







系统的分类
连续系统与离散系统:输入和输出均为连续时间信号的系统称为连续时间系统;输入和输出均为离散时间信号的系统称为离散时间系统。
连续时间系统的数学模型是用微分方程来描述,而离散时间系统的数学模型是用差分方程来描述。
动态系统与即时系统:若系统在任一时刻的响应不仅与该时刻的激励有关,而且与它过去的历史状况有关,则称为动态系统或记忆系统;含有记忆元件(电容、电感等)的系统是动态系统,否则称即时系统或无记忆系统。
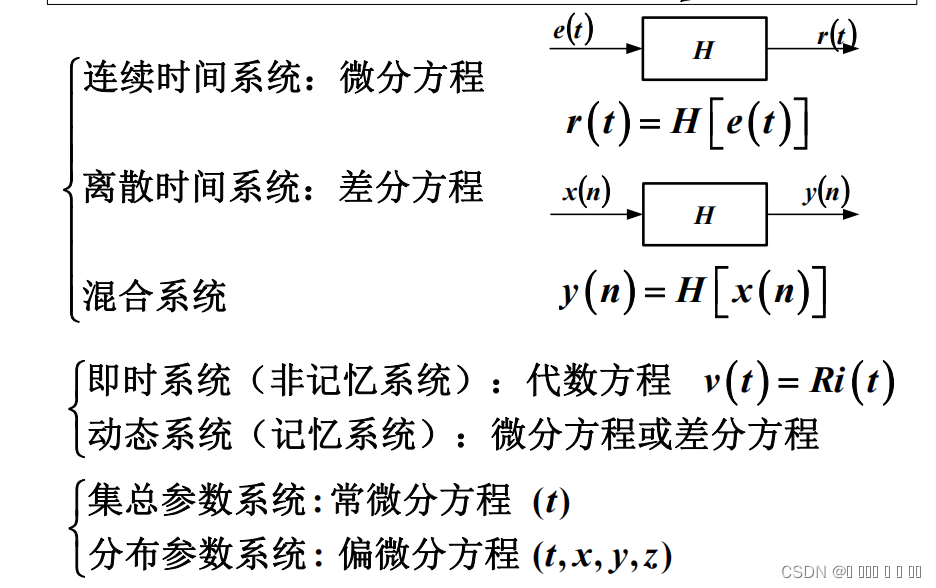
系统的数学模型:
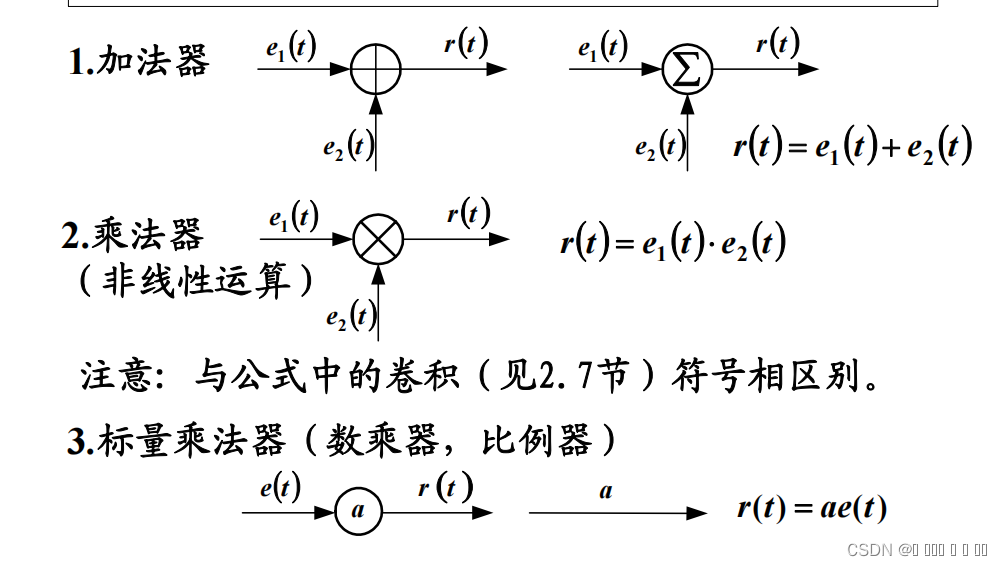
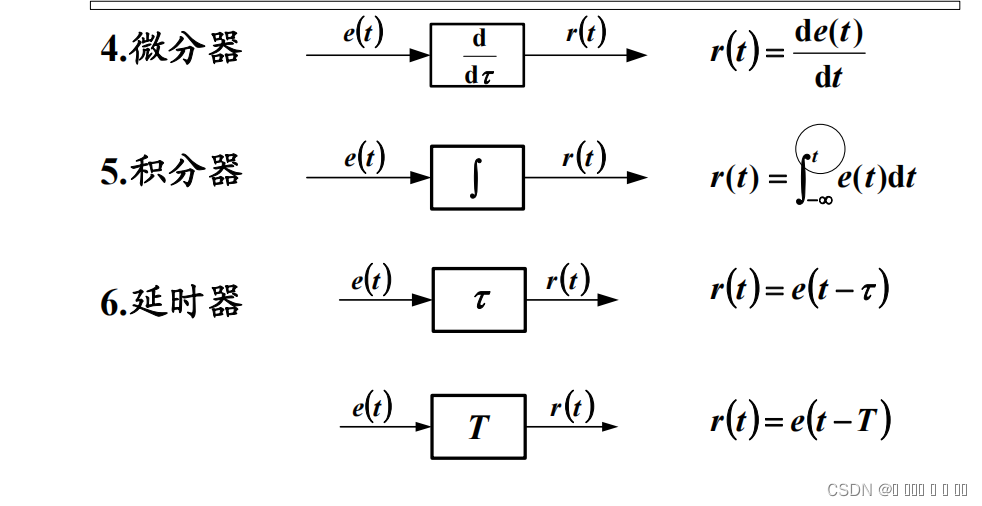
系统的框图表示

系统的特性和分析方法
