






1. 引言
在物理模拟与游戏开发中,多小球碰撞计算是常见的计算任务。每次碰撞的计算可分为两个主要任务:碰撞检测与碰撞响应。本文将首先介绍小球碰撞响应的实现方法,随后讨论多小球碰撞检测的几种优化算法。
2. 碰撞响应
在本实验中,我们假设两个小球均为刚体,且碰撞为理想弹性碰撞,遵循动量守恒定律。碰撞响应的核心任务是计算碰撞后小球的速率及方向。
2.1 计算速率
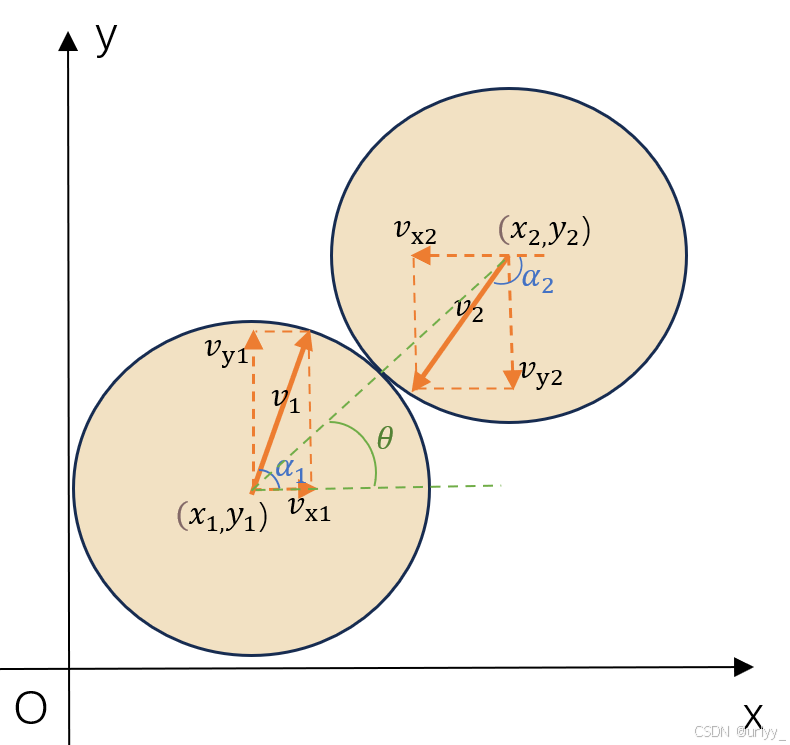
假设小球 1 和小球 2 的当前位置分别为 ( x 1 , y 1 ) (x_1, y_1) (x1,y1) 和 ( x 2 , y 2 ) (x_2, y_2) (x2,y2),当前在x轴和y轴方向的速度分量分别为 ( v x 1 , v y 1 ) (v_{x1}, v_{y1}) (vx1,vy1) 和 ( v x 2 , v y 2 ) (v_{x2}, v_{y2}) (vx2,vy2)。可以得到速率分别为 v 1 = v x 1 2 + v y 1 2 , v_1 = \sqrt{v_{x1}^2 + v_{y1}^2}, v1=vx12+vy12, v 2 = v x 2 2 + v y 2 2 v_2 = \sqrt{v_{x2}^2 + v_{y2}^2} v2=vx22+vy22。
2.2 计算碰撞角度和当前运动方向
令碰撞角度为
θ
\theta
θ,两小球的位置差为
d
x
=
x
2
−
x
1
dx=x_2-x_1
dx=x2−x1,
d
y
=
y
2
−
y
1
dy=y_2-y_1
dy=y2−y1。我们引入
a
t
a
n
2
(
y
,
x
)
atan2(y, x)
atan2(y,x) 函数,该函数可以计算从 x 轴正方向到点
(
x
,
y
)
(x, y)
(x,y) 的极角,范围为
[
−
π
,
π
]
[-\pi,\pi]
[−π,π]。在此处将位置差传入
a
t
a
n
2
atan2
atan2,根据
d
x
dx
dx 和
d
y
dy
dy 的符号来确定象限,从而得到碰撞角度,即
θ
=
a
t
a
n
2
(
d
y
,
d
x
)
\theta=atan2(dy,dx)
θ=atan2(dy,dx)。
a
t
a
n
2
(
y
,
x
)
=
{
arctan
(
y
x
)
i
f
x
>
0
,
arctan
(
y
x
)
+
π
i
f
x
<
0
a
n
d
y
≥
0
,
arctan
(
y
x
)
−
π
i
f
x
<
0
a
n
d
y
<
0
,
+
π
2
i
f
x
=
0
a
n
d
y
>
0
,
−
π
2
i
f
x
=
0
a
n
d
y
<
0
,
undefined
i
f
x
=
0
a
n
d
y
=
0.
