)
if (writelen < 0) // 出错,看真错还是假错
{
if (errno == EAGAIN) // 假错,继续写
{
fsm->state = STATE_W;
}
else // 真错,去异常态
{
fsm->msg = "write()";
fsm->state = STATE_Ex;
}
}
else
{
fsm->pos += writelen; // 记录当前写到的位置,要是没写够,下次从当前位置接着写
fsm->len -= writelen;
if (fsm->len == 0) // 读多少就成功的写了多少,那就回到读态继续
{
fsm->state = STATE_R;
}
else // 写的个数小于读的个数,从当前位置继续去写
{
fsm->state = STATE_W;
}
}
break;
case STATE_Ex:
// 异常态就报报错就可以前往终止态了
perror(fsm->msg);
fsm->state = STATE_T;
break;
case STATE_T:
/*do sth*/
break;
default:
/*do sth*/
break;
}
}
static void relay(int fd1, int fd2)
{
int fd1_save, fd2_save;
struct fsm_st fsmab, fsmba;
// 首先把两个文件加上非阻塞性质
fd1_save = fcntl(fd1, F_GETFL);
fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
fd2_save = fcntl(fd2, F_GETFL);
fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
// 状态机赋值
fsmab.state = STATE_R;
fsmab.sfd = fd1;
fsmab.dfd = fd2;
fsmba.state = STATE_R;
fsmba.sfd = fd2;
fsmba.dfd = fd1;
// 开始推动状态机运行
while (fsmab.state != STATE_T || fsmba.state != STATE_T)
{
fsm_driver(&fsmab);
fsm_driver(&fsmba);
}
// 注意,退出这个模块的时候,应该把状态恢复到进入这个模块之前的状态
fcntl(fd1, F_SETFL, fd1_save);
fcntl(fd2, F_SETFL, fd2_save);
}
int main()
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR);
if (fd1 < 0)
{
perror("open()");
exit(1);
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK);
if (fd2 < 0)
{
perror("open()");
exit(1);
}
// 中继
relay(fd1, fd2);
close(fd2);
close(fd1);
exit(0);
}现在使用tty11(ctrl+alt+f11)和tty12(ctrl+alt+f12)就可以互相发送接收消息了。
下面我们自己封装一个,用于多对任务的推进,比如两对任务同时读写,或者三对。。。
relayer.h
#ifndef RELAYER_H__
#define RELAYER_H__
#define JOBMAX 10000
// 任务的状态
enum
{
STATE_RUNNING = 1,
STATE_CANCELED,
STATE_OVER
};
/**
*添加任务
return >= 0 成功,返回当前任务ID
== -EINVAL 失败,参数非法
== -ENOSPC 失败,任务数组满
== -ENOMEM 失败,内存分派有误
*/
int rel_addjob(int fd1, int fd2);
/**
* 卸载任务我就不实现了,大家可以自己实现module_unload
* 回收资源等等
*/
#endifrelayer.c
#include <stdio.h>
#include <stdlib.h>
#include <errno.h>
#include <pthread.h>
#include <fcntl.h>
#include <string.h>
#include <unistd.h>
#include "relayer.h"
#define BUFSIZE 1024
pthread_mutex_t mut = PTHREAD_MUTEX_INITIALIZER;
pthread_once_t rel_once = PTHREAD_ONCE_INIT;
static struct rel_job_st *job[JOBMAX];
// 状态机的状态
enum
{
STATE_R = 1,
STATE_W,
STATE_Ex,
STATE_T
};
// 状态机
struct rel_fsm_st
{
int state; // 状态
int sfd; // 源
int dfd; // 目标
char buf[BUFSIZE]; // 读写缓冲
int pos; // 文件读取位置
int len; // 读到的数量
char *msg; // 信息
};
// 任务
struct rel_job_st
{
int job_state;
int fd1;
int fd2;
struct rel_fsm_st fsm12, fsm21;
int fd1_save, fd2_save;
// 还可以有些其他,比如任务开始时间等等,大家自行可以拓展
};
// 状态机推动
static void job_fsm_driver(struct rel_fsm_st *fsm)
{
int writelen;
switch (fsm->state)
{
case STATE_R:
fsm->len = read(fsm->sfd, fsm->buf, BUFSIZE);
if (fsm->len < 0) // 出错,判断假错还是真错
{
if (errno == EAGAIN) // 假错:暂时没内容读到,那就继续读
{
fsm->state = STATE_R;
}
else // 真错,变为异常态
{
fsm->msg = "read()";
fsm->state = STATE_Ex;
}
}
else if (fsm->len == 0) // 读完,变为终止态
{
fsm->state = STATE_T;
}
else // 变为写态
{
fsm->pos = 0; // 位置清零
fsm->state = STATE_W;
}
break;
case STATE_W:
writelen = write(fsm->dfd, fsm->buf + fsm->pos, fsm->len);
// 写够没有(读的个数是否等于写的个数)
if (writelen < 0) // 出错,看真错还是假错
{
if (errno == EAGAIN) // 假错,继续写
{
fsm->state = STATE_W;
}
else // 真错,去异常态
{
fsm->msg = "write()";
fsm->state = STATE_Ex;
}
}
else
{
fsm->pos += writelen; // 记录当前写到的位置,要是没写够,下次从当前位置接着写
fsm->len -= writelen;
if (fsm->len == 0) // 读多少就成功的写了多少,那就回到读态继续
{
fsm->state = STATE_R;
}
else // 写的个数小于读的个数,从当前位置继续去写
{
fsm->state = STATE_W;
}
}
break;
case STATE_Ex:
// 异常态就报报错就可以前往终止态了
perror(fsm->msg);
fsm->state = STATE_T;
break;
case STATE_T:
/*do sth*/
break;
default:
/*do sth*/
break;
}
}
// 寻找数组空闲位置
static int get_free_pos()
{
int i;
for (i = 0; i < JOBMAX; ++i)
{
if (job[i] == NULL)
{
return i;
}
}
return -1;
}
static void *rel_func(void *p)
{
int i;
while (1)
{
// 便利job数组的时候要加锁!