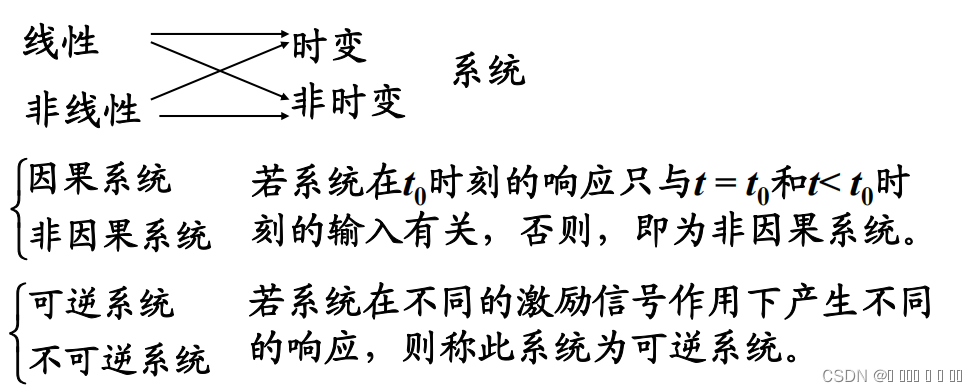
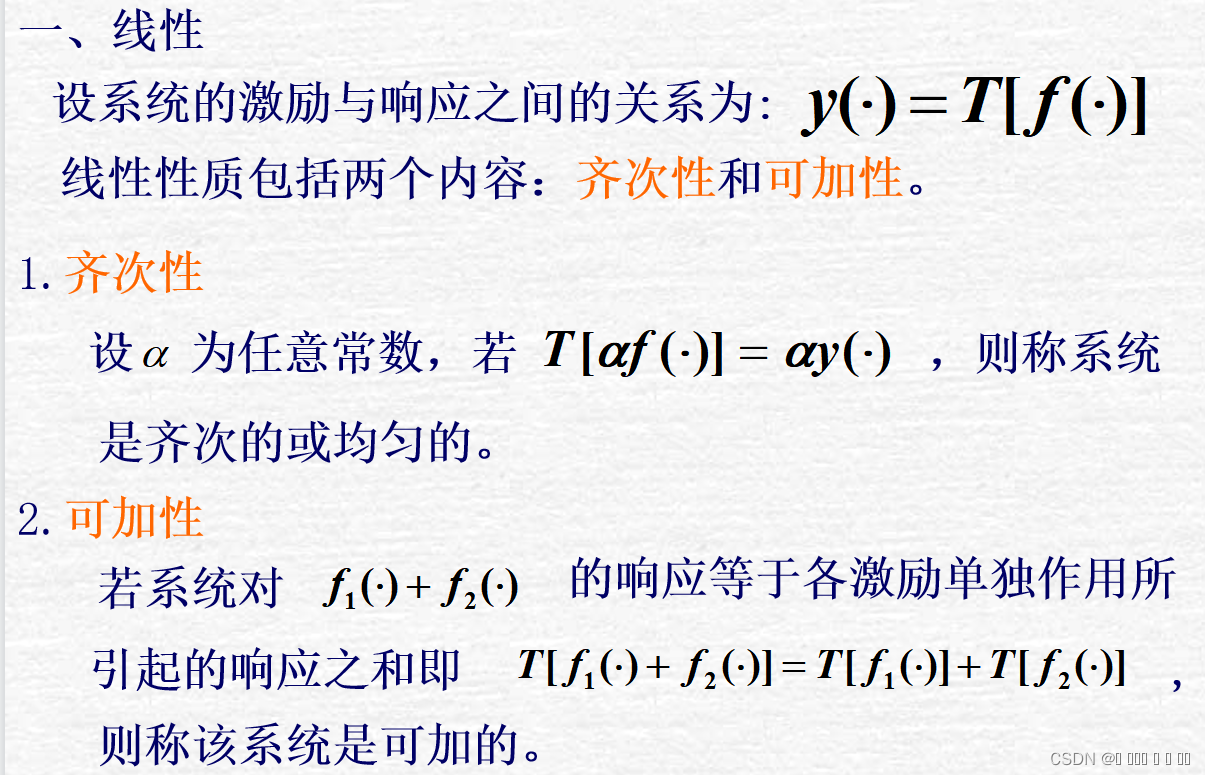
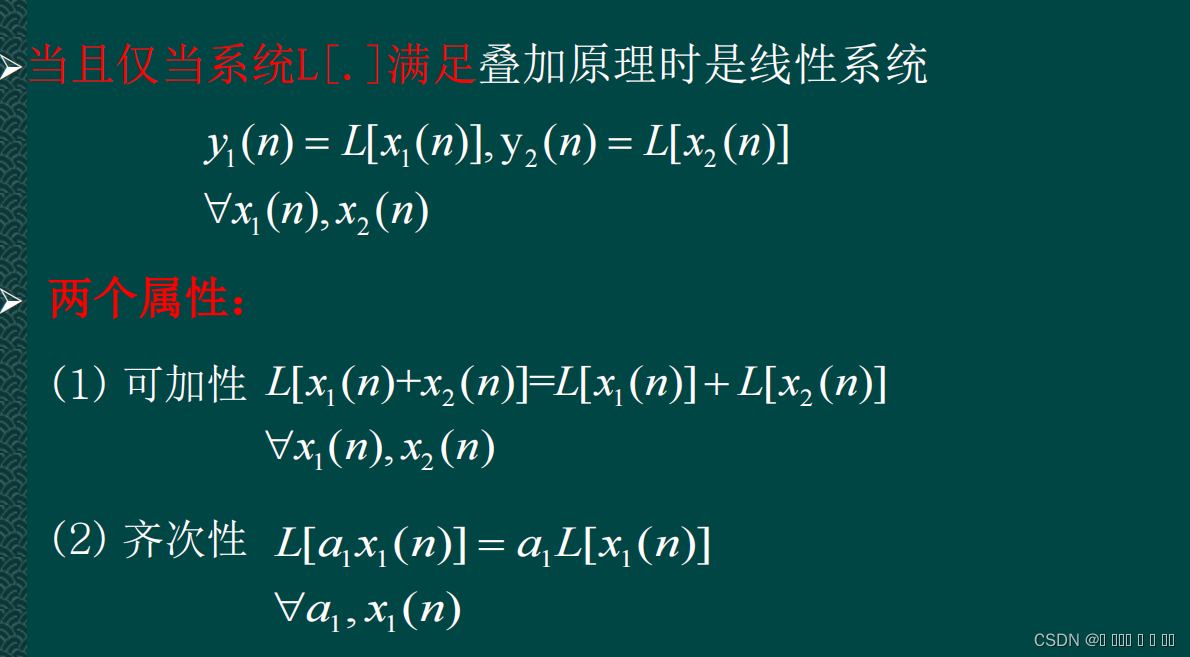
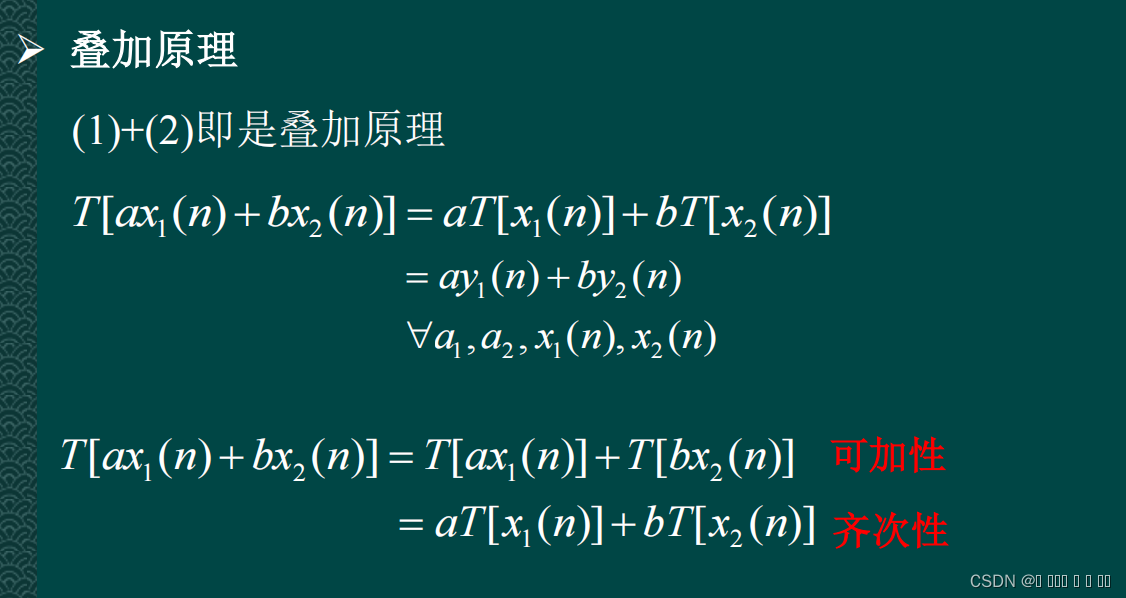