atan2(y,x)=\begin{cases}\arctan(\frac{y}{x})&\mathrm{if~}x>0,\\\arctan(\frac{y}{x})+\pi&\mathrm{if~}x<0\mathrm{~and~}y\geq0,\\\arctan(\frac{y}{x})-\pi&\mathrm{if~}x<0\mathrm{~and~}y<0,\\+\frac{\pi}{2}&\mathrm{if~}x=0\mathrm{~and~}y>0,\\-\frac{\pi}{2}&\mathrm{if~}x=0\mathrm{~and~}y<0,\\\text{undefined}&\mathrm{if~}x=0\mathrm{~and~}y=0.\end{cases}
atan2(y,x)=⎩
⎨
⎧arctan(xy)arctan(xy)+πarctan(xy)−π+2π−2πundefinedif x>0,if x<0 and y≥0,if x<0 and y<0,if x=0 and y>0,if x=0 and y<0,if x=0 and y=0.
我们还可以用
a
t
a
n
2
atan2
atan2 函数计算小球的运动方向,
α
1
=
a
t
a
n
2
(
v
y
1
,
v
x
1
)
\alpha_1=atan2(v_{y1},v_{x1})
α1=atan2(vy1,vx1) ,
α
2
=
a
t
a
n
2
(
v
y
2
,
v
x
2
)
\alpha_2=atan2(v_{y2},v_{x2})
α2=atan2(vy2,vx2)。
2.3 速度分量的分解