pthread_mutex_lock(&mut);
for (i = 0; i < JOBMAX; ++i)
{
if (job[i] != NULL)
{
if (job[i]->job_state == STATE_RUNNING)
{
job_fsm_driver(&job[i]->fsm12);
job_fsm_driver(&job[i]->fsm21);
// 推动后判断状态
// 如果两个都终止了,就把任务状态写成终止态
if (job[i]->fsm12.state == STATE_T && job[i]->fsm21.state == STATE_T)
{
job[i]->job_state = STATE_OVER;
}
}
}
}
pthread_mutex_unlock(&mut);
}
}
static void rel_module_load(void)
{
pthread_t tid;
int err;
err = pthread_create(&tid, NULL, rel_func, NULL);
if (err)
{
fprintf(stderr, "pthread_create():%s\n", strerror(err));
exit(1);
}
}
int rel_addjob(int fd1, int fd2)
{
int pos;
struct rel_job_st *me;
if (fd1 < 0 || fd2 < 0)
{
return -EINVAL;
}
// 开始推动任务
pthread_once(&rel_once, rel_module_load);
me = malloc(sizeof(*me));
if (me == NULL)
{
return -ENOMEM;
}
// 赋值
me->fd1 = fd1;
me->fd2 = fd2;
me->job_state = STATE_RUNNING;
// 把文件变为非阻塞
me->fd1_save = fcntl(me->fd1, F_GETFL);
fcntl(fd1, F_SETFL, me->fd1_save | O_NONBLOCK);
me->fd2_save = fcntl(me->fd2, F_GETFL);
fcntl(fd2, F_SETFL, me->fd2_save | O_NONBLOCK);
// 赋值状态机
me->fsm12.sfd = me->fd1;
me->fsm12.dfd = me->fd2;
me->fsm12.state = STATE_R;
me->fsm21.sfd = me->fd2;
me->fsm21.dfd = me->fd1;
me->fsm21.state = STATE_R;
// 寻找数组空闲位置
// 注意,找位置肯定要加锁哟!
pthread_mutex_lock(&mut);
pos = get_free_pos();
if (pos < 0)
{
// 记住退出之前要解锁!恢复文件之前的属性!free刚刚malloc的me!
pthread_mutex_unlock(&mut);
fcntl(me->fd1, F_SETFL, me->fd1_save);
fcntl(me->fd2, F_SETFL, me->fd2_save);
free(me);
return -ENOSPC;
}
// 找到位置,将任务加入
job[pos] = me;
// 解锁
pthread_mutex_unlock(&mut);
return pos;
}main.c
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#include <string.h>
#include "relayer.h"
#define TTY1 "/dev/tty11"
#define TTY2 "/dev/tty12"
#define TTY3 "/dev/tty10"
#define TTY4 "/dev/tty9"
int main()
{
int job1, job2;
int fd1, fd2, fd3, fd4;
fd1 = open(TTY1, O_RDWR);
if (fd1 < 0)
{
perror("open()");
exit(1);
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK);
if (fd2 < 0)
{
perror("open()");
exit(1);
}
fd3 = open(TTY3, O_RDWR);
if (fd3 < 0)
{
perror("open()");
exit(1);
}
fd4 = open(TTY4, O_RDWR);
if (fd4 < 0)
{
perror("open()");
exit(1);
}
// 添加任务fd1 fd2
job1 = rel_addjob(fd1, fd2);
if (job1 < 0)
{
fprintf(stderr, "rel_addjob():%s\n", strerror(-job1));
exit(1);
}
// 添加任务fd3 fd4
job2 = rel_addjob(fd3, fd4);
if (job2 < 0)
{
fprintf(stderr, "rel_addjob():%s\n", strerror(-job2));
exit(1);
}
// 别让它结束
while (1)
{
pause();
}
// 关闭(虽然执行不到这些)
close(fd2);
close(fd1);
close(fd3);
close(fd4);
exit(0);
}现在使用tty11(ctrl+alt+f11)和tty12(ctrl+alt+f12)可以互相发送接收消息。并且tty9(ctrl+alt+f9)和tty10(ctrl+alt+f10)也可以相互发送接收消息,并且互不干扰。
我们可以发现,不管是上面两个的哪个程序,我们在运行的时候它始终处于一个忙等的状态,cpu占用率拉满,因为加入说没东西,那read()那里返回的就是一个假错,就会一直循环判断。这个时候我们就可以用IO多路转接/IO多路复用。
2、IO多路转接(IO多路复用)
它的作用说白了就是监视文件描述符的行为的。当当前文件描述符发生了我感兴趣的行为的时候,才去做后续操作
主要函数:
select()、poll()、epoll()
#include <sys/select.h>
