







目录
一、结构设计理念及经验
先说说我对这个组的理解:硬件=入场卷(没有硬件压根就不用去比赛);控制=根基(哪怕没有视觉和结构的情况下依然可以完赛);视觉=提高(可以减少掉识别错误所增加的秒数,甚至优化找卡算法等等)结构=锦上添花(如果不追求国一国特,拿国奖没有结构也是可以的,但是一个好的结构也确实可以减缓视觉和控制的压力)。
根据对十九届赛题的解读和18届自制结构所产生的问题里,发现机械臂的速度想要变的很快就必须跟凤凰结构的机械臂类似,同时为了能完成多卡投放和结构重心居于中间,同时为了简化控制算法,研究菠萝结构的优势,最后借鉴菠萝和凤凰的设计上重新设计。效果如图所示:
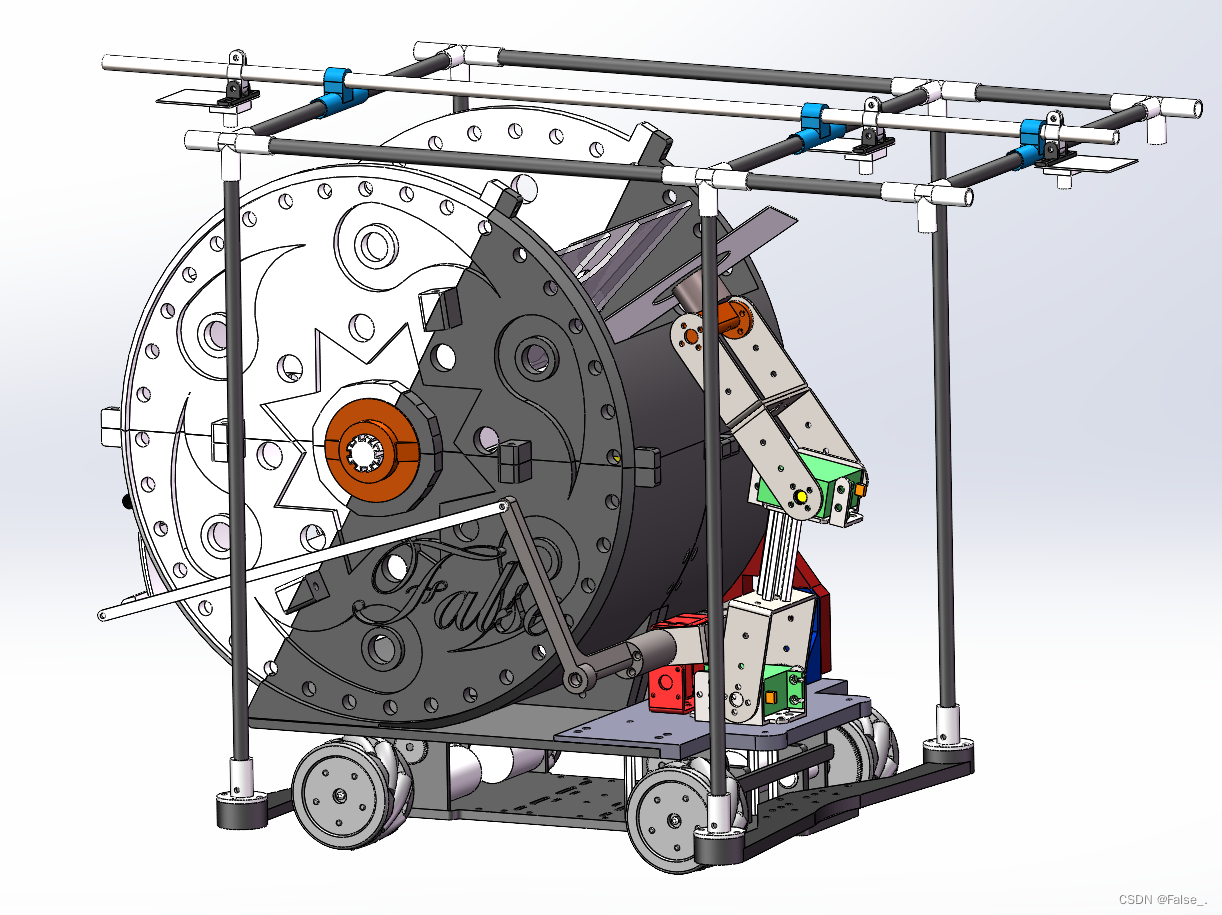
图1.1 总设计图
二、材料准备
2.1制作工具类
拓竹3D打印机(需要稍
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