对于碰撞,我们需要将速度再沿碰撞线及其法线方向分解,通过 α \alpha α和 θ \theta θ作差可以得到这个夹角。对于小球1,有 v x 1 ′ = v 1 cos ( α 1 − θ ) , v y 1 ′ = v 1 sin ( α 1 − θ ) v_{x1}^{\prime}=v_1\cos(\alpha_1-\theta),\quad v_{y1}^{\prime}=v_1\sin(\alpha_1-\theta) vx1′=v1cos(α1−θ),vy1′=v1sin(α1−θ),小球2同理。图示如下。
2.4 速度更新
基于动量守恒定律,对于小球1在碰撞线方向以及其法线方向速度分量的更新如下。
v
x
1
′
′
=
(
m
1
−
m
2
)
v
x
1
′
+
2
m
2
v
x
2
′
m
1
+
m
2
,
v
y
1
′
′
=
v
y
1
′
v_{x1}^{\prime\prime}=\frac{(m_1-m_2)v_{x1}^{\prime}+2m_2v_{x2}^{\prime}}{m_1+m_2},\quad v_{y1}^{\prime\prime}=v_{y1}^{\prime}
vx1′′=m1+m2(m1−m2)vx1′+2m2vx2′,vy1′′=vy1′
对于小球2在碰撞线方向以及其法线方向速度分量的更新如下。
v
x
2
′
′
=
(
m
2
−
m
1
)
v
x
2
′
+
2
m
1
v
x
1
′
m
1
+
m
2
,
v
y
2
′
′
=
v
y
2
′
v_{x2}^{\prime\prime}=\frac{(m_2-m_1)v_{x2}^{\prime}+2m_1v_{x1}^{\prime}}{m_1+m_2},\quad v_{y2}^{\prime\prime}=v_{y2}^{\prime}
vx2′′=m1+m2(m2−m1)vx2′+2m1vx1′,vy2′′=vy2′
最终根据沿碰撞线方向以及其法线方向的速度分量,计算更新后的沿x轴和y轴方向的速度分量。小球1的最终速度如下,小球2的速度更新同理。