int select(int nfds, fd_set *readfds, fd_set *writefds, fd_set *exceptfds, struct timeval *timeout);
//nfds:监视的文件描述符的最大的那个再加一
//readfds:所关心的文件描述符中可读的
//writefds:所关心的文件描述符中可写的
//exceptfds:所关心的文件描述符中异常的
//timeout:超时设置,如果不设置,就是忙等,知道感兴趣的事情发送为止,比如readfds中有可以读的文件描述符了,select才返回
//返回值:成功返回的是当前发生了你感兴趣的文件描述符的个数;失败返回-1并设置errno,超时返回假错EINTR
struct timeval {
long tv_sec; /* seconds */
long tv_usec; /* microseconds */
};
//其实这里fd_set集合的操作和我们之前的sigset_t的操作差不多
void FD_CLR(int fd, fd_set *set);//从集合中删除fd
int FD_ISSET(int fd, fd_set *set);//看一个fd是否在集合中
void FD_SET(int fd, fd_set *set);//把fd加入集合
void FD_ZERO(fd_set *set);//清空集合现在我们用select把之前的两个设备互发信息的程序从忙等改变为非忙等,先来看看之前的忙等在哪里:
// 开始推动状态机运行
while (fsmab.state != STATE_T || fsmba.state != STATE_T)
{
fsm_driver(&fsmab);
fsm_driver(&fsmba);
}不停的调用while来推状态机。
现在我们加入select来改写,不盲目地推,直到发生了感兴趣的动作为止。先来搭个框架,看看我们应该是个什么逻辑来写:
// 开始推动状态机运行
while (fsmab.state != STATE_T || fsmba.state != STATE_T)
{
// 布置监视任务
// 监视
select();
// 查看监视结果
if ()
{
fsm_driver(&fsmab);
}
if ()
{
fsm_driver(&fsmba);
}
}好,现在我们来补全程序:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#include <sys/select.h>
#define TTY1 "/dev/tty11"
#define TTY2 "/dev/tty12"
#define BUFSIZE 1024
// 状态
enum
{
STATE_R = 1,
STATE_W,
STATE_Ex,
STATE_T
};
// 状态机
struct fsm_st
{
int state; // 状态
int sfd; // 源
int dfd; // 目标
char buf[BUFSIZE]; // 读写缓冲
int pos; // 文件读取位置
int len; // 读到的数量
char *msg; // 信息
};
// 状态机推动
static void fsm_driver(struct fsm_st *fsm)
{
int writelen;
switch (fsm->state)
{
case STATE_R:
fsm->len = read(fsm->sfd, fsm->buf, BUFSIZE);
if (fsm->len < 0) // 出错,判断假错还是真错
{
if (errno == EAGAIN) // 假错:暂时没内容读到,那就继续读
{
fsm->state = STATE_R;
}
else // 真错,变为异常态
{
fsm->msg = "read()";
fsm->state = STATE_Ex;
}
}
else if (fsm->len == 0) // 读完,变为终止态
{
fsm->state = STATE_T;
}
else // 变为写态
{
fsm->pos = 0; // 位置清零
fsm->state = STATE_W;
}
break;
case STATE_W:
writelen = write(fsm->dfd, fsm->buf + fsm->pos, fsm->len);
// 写够没有(读的个数是否等于写的个数)
if (writelen < 0) // 出错,看真错还是假错
{
if (errno == EAGAIN) // 假错,继续写
{
fsm->state = STATE_W;
}
else // 真错,去异常态
{
fsm->msg = "write()";
fsm->state = STATE_Ex;
}
}
else
{
fsm->pos += writelen; // 记录当前写到的位置,要是没写够,下次从当前位置接着写
fsm->len -= writelen;
if (fsm->len == 0) // 读多少就成功的写了多少,那就回到读态继续
{
fsm->state = STATE_R;
}
else // 写的个数小于读的个数,从当前位置继续去写
{
fsm->state = STATE_W;
}
}
break;
case STATE_Ex:
// 异常态就报报错就可以前往终止态了
perror(fsm->msg);
fsm->state = STATE_T;
break;
case STATE_T:
/*do sth*/
break;
default:
/*do sth*/
break;
}
}
// 返回两数较大的那个
static int max(int a, int b)
{
if (a > b)
{
return a;
}
return b;
}
static void relay(int fd1, int fd2)
{
int fd1_save, fd2_save;
struct fsm_st fsmab, fsmba;
fd_set read_set, write_set;
int res;
// 首先把两个文件加上非阻塞性质
fd1_save = fcntl(fd1, F_GETFL);
fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
fd2_save = fcntl(fd2, F_GETFL);
fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
// 状态机赋值
fsmab.state = STATE_R;
fsmab.sfd = fd1;
fsmab.dfd = fd2;
fsmba.state = STATE_R;
fsmba.sfd = fd2;
fsmba.dfd = fd1;
// 开始推动状态机运行
while (fsmab.state != STATE_T || fsmba.state != STATE_T)
{
// 布置监视任务
// 清空集合
FD_ZERO(&read_set);
FD_ZERO(&write_set);
// 加入集合
if (fsmab.state == STATE_R)
{
FD_SET(fsmab.sfd, &read_set);
}
if (fsmab.state == STATE_W)
{
FD_SET(fsmab.dfd, &write_set);
}
if (fsmba.state == STATE_R)
{
FD_SET(fsmba.sfd, &read_set);
}
if (fsmba.state == STATE_W)
{
FD_SET(fsmba.dfd, &write_set);
}
// 监视
res = select(max(fd1, fd2) + 1, &read_set, &write_set, NULL, NULL);
if (res < 0)
{
if (errno == EINTR) // 如果是假错
{
continue;
}
// 如果是真错
perror("select()");
exit(1);
}
// 查看监视结果
if (FD_ISSET(fsmab.sfd, &read_set) || FD_ISSET(fsmab.dfd, &write_set))
{
fsm_driver(&fsmab);
}
if (FD_ISSET(fsmba.sfd, &read_set) || FD_ISSET(fsmba.dfd, &write_set))
{
fsm_driver(&fsmba);
}
}
// 注意,退出这个模块的时候,应该把状态恢复到进入这个模块之前的状态
fcntl(fd1, F_SETFL, fd1_save);
fcntl(fd2, F_SETFL, fd2_save);
}
int main()
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR);
if (fd1 < 0)
{
perror("open()");
exit(1);
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK);
if (fd2 < 0)
{
perror("open()");
exit(1);
}
// 中继
relay(fd1, fd2);
close(fd2);
close(fd1);
exit(0);
}运行看一下CPU: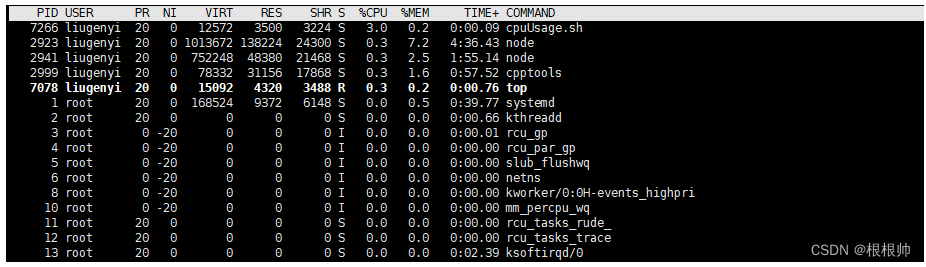
对比一下之前的: 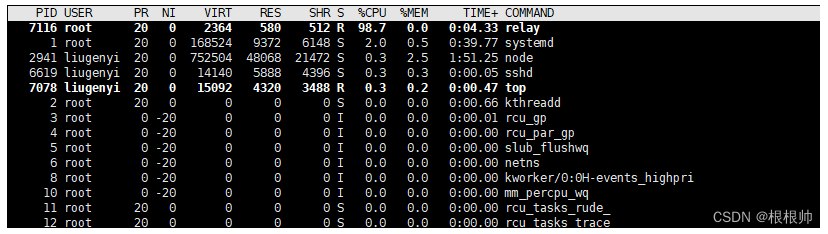
select其实最大的缺陷就是它的监视现场和监视结果放在同一片空间的,比如现在read集合10fd,write里10个,except里10个,然后read等到了一个,select返回1,这个时候你的write和except里的10个也随之被清空了。。。。这就很难受,这也是上面程序中为什么我们的continue要跳大的while,然后重新设置监视任务,这里只有两个还好,想想之前我们写的那个四个设备两个之间传消息的程序,最多可以有10000个任务,那每次重新设置10000个监视任务就更难受了。其次效率问题:每次调用 select 都需要将所有的文件描述符从用户空间复制到内核空间,这可能会导致性能问题,特别是当需要监视大量的文件描述符时。select 的效率可能不如其他的多路 I/O 复用技术,如 epoll。并且,当需要监视的文件描述符数量增加时,select 的性能可能会下降,因为它需要遍历整个fd_set。
接下来我们介绍第二种--poll
poll是以文件描述符来组织事件的,即:在文件描述符的基础上来等待一些事件的;而select刚好相反,select是以事件为单位来组织文件描述符的。
#include <poll.h>
int poll(struct pollfd *fds, nfds_t nfds, int timeout);
//fds:结构体数组
//nfds:文件描述符个数
//timeout:超时设置 -1:阻塞 0:非阻塞 >0(毫秒为单位)超时时间
struct pollfd {
int fd; /* file descriptor */
short events; /* requested events */
short revents; /* returned events */
};接下来我们用poll来代替刚刚的select:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#include <sys/select.h>
#include <poll.h>
#define TTY1 "/dev/tty11"
#define TTY2 "/dev/tty12"
#define BUFSIZE 1024
struct pollfd pollfds[2];
// 状态
enum
{
STATE_R = 1,
STATE_W,
STATE_Ex,
STATE_T
};
// 状态机
struct fsm_st
{
int state; // 状态
int sfd; // 源
int dfd; // 目标
char buf[BUFSIZE]; // 读写缓冲
int pos; // 文件读取位置
int len; // 读到的数量
char *msg; // 信息
};
// 状态机推动
static void fsm_driver(struct fsm_st *fsm)
{
int writelen;
switch (fsm->state)
{
case STATE_R:
fsm->len = read(fsm->sfd, fsm->buf, BUFSIZE);
if (fsm->len < 0) // 出错,判断假错还是真错
{
if (errno == EAGAIN) // 假错:暂时没内容读到,那就继续读