线性系统与非线性系统:能同时满足齐次性与叠加性的系统称为线性系统。满足叠加性是线性系统的必要条件;不能同时满足齐次性与叠加性的系统称为非线性系统。
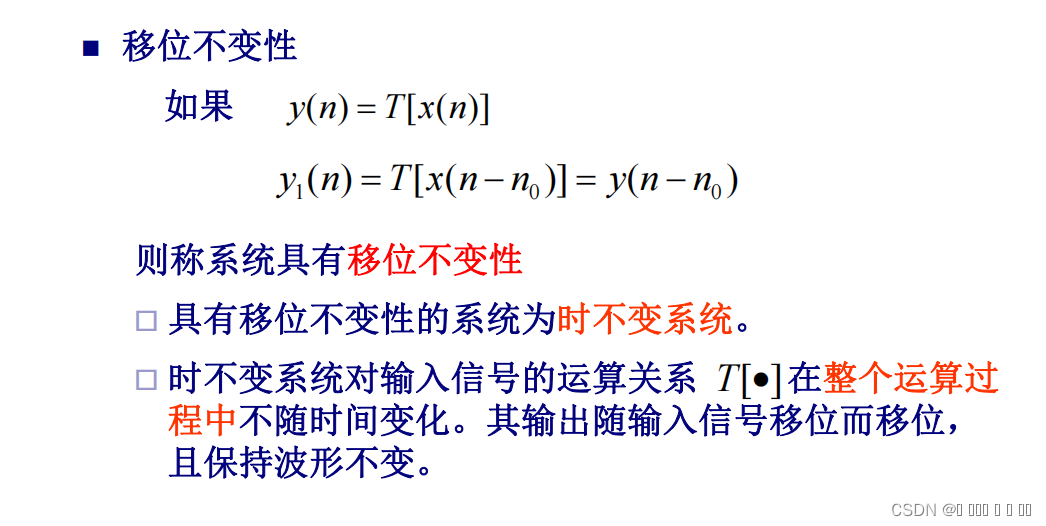
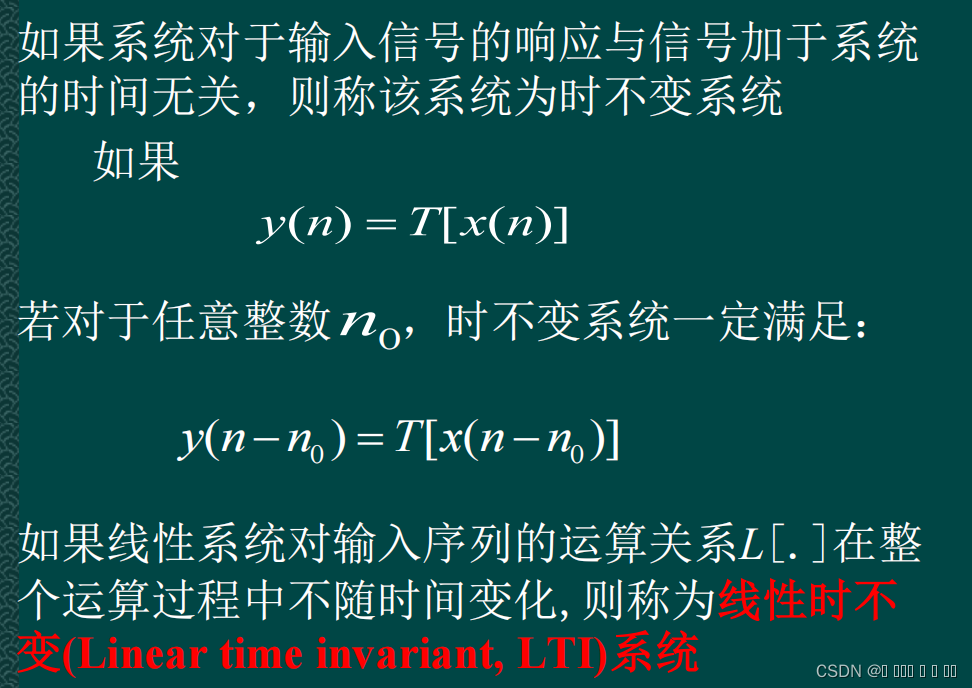
时不变系统与时变系统:满足时不变性质的系统称为时不变系统。
时不变性质:若系统满足输入延迟多少时间,其激励引起的响应也延迟多少时间。