v
x
1
′
′
′
=
v
x
1
′
′
cos
(
θ
)
+
v
y
1
′
′
cos
(
θ
+
π
2
)
v_{x1}^{\prime\prime\prime}=v_{x1}^{\prime\prime}\cos(\theta)+v_{y1}^{\prime\prime}\cos\left(\theta+\frac\pi2\right)
vx1′′′=vx1′′cos(θ)+vy1′′cos(θ+2π)
v
y
1
′
′
′
=
v
x
1
′
′
sin
(
θ
)
+
v
y
1
′
′
sin
(
θ
+
π
2
)
v_{y1}^{\prime\prime\prime}=v_{x1}^{\prime\prime}\sin(\theta)+v_{y1}^{\prime\prime}\sin\left(\theta+\frac\pi2\right)
vy1′′′=vx1′′sin(θ)+vy1′′sin(θ+2π)
3. 碰撞检测
碰撞检测分为 Broad-Phase 和 Narrow-Phase 两个阶段。Broad-Phase 旨在筛选出可能发生碰撞的物体,而 Narrow-Phase 则在更精确的范围内进行详细检测。
3.1 Narrow-Phase
对于两个小球,碰撞检测的条件是两球之间的距离小于等于它们半径之和,即 d = ( x 2 − x 1 ) 2 + ( y 2 − y 1 ) 2 , d ≤ r 1 + r 2 d=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2},d\leq r_1+r_2 d=(x2−x1)2+(y2−y1)2,d≤r1+r2时两球相撞。