{
fsm->state = STATE_R;
}
else // 真错,变为异常态
{
fsm->msg = "read()";
fsm->state = STATE_Ex;
}
}
else if (fsm->len == 0) // 读完,变为终止态
{
fsm->state = STATE_T;
}
else // 变为写态
{
fsm->pos = 0; // 位置清零
fsm->state = STATE_W;
}
break;
case STATE_W:
writelen = write(fsm->dfd, fsm->buf + fsm->pos, fsm->len);
// 写够没有(读的个数是否等于写的个数)
if (writelen < 0) // 出错,看真错还是假错
{
if (errno == EAGAIN) // 假错,继续写
{
fsm->state = STATE_W;
}
else // 真错,去异常态
{
fsm->msg = "write()";
fsm->state = STATE_Ex;
}
}
else
{
fsm->pos += writelen; // 记录当前写到的位置,要是没写够,下次从当前位置接着写
fsm->len -= writelen;
if (fsm->len == 0) // 读多少就成功的写了多少,那就回到读态继续
{
fsm->state = STATE_R;
}
else // 写的个数小于读的个数,从当前位置继续去写
{
fsm->state = STATE_W;
}
}
break;
case STATE_Ex:
// 异常态就报报错就可以前往终止态了
perror(fsm->msg);
fsm->state = STATE_T;
break;
case STATE_T:
/*do sth*/
break;
default:
/*do sth*/
break;
}
}
// 返回两数较大的那个
static int max(int a, int b)
{
if (a > b)
{
return a;
}
return b;
}
static void relay(int fd1, int fd2)
{
int fd1_save, fd2_save;
struct fsm_st fsmab, fsmba;
fd_set read_set, write_set;
// 首先把两个文件加上非阻塞性质
fd1_save = fcntl(fd1, F_GETFL);
fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
fd2_save = fcntl(fd2, F_GETFL);
fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
// 状态机赋值
fsmab.state = STATE_R;
fsmab.sfd = fd1;
fsmab.dfd = fd2;
fsmba.state = STATE_R;
fsmba.sfd = fd2;
fsmba.dfd = fd1;
// pollfds赋值,这里不用每次循环赋值,因此放外面即可
pollfds[0].fd = fd1;
pollfds[1].fd = fd2;
// 开始推动状态机运行
while (fsmab.state != STATE_T || fsmba.state != STATE_T)
{
// 布置监视任务
// 清空fd1事件
pollfds[0].events = 0;
if (fsmab.state == STATE_R)
{
pollfds[0].events |= POLLIN;
}
if (fsmba.state == STATE_W)
{
pollfds[0].events |= POLLOUT;
}
// 清空fd2事件
pollfds[1].events = 0;
if (fsmab.state == STATE_W)
{
pollfds[1].events |= POLLOUT;
}
if (fsmba.state == STATE_R)
{
pollfds[1].events |= POLLIN;
}
// 监视
// 因为poll中,select监视结果存放位置是单独的,不会覆盖原来的
// 因此可以直接将这里写为while,continue就可以不用跳到最外层的while了,这也克服了select的缺点之一
while (poll(pollfds, 2, -1) < 0)
{
if (errno == EINTR) // 如果是假错
{
continue;
}
// 如果是真错
perror("poll()");
exit(1);
}
// 查看监视结果
// 因为结果是位图,因此用按位与的方式去查看结果
// 如果a可读或者b可写,即可推状态机ab
if (pollfds[0].revents & POLLIN || pollfds[1].revents & POLLOUT)
{
fsm_driver(&fsmab);
}
// 如果b可读或者a可写,即可推状态机ba
if (pollfds[1].revents & POLLIN || pollfds[0].revents & POLLOUT)
{
fsm_driver(&fsmba);
}
}
// 注意,退出这个模块的时候,应该把状态恢复到进入这个模块之前的状态
fcntl(fd1, F_SETFL, fd1_save);
fcntl(fd2, F_SETFL, fd2_save);
}
int main()
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR);
if (fd1 < 0)
{
perror("open()");
exit(1);
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK);
if (fd2 < 0)
{
perror("open()");
exit(1);
}
// 中继
relay(fd1, fd2);
close(fd2);
close(fd1);
exit(0);
}总之,poll各方面要比select好得多,因此我们使用poll比使用select更多些。
接下来我们介绍最后一种--epoll epoll其实是对poll加了个封装,让我们不能直接操作pollfds数组,并且epoll有个特色就是它有个union共用体,可以记录每个fd的操作。但是epoll不可移植,因为他是linux的方言