因果系统与非因果系统:激励引起的响应不会出现在激励之前的系统,称为因果系统;也就是说,如果响应r(t)并不依赖于将来的激励[如e(t+1)],那么系统就是因果的。
稳定系统与不稳定系统:一个系统,若对有界的激励f(.)所产生的响应y=f(.)也是有界时,则称该系统为有界输入有界输出稳定,简称稳定;即若│f(.)│<∞,其│yf(.)│<∞,则称系统是稳定的。
线性时不变系统:LTI连续系统的微分特性和积分特性
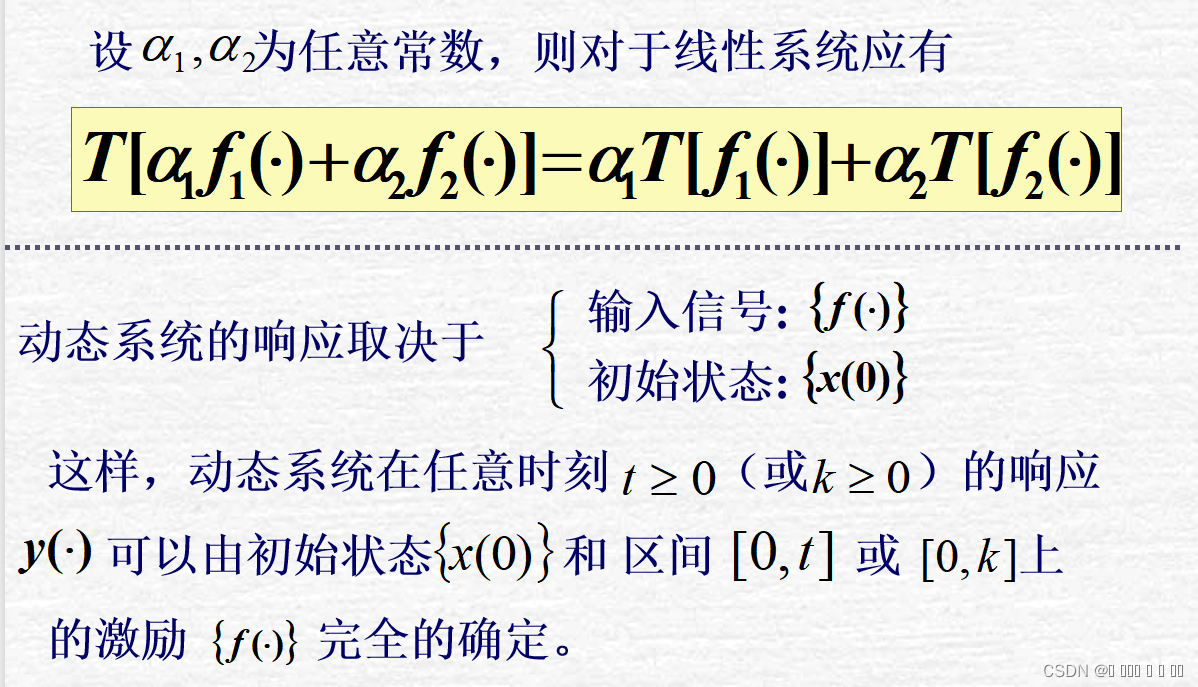
线性性质包括两方面:齐次性和可加性,若系统既是齐次的又是可加的,则称该系统是线性的,即T[a f1(·) + bf2(·)] = a T[ f1(·)] + bT[ f2(·)]。
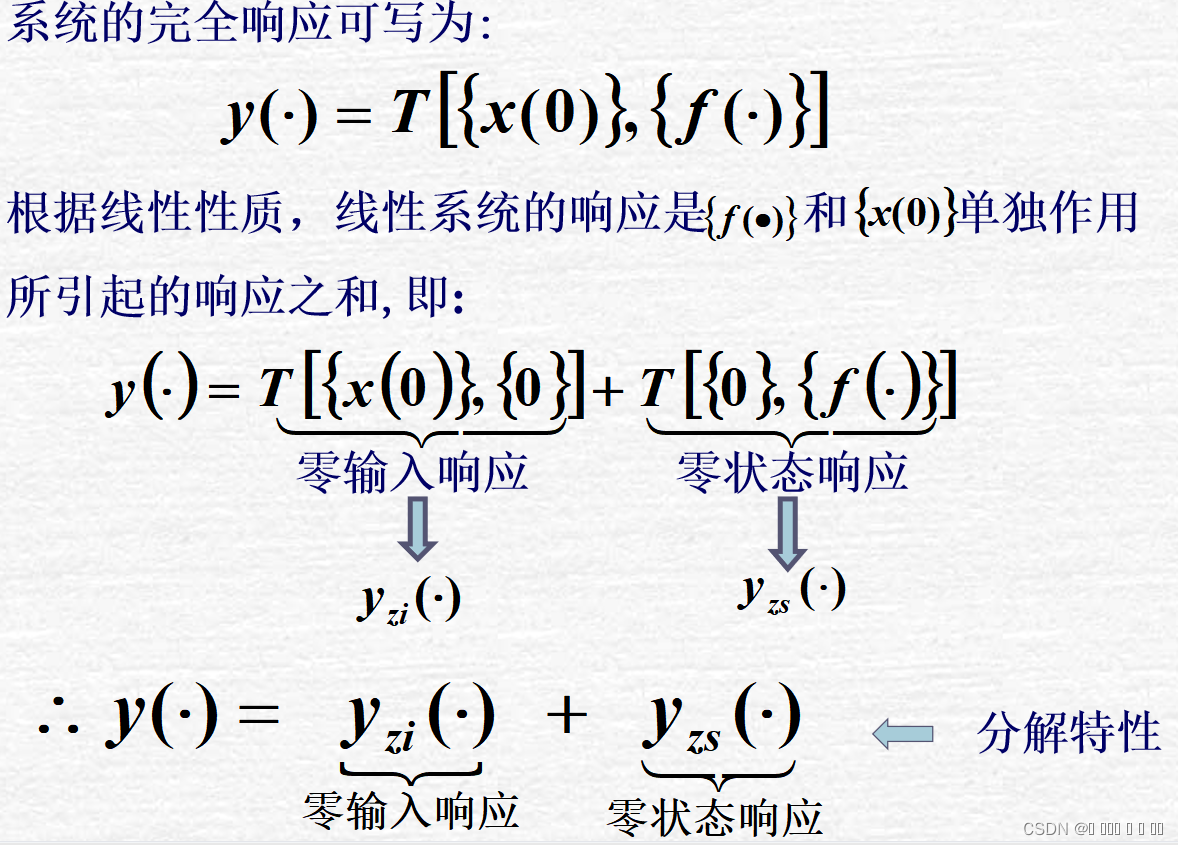
