






计算机如何看到图像
计算机将图像看作矩阵。灰度图像具有一个通道(灰色),因此可以在2D矩阵中表示灰度图像,其中每个元素表示该特定像素中亮度的强度。0表示黑色,255表示白色。灰度图像有一个通道,而彩色图像有三个通道RGB(红、绿、蓝)。可以在深度为3的3D矩阵中表示彩色图像。
计算机处理图像的方法
直接从camera读取
从文件中读取
生成矩阵显示
矩阵生成图片

ROI

黑白图像

二值化

图像放大缩小
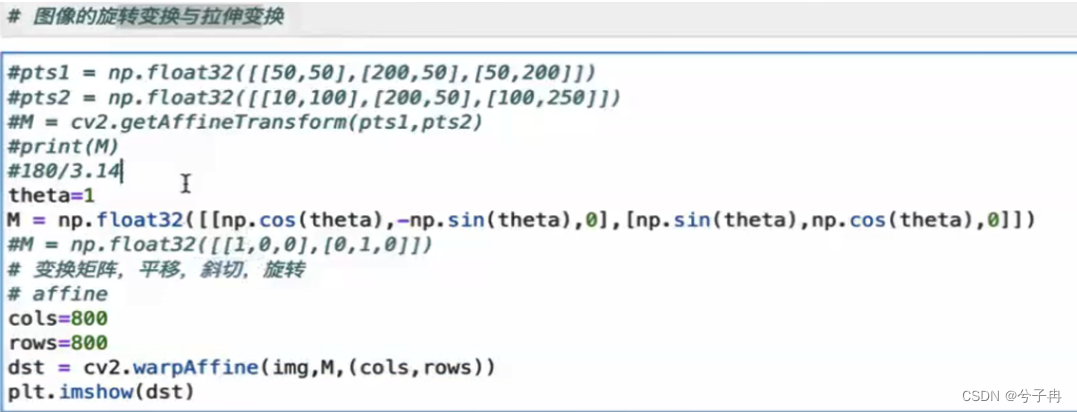
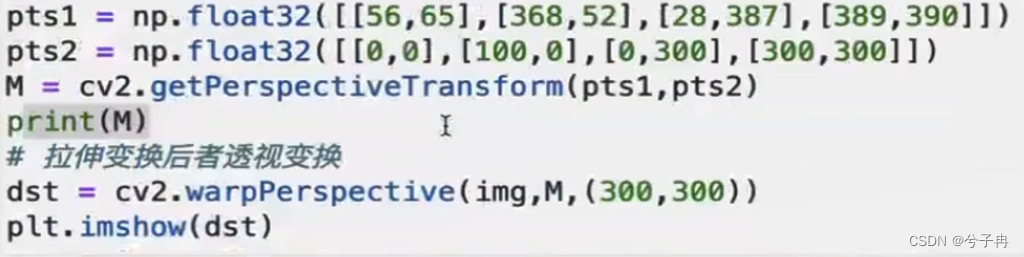
图像旋转和拉伸
颜色空间转换
模糊