扩展到多个小球的碰撞检测。我们自然而然能想到最朴素的方法:两两比较,时间复杂度为 O ( n 2 ) O(n^2) O(n2),当小球数量较多时效率较低。此时我们就要设计 Broad-Phase ,筛选出可能互相碰撞的小球。接下来讲解几种 Broad-Phase 的优化方法。
3.2 Broad-Phase
3.2.1 Sort and Sweep
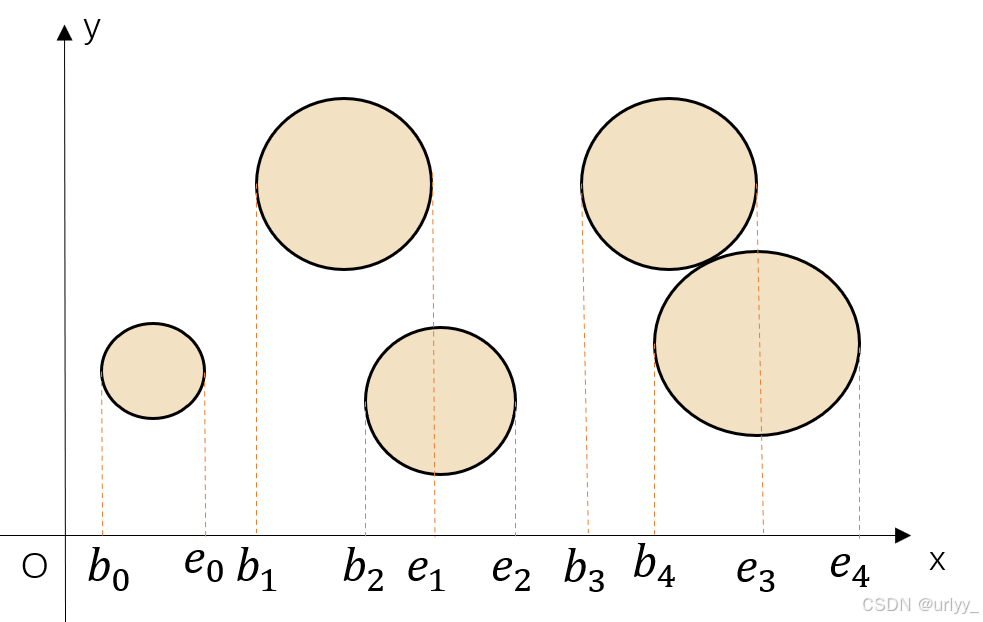
为了优化这一时间,可以采用 Sort and Sweep 方法,首先把小球投影到轴上,就得到了一个起止点数组,如下图,b为起点,e为结束点。如果两个b相邻,说明在两球在这个轴上的投影有重叠。在x、y轴上各进行一次,即可得到各球的重叠情况。
这个算法需要将各球的起点进行排序,时间复杂度为
O
(
n
l
o
g
n
)
O(nlogn)
O(nlogn),扫描过程的时间复杂度为
O
(
n
)
O(n)
O(n),排序和扫描分先后进行,所以该方法的总体时间复杂度为
O
(
n
l
o
g
n
)
O(nlogn)
O(nlogn)。
在实际的碰撞检测中,由于大部分物体的相对位置不会发生变化,在后续的帧中,只需更新有变化的球的位置,可以通过插入排序进行更新。
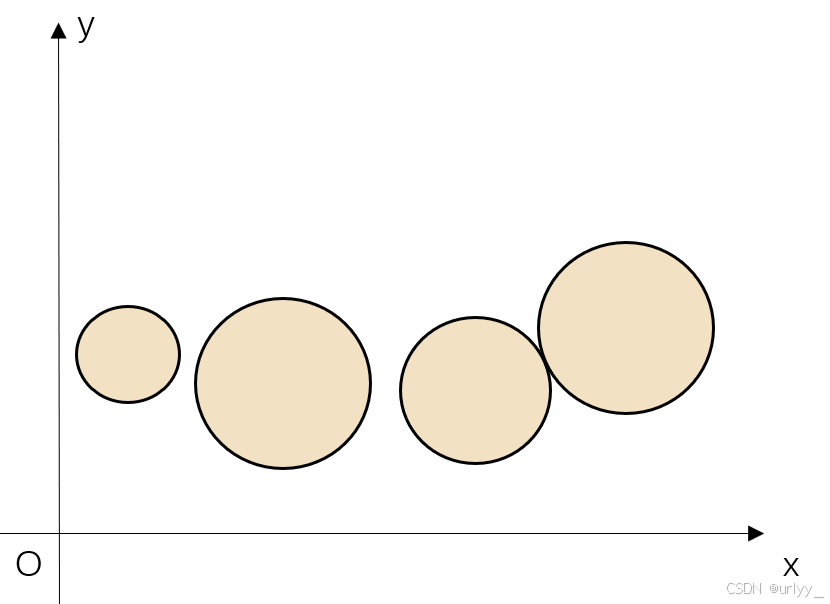
在某些情况下,小球会在某个轴上聚集,会导致该轴进行的筛选结果很差。在这种情况下可以考虑舍弃该轴的检测。在下图中就可以舍弃对y轴的检测。
3.2.2 网格划分
网格划分方法将空间划分为多个格子,如果一个小球与某个格子相交,则该格子记录该小球。最终,只有位于同一个格子的物体需要进行碰撞检测。该方法的优势在于可以避免将所有物体进行两两比对。
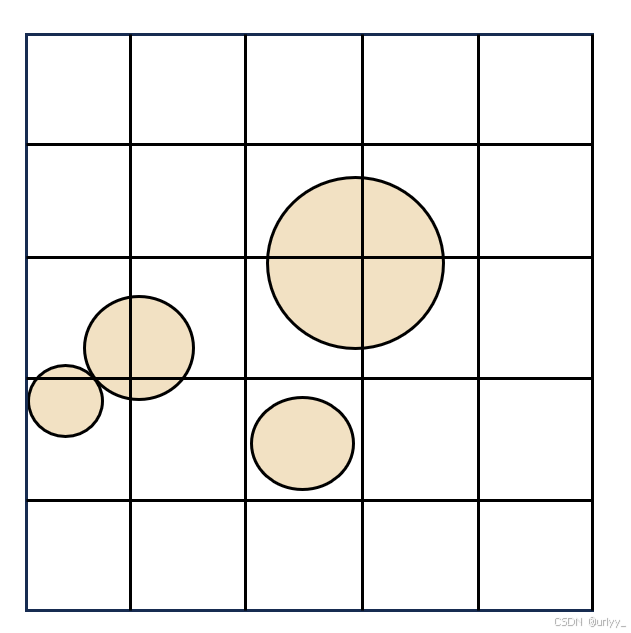
这种方法需要维护网格、额外保存小球信息。同时,选择一个合适的格子大小至关重要,太大和太小都会导致性能下降。合适的格子大小应该是跟碰撞体大小接近,如果碰撞体的大小本身就差异很大,则很难选择一个合适的大小。