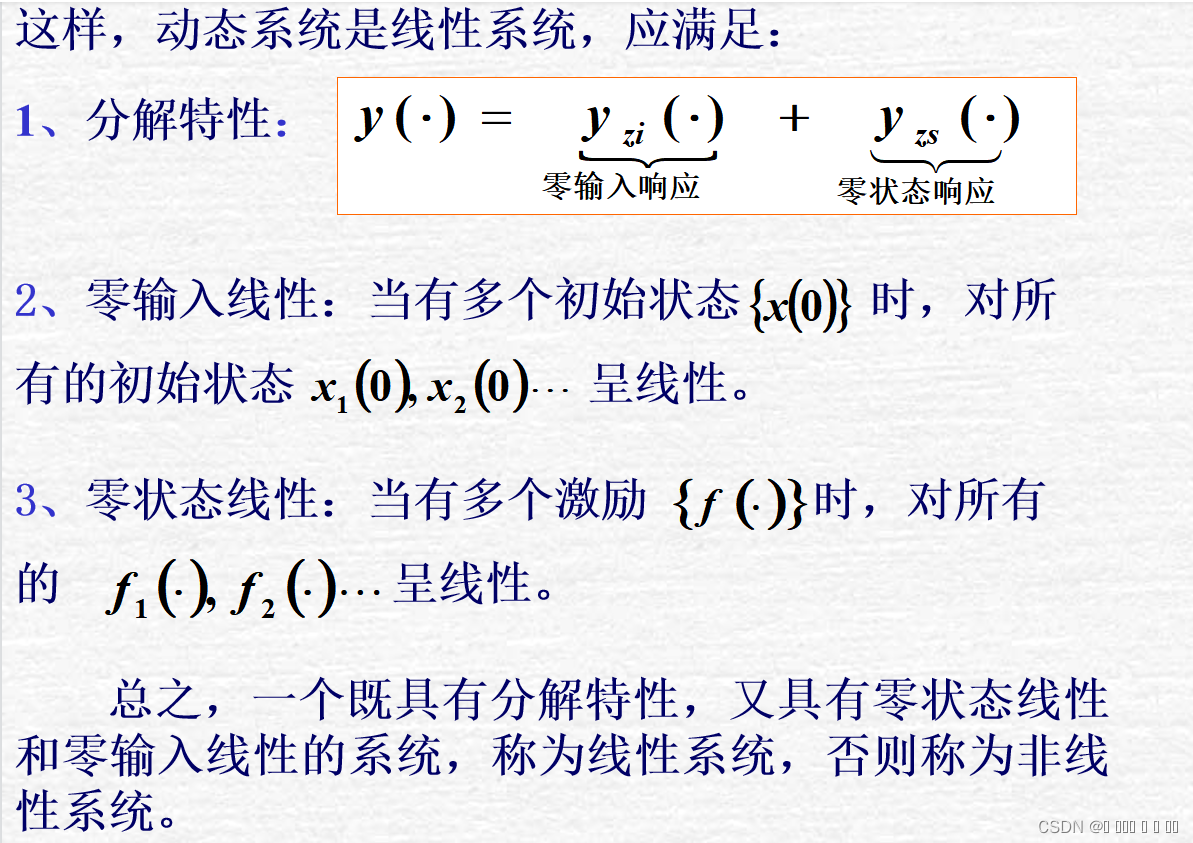
当动态系统满足下列三个条件时该系统为线性系统:可分解性+零状态线性+零输入线性。
一个系统既是齐次的又是可加的,则称该系统是线性的。
一个系统既是线性又是时不变的,称线性时不变系统。简记为LTI系统.
时域分析:


变换域法:
(1)傅里叶变换FT