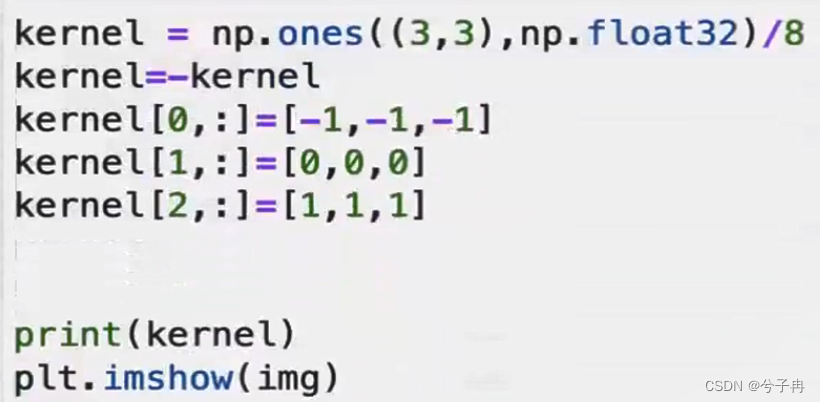
图像滤波卷积
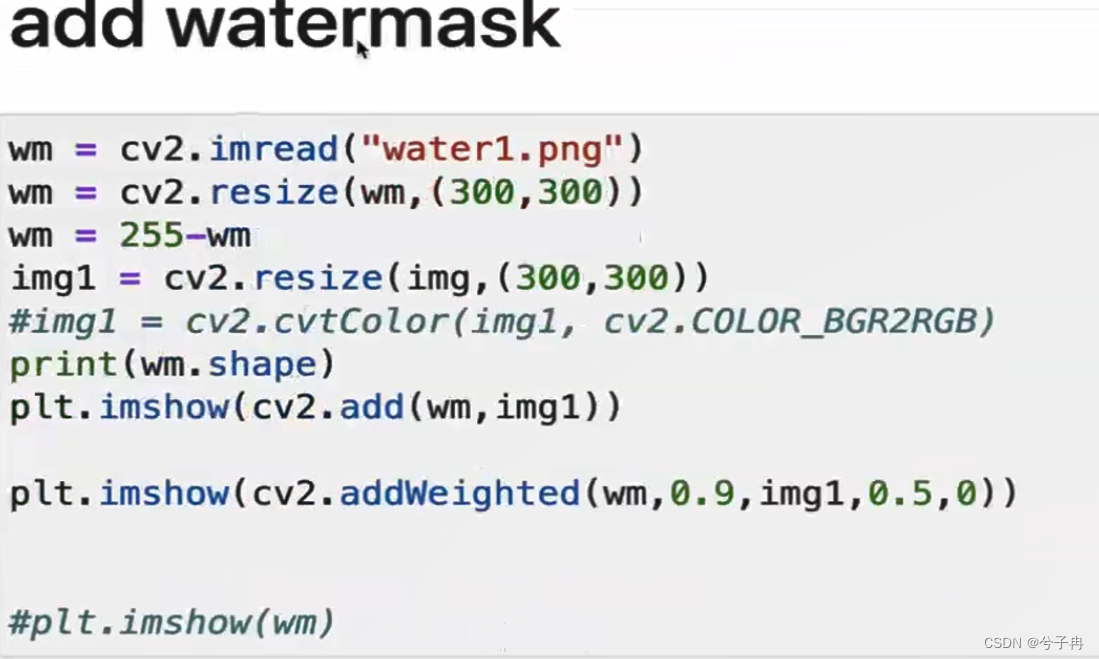
加水印
作业代码
# 显示设置: 只显示最终效果
showBestResultsOnly = False
def makeImages(images, figname, numOfCols=4):
from matplotlib.pyplot import figure
fig = figure(figname,figsize=(20,20))
fig.suptitle(figname, y=1, fontsize=30)
numOfImages = len(images)
numOfRows = numOfImages // numOfCols
if numOfImages % numOfCols != 0:
numOfRows += 1
imageIndex = 1
for key in images.keys():
ax = fig.add_subplot(numOfRows, numOfCols, imageIndex)
ax.imshow(images[key])
ax.set_title(key,fontsize=20,color=(1,0,0))
ax.set_xticks([])
ax.set_yticks([])
imageIndex += 1
return fig
def addWaterMark(img, index, mask):
from cv2 import putText,FONT_HERSHEY_SIMPLEX,split,merge
img = putText(img, index, (50, 150), FONT_HERSHEY_SIMPLEX, 5, (255, 255, 255), 10)
imgR,imgG,imgB = split(img)
maskB,maskG,maskR = split(mask)
from numpy import where
indexs = where(maskB==0)
imgR[indexs[0],indexs[1]] = 255
imgG[indexs[0], indexs[1]] = 255
imgB[indexs[0], indexs[1]] = 255
return merge((imgR,imgG,imgB))
# 读取原始图片
from cv2 import imread, cvtColor, COLOR_BGR2RGB
rawImage = imread("week1_homework.png")
rawImage = cvtColor(rawImage, COLOR_BGR2RGB)
"""
尝试自定义卷积核滤波器
"""
# 定义滤波结果集合
convFilterResImgs = {"Raw Image":rawImage}
import numpy as np
from cv2 import filter2D
for ksize in range(5, 50, 5):
# 创建卷积核
kernal = np.ones([ksize, ksize], dtype=np.float32) / (ksize ** 2)
# 滤波操作
resImage = filter2D(rawImage, -1, kernal)
convFilterResImgs["ksize = " + str(ksize)] = resImage
"""
尝试常见线性滤波器
"""
# 定义滤波结果集合
linearFilterResImgs = {}
# 均值滤波
from cv2 import blur
for ksize in range(5, 24, 6):
linearFilterResImgs["Mean Filter (ksize=" + str(ksize) + ")"] = blur(rawImage, (ksize, ksize))
# 高斯滤波
from cv2 import GaussianBlur
for ksize in range(5, 24, 6):
linearFilterResImgs["Gaussian Filter (ksize=" + str(ksize) + ")"] = GaussianBlur(rawImage, (ksize, ksize), 1.5)
# 方框滤波
from cv2 import boxFilter
for ksize in range(5, 24, 6):