#include <sys/epoll.h>
//创建指epoll实例
int epoll_create(int size);
int epoll_create1(int flags);
//Since Linux 2.6.8, the size argument is ignored, but must be greater than zero;
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
//epfd:epoll实例
//op:操作
//fd:文件描述符
//event:操作的事件
typedef union epoll_data {
void *ptr;
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;
struct epoll_event {
uint32_t events; /* Epoll events */
epoll_data_t data; /* User data variable */
};
int epoll_wait(int epfd, struct epoll_event *events, int maxevents, int timeout);//取事件
//epfd:epoll实例
//events:事件
//maxevents:因为一次可以取多个事件出来,所以可以设置数量上限。就会取maxevents个事件出来,放进events空间中去
//timeout:超时设置(单位毫秒),0表示非阻塞,-1表示阻塞同样的,我们使用epoll来重写上面的程序:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#include <sys/select.h>
#include <sys/epoll.h>
#define TTY1 "/dev/tty11"
#define TTY2 "/dev/tty12"
#define BUFSIZE 1024
struct epoll_event ev;
// 状态
enum
{
STATE_R = 1,
STATE_W,
STATE_Ex,
STATE_T
};
// 状态机
struct fsm_st
{
int state; // 状态
int sfd; // 源
int dfd; // 目标
char buf[BUFSIZE]; // 读写缓冲
int pos; // 文件读取位置
int len; // 读到的数量
char *msg; // 信息
};
// 状态机推动
static void fsm_driver(struct fsm_st *fsm)
{
int writelen;
switch (fsm->state)
{
case STATE_R:
fsm->len = read(fsm->sfd, fsm->buf, BUFSIZE);
if (fsm->len < 0) // 出错,判断假错还是真错
{
if (errno == EAGAIN) // 假错:暂时没内容读到,那就继续读
{
fsm->state = STATE_R;
}
else // 真错,变为异常态
{
fsm->msg = "read()";
fsm->state = STATE_Ex;
}
}
else if (fsm->len == 0) // 读完,变为终止态
{
fsm->state = STATE_T;
}
else // 变为写态
{
fsm->pos = 0; // 位置清零
fsm->state = STATE_W;
}
break;
case STATE_W:
writelen = write(fsm->dfd, fsm->buf + fsm->pos, fsm->len);
// 写够没有(读的个数是否等于写的个数)
if (writelen < 0) // 出错,看真错还是假错
{
if (errno == EAGAIN) // 假错,继续写
{
fsm->state = STATE_W;
}
else // 真错,去异常态
{
fsm->msg = "write()";
fsm->state = STATE_Ex;
}
}
else
{
fsm->pos += writelen; // 记录当前写到的位置,要是没写够,下次从当前位置接着写
fsm->len -= writelen;
if (fsm->len == 0) // 读多少就成功的写了多少,那就回到读态继续
{
fsm->state = STATE_R;
}
else // 写的个数小于读的个数,从当前位置继续去写
{
fsm->state = STATE_W;
}
}
break;
case STATE_Ex:
// 异常态就报报错就可以前往终止态了
perror(fsm->msg);
fsm->state = STATE_T;
break;
case STATE_T:
/*do sth*/
break;
default:
/*do sth*/
break;
}
}
// 返回两数较大的那个
static int max(int a, int b)
{
if (a > b)
{
return a;
}
return b;
}
static void relay(int fd1, int fd2)
{
int fd1_save, fd2_save;
struct fsm_st fsmab, fsmba;
fd_set read_set, write_set;
int epfd;
// 首先把两个文件加上非阻塞性质
fd1_save = fcntl(fd1, F_GETFL);
fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
fd2_save = fcntl(fd2, F_GETFL);
fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
// 状态机赋值
fsmab.state = STATE_R;
fsmab.sfd = fd1;
fsmab.dfd = fd2;
fsmba.state = STATE_R;
fsmba.sfd = fd2;
fsmba.dfd = fd1;
// 创建epoll实例
epfd = epoll_create(10);
if (epfd < 0)
{
perror("epoll_create()");