对于碰撞体大小差异很大的,可以使用分层网格,即建立多个不同大小的网格,每个碰撞体都能找到一个适合自己大小的网格。
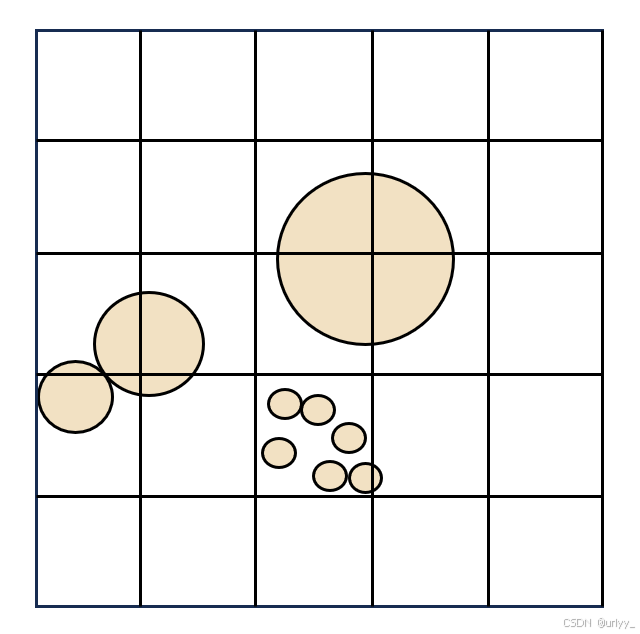
格内还可以使用 Sort and Sweep 进一步优化。
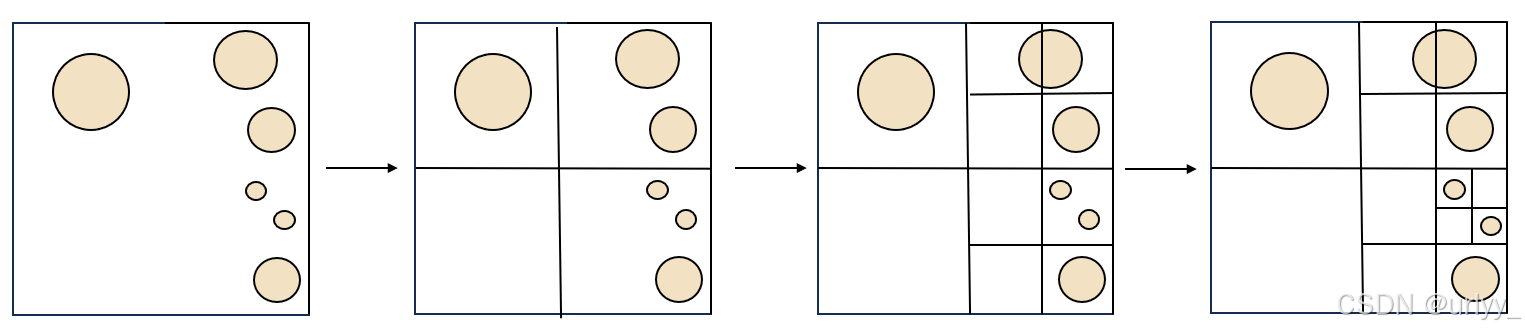
3.2.3 四叉树
在介绍四叉树前,先讲下下图这种分块的思想。与网格固定的划分不同,下图的思路是递归地对当前矩形寻找一个合适的分割轴,尽可能的将碰撞体划分开。其实这个分割操作与上文提到的 Sort and Sweep 很相像,只是前者是轴投影到碰撞体上,后者是碰撞体投影到轴上。
遍历这个通过递归操作生成的二叉树,其实就是在减少需要两两比较的碰撞体个数。
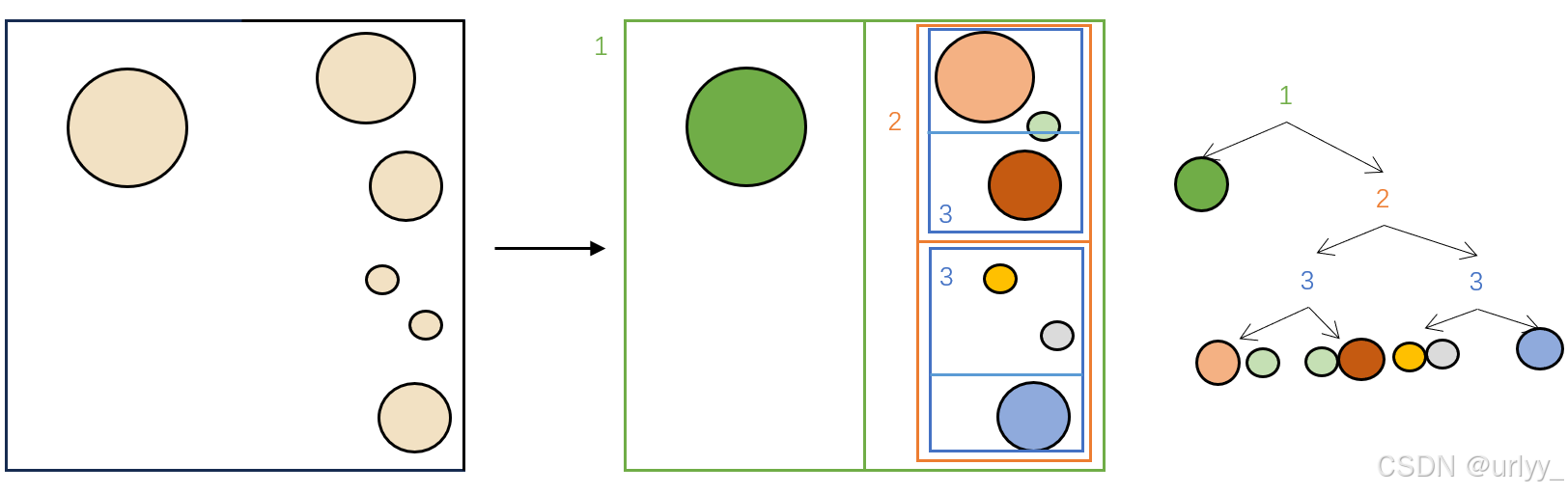
然而上图找分割轴的操作有些复杂,可以仅递归的将空间划分为相同4块。这样得到的树会是一棵四叉树。
4. 实验
基于 pygame 进行图像绘制,用帧率作为性能指标。表格内数据为几种优化手段在不同小球个数下的平均帧率。
从表格数据来看各优化算法确实比朴素暴力算法要高效,至于各算法间的对比,该数据仅供参考,因为我只做了基本的实现,还没有做一些细节处理,可能我的实现不如算法理应达到的水平。
| 小球个数 | Brute Force | Sort and Sweep | Grid | Grid & Sort and Sweep | Quadtree |
|---|---|---|---|---|---|
| 100 | 138 | 350 | 285 | 285 | 235 |
| 400 | 13 | 140 | 130 | 145 | 70 |
| 800 | 4 | 60 | 58 | 65 | 30 |