linearFilterResImgs["Box Filter (ksize=" + str(ksize) + ")"] = boxFilter(rawImage, -1, (ksize, ksize))
"""
尝试常见非线性滤波器
"""
# 定义滤波结果集合
nonlinearFilterResImgs = {}
# 中值滤波
from cv2 import medianBlur
for ksize in range(9, 24, 2):
nonlinearFilterResImgs["Median Filter (ksize=" + str(ksize) + ")"] = medianBlur(rawImage, ksize)
# 双边滤波
from cv2 import bilateralFilter
for ksize in range(9, 24, 2):
nonlinearFilterResImgs["Bilateral Filter (ksize=" + str(ksize) + ")"] = bilateralFilter(rawImage, ksize, sigmaColor=2, sigmaSpace=2)
"""
显示所有的效果
"""
if not showBestResultsOnly:
f1 = makeImages(convFilterResImgs, "Customized Convolutional Filters")
f2 = makeImages(linearFilterResImgs, "Linear Filters")
f3 = makeImages(nonlinearFilterResImgs, "Nonlinear Filters")
f1.show()
f2.show()
f3.show()
"""
显示各种滤波器的最佳效果
"""
# 添加水印
watermark = imread("watermark.png")
bestResultsImages = {}
bestResultsImages["Customized Kernal"] = addWaterMark(convFilterResImgs["ksize = " + str(25)],"A",watermark)
bestResultsImages["Mean"] = addWaterMark(linearFilterResImgs["Mean Filter (ksize=" + str(23) + ")"],"B",watermark)
bestResultsImages["Gaussian"] = addWaterMark(linearFilterResImgs["Gaussian Filter (ksize=" + str(23) + ")"],"C",watermark)
bestResultsImages["Box"] = addWaterMark(linearFilterResImgs["Box Filter (ksize=" + str(23) + ")"],"D",watermark)
bestResultsImages["Median"] = addWaterMark(nonlinearFilterResImgs["Median Filter (ksize=" + str(19) + ")"],"E",watermark)
bestResultsImages["Bilateral"] = addWaterMark(nonlinearFilterResImgs["Bilateral Filter (ksize=" + str(23) + ")"],"F",watermark)
f = makeImages(bestResultsImages, "Best Results", numOfCols=3)
f.show()
"""
总结:
中值滤波(ksize=19时,见Best Results图E)效果最佳
"""
from matplotlib.pyplot import imshow,show
bestRes = addWaterMark(nonlinearFilterResImgs["Median Filter (ksize=" + str(19) + ")"],"Best",watermark)
imshow(bestRes)
show()
print("中值滤波(ksize=19时)效果最佳,见图Best Results中的 图E")















 1134
1134











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