exit(1);
}
// 给epfd实例的fd1加上ev事件
ev.events = 0;
ev.data.fd = fd1;
epoll_ctl(epfd, EPOLL_CTL_ADD, fd1, &ev);
// 给epfd实例的fd2加上ev事件
ev.events = 0;
ev.data.fd = fd2;
epoll_ctl(epfd, EPOLL_CTL_ADD, fd2, &ev);
// 开始推动状态机运行
while (fsmab.state != STATE_T || fsmba.state != STATE_T)
{
// 布置监视任务
ev.data.fd = fd1;
ev.events = 0;
if (fsmab.state == STATE_R)
{
ev.events |= EPOLLIN;
}
if (fsmba.state == STATE_W)
{
ev.events |= EPOLLOUT;
}
epoll_ctl(epfd, EPOLL_CTL_MOD, fd1, &ev);
ev.data.fd = fd2;
ev.events = 0;
if (fsmab.state == STATE_W)
{
ev.events |= EPOLLOUT;
}
if (fsmba.state == STATE_R)
{
ev.events |= EPOLLIN;
}
epoll_ctl(epfd, EPOLL_CTL_MOD, fd2, &ev);
// 监视
// 因为poll中,select监视结果存放位置是单独的,不会覆盖原来的
// 因此可以直接将这里写为while,continue就可以不用跳到最外层的while了,这也克服了select的缺点之一
while (epoll_wait(epfd, &ev, 1, -1) < 0)
{
if (errno == EINTR) // 如果是假错
{
continue;
}
// 如果是真错
perror("epoll()");
exit(1);
}
// 查看监视结果
// 因为结果是位图,因此用按位与的方式去查看结果
// 如果a可读或者b可写,即可推状态机ab
if ((ev.data.fd == fd1 && ev.events & EPOLLIN) || (ev.data.fd == fd2 && ev.events & EPOLLOUT))
{
fsm_driver(&fsmab);
}
// 如果b可读或者a可写,即可推状态机ba
if ((ev.data.fd == fd2 && ev.events & EPOLLIN) || (ev.data.fd == fd1 && ev.events & EPOLLOUT))
{
fsm_driver(&fsmba);
}
}
// 注意,退出这个模块的时候,应该把状态恢复到进入这个模块之前的状态
fcntl(fd1, F_SETFL, fd1_save);
fcntl(fd2, F_SETFL, fd2_save);
close(epfd);
}
int main()
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR);
if (fd1 < 0)
{
perror("open()");
exit(1);
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK);
if (fd2 < 0)
{
perror("open()");
exit(1);
}
// 中继
relay(fd1, fd2);
close(fd2);
close(fd1);
exit(0);
}3、其他读写函数
readv、writev
这两个函数类似于read和write 函数,但是它们允许单个系统调用读入或写出多个缓冲区。
#include <sys/uio.h>
ssize_t readv(int fd, const struct iovec *iov, int iovcnt);
ssize_t writev(int fd, const struct iovec *iov, int iovcnt);
//fd:要操作的那个文件描述符
//iov:指向iovec结构的一个指针
//iovcnt:iov的个数
struct iovec {
void *iov_base; /* Starting address *///缓冲区首地址
size_t iov_len; /* Number of bytes to transfer *///缓冲区长度
};4、存储映射IO
让一个磁盘文件与存储空间中的一个缓冲区相映射。这样的话,当从缓冲区取数据,就相当于读文件中的相应字节。类似的,将数据存入缓冲区,则相应的字节就自动地写入文件。这样就可以在不使用read和write的情况下执行IO。
#include <sys/mman.h>
void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset);//映射
//addr:指定映射存储区的起始地址
//length:映射存储区的长度
//prot:权限
//flags:特殊要求
//fd:要映射的文件
//offset:相对于fd文件的偏移量
//一句口水话描述就是:从fd这个文件的offset偏移量开始,映射length个字节到addr这块地址中,映射过来的权限是prot,特殊要求是flags
int munmap(void *addr, size_t length);//解除映射
//addr:解除的空间的地址
//length:下面我们写个实例来看看怎么使用,我们写一个数指定文件中a的数量:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <unistd.h>
int main(int argc, char **argv)
{
int fd;
int i;
struct stat statres;
char *str;
int count = 0;
// 参数检查
if (argc != 2)
{
fprintf(stderr, "please use right argc!\n");
exit(1);
}
fd = open(argv[1], O_RDONLY);
if (fd < 0)
{
perror("open()");
exit(1);
}
// 获得文件大小
if (fstat(fd, &statres) < 0)