| 1600 | 1 | 19 | 20 | 22 | 11 |
实验代码见:https://github.com/urlyy/algorithm_analysis_course_tech_report
5. 结论
本报告介绍了二维刚体小球碰撞检测与响应的算法,并对几种常见的优化方法进行了实验分析。通过对不同算法的比较,我们发现 Sort and Sweep、网格划分以及四叉树方法可以有效提高碰撞检测的性能,尤其在小球数量较多时,优化方法的优势更加明显。
6. 扩展
在本实验中,我们仅考虑了二维刚体小球碰撞检测与响应。实际应用中,碰撞检测问题更加复杂,涉及到三维物体、非刚体物体(如布料、液体)以及不规则形状物体的碰撞。这里进行一些知识的补充。
6.1 三维
从二维扩展到三维是比较简单的,原先对于 x、y 轴各进行一次的操作,此时需要再对 z 轴进行一次。而像网格划分也需要考虑 z 轴。对于四叉树,则需要改为八叉树以适应三维空间中的划分。
6.2 非刚体
非刚体即布料、液体等受到外力会发生形变的物体,碰撞时需要考虑物体的弹性、塑性等材料属性,需要对物体的形变与恢复进行计算,涉及到更高级的物理模拟技术,尽管本报告主要聚焦于刚体小球的碰撞检测与响应,非刚体物体的碰撞处理无疑是物理模拟中的一个重要课题。
6.3 不规则物体
对于小球这种简单的碰撞体,Narrow-Phase 碰撞检测较为简单,仅需考虑圆心与半径。然而,扩展到更加复杂的形状,如三角形、矩形或不规则图形时,碰撞检测将变得更加复杂。这些不规则物体通常需要使用更加精确的碰撞体定义,并且在碰撞检测过程中需要额外的几何计算。
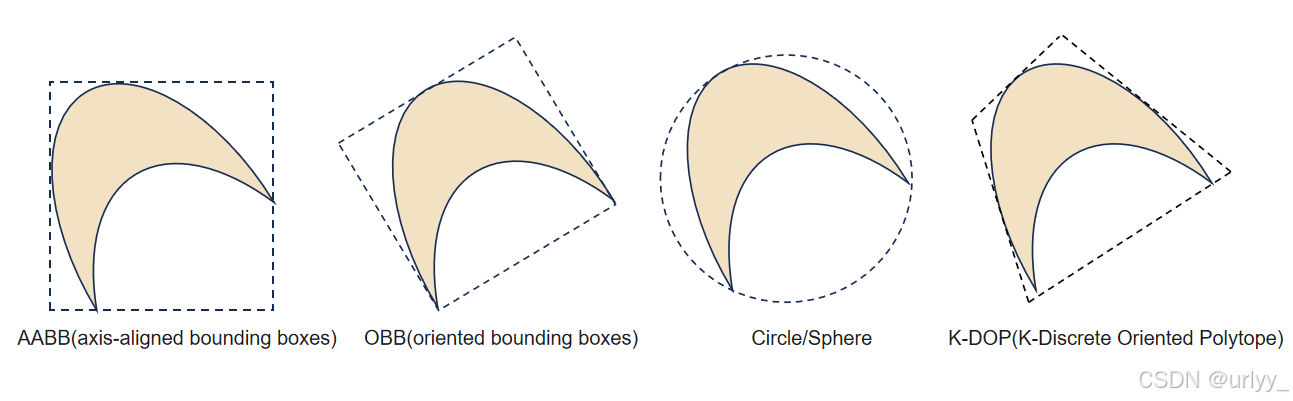
6.3.1 定义碰撞体形状
常见的碰撞体形状包括:
- AABB:直接基于 x 和 y 轴设置边界的矩形框。