{
perror("fstat()");
exit(1);
}
// 映射
str = mmap(NULL, statres.st_size, PROT_READ, MAP_SHARED, fd, 0); // 第一个位置写NULL表示让它自己去找个空间,我就不人为指定了
if (str == MAP_FAILED)
{
perror("mmap()");
exit(1);
}
close(fd);
for (i = 0; i < statres.st_size; ++i)
{
if (str[i] == 'a')
{
count++;
}
}
printf("%d\n", count);
munmap(str, statres.st_size);
exit(0);
}运行结果:
liugenyi@liugenyi-virtual-machine:~/linuxsty/advio/mmap$ ./mmap /etc/services
517接下来我们使用这个存储映射来实现一个父子进程通信的例子,让子进程向共享内存里写,父进程从共享内存里读:
#include <stdio.h>
#include <stdlib.h>
#include <sys/mman.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#include <string.h>
#define MEMSIZE 1024
int main()
{
char *ptr;
pid_t pid;
ptr = mmap(NULL, MEMSIZE, PROT_READ | PROT_WRITE, MAP_SHARED | MAP_ANONYMOUS, -1, 0); // fd写-1表示不依赖任何文件描述符;MAP_ANONYMOUS匿名映射:映射区不与任何文件关联
if (ptr == MAP_FAILED)
{
perror("mmap()");
exit(1);
}
pid = fork();
if (pid < 0) // 创建子进程失败
{
munmap(ptr, MEMSIZE);
perror("fork()");
exit(1);
}
if (pid == 0) // 子进程写
{
strcpy(ptr, "hello world !");
munmap(ptr, MEMSIZE);
exit(0);
}
else // 父进程读
{
wait(NULL);
puts(ptr);
munmap(ptr, MEMSIZE);
exit(0);
}
exit(0);
}运行结果:
liugenyi@liugenyi-virtual-machine:~/linuxsty/advio/mmap$ ./shm
hello world !5、文件锁
实现文件锁可以有这三个函数:fcntl()、lockf()、flock()
用法都差不多,我这里就主要以lockf为例来看看怎么用:
#include <unistd.h>
int lockf(int fd, int cmd, off_t len);
//fd:文件描述符
//cmd:命令
//len:加锁等操作的长度,如果写0表示对整个文件操作,就算这个文件未来长度发生变化也无所谓现在我们对之前多线程阶段写过的一个例子(add.c,20个线程向同一个文件里+1,我们当时用的多线程和pthread_mutex互斥量来实现的)用多进程和文件锁来实现:
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <sys/wait.h>
#define PROCNUM 20 // 进程数量
#define BUFSIZE 1024
#define FILENAME "/tmp/out"
static void func_add(void)
{
FILE *fp;
int fd;
char buf[BUFSIZ];
// 打开文件
fp = fopen(FILENAME, "r+"); // 读写,并且保证文件存在,因此用r+
if (fp == NULL)
{
perror("fopen()");
exit(1);
}
// 获取文件fd
fd = fileno(fp);
if (fd < 0)
{
perror("fileno()");
exit(1);
}
// 文件加锁
lockf(fd, F_LOCK, 0);
// 读文件
fgets(buf, BUFSIZ, fp);
// 定向到文件开头
fseek(fp, 0, SEEK_SET);
sleep(1);
// 写文件
fprintf(fp, "%d\n", atoi(buf) + 1);
// 文件是全缓冲,注意刷新
fflush(fp);
// 文件解锁
lockf(fd, F_ULOCK, 0);
// 关闭文件,注意关闭文件要放在lockf后,不然会造成文件意外解锁
fclose(fp);
// 线程终止
return;
}
int main()
{
pid_t pid;
int i;
for (i = 0; i < PROCNUM; ++i) // 创建20个进程
{
pid = fork();
if (pid < 0) // 创建子进程失败
{
// 我这里笼统报错退出,其实应该去收尸成功创建的子进程
perror("fork()");
exit(1);
}
if (pid == 0) // 子进程
{
func_add();
exit(0);
}
}
// 父进程收尸子进程
for (i = 0; i < PROCNUM; ++i)
{
wait(NULL);
}
exit(0);
}
运行结果:
liugenyi@liugenyi-virtual-machine:~/linuxsty/advio/lockf$ echo 1 > /tmp/out
liugenyi@liugenyi-virtual-machine:~/linuxsty/advio/lockf$ cat /tmp/out
1
liugenyi@liugenyi-virtual-machine:~/linuxsty/advio/lockf$ ./add
liugenyi@liugenyi-virtual-machine:~/linuxsty/advio/lockf$ cat /tmp/out
21














 2021
2021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