- OBB:通过计算物体的旋转角度,使用旋转后的矩形框来减少碰撞盒的大小。
- Circle:将碰撞体看作一个圆形,适用于圆形物体。
- K-DOP:通过多个轴来拟合碰撞体的边缘,通常用于更复杂的几何形状。
6.3.2 设计Narrow-Phase
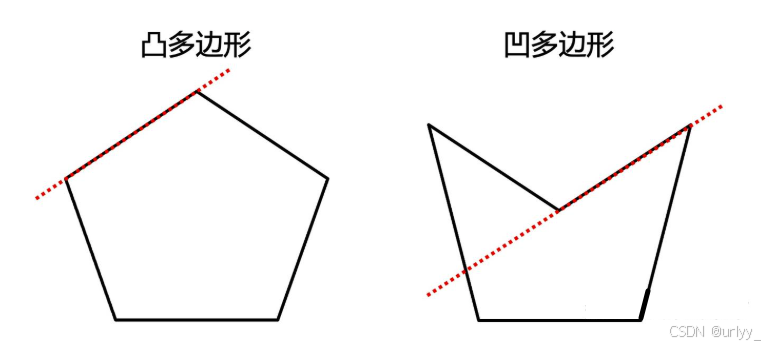
凸多边形的定义非常重要:对于平面上的一个多边形,如果延长它的任何一条边,都使整个多边形位于一边延长线的同侧,这样的多边形叫做凸多边形。
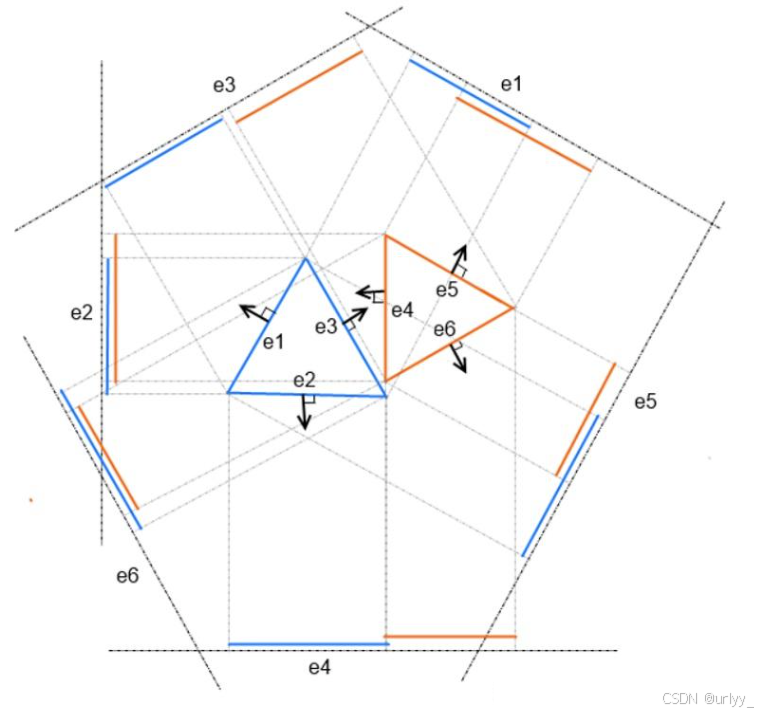
- 分离轴算法(Separating Axis Theorem, SAT)。只能用于凸多边形,在两个碰撞体比较时,使用边的垂线作为分离轴。如果存在一个投影不重叠,则可判定不相交;反之,如果所有边的垂线的投影都重叠,则判定相交。
- GJK算法,基于闵可夫斯基差,较SAT更高效。由于 GJK 算法的细节较为复杂,本文不进行深入讨论。
6.3.3 碰撞穿透
在传统的离散碰撞检测中,碰撞检测是基于帧与帧之间的离散时间步长进行的,这可能导致一些物体由于运动速度过快而穿透其他物体,这种现象被称为隧穿问题。
例如,假设一个子弹以非常高的速度向墙壁移动,在当前帧中,子弹位于墙壁的左部,而在下一帧中,由于子弹的速度过快,它可能直接穿过墙壁到达墙壁右侧,导致没有发生预期的碰撞。这种问题在高速物体模拟中尤为常见。
为了解决这一问题,传统的离散碰撞检测方法需要扩展为连续碰撞检测。在连续碰撞检测中,我们不再仅仅判断物体是否发生碰撞,而是追踪物体的运动轨迹,检查物体在两个时间步之间是否穿透了其他物体。这样可以有效避免因离散化时间步长而导致的碰撞穿透问题。相关的知识体系较为复杂,本文不进行深入讨论。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