(2)拉普拉斯变换LT
(3)Z变换ZT
(4)离散时间的傅里叶变换DTFT
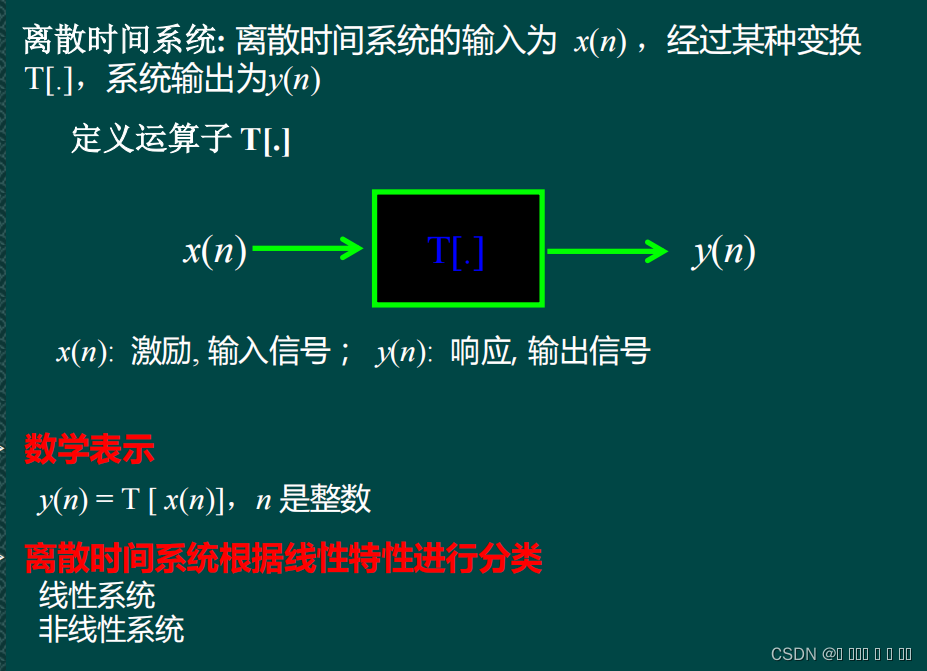
时域离散系统
在数字信号处理的理论中,人们把能加工、变换数字信号的实体称作系统。由于处理数字信号的系统是在指定的时刻或时序对信号进行加工运算,所以这种系统被看作是离散时间的,也可以用基于时间的语言、表格、公式、波形四种方法来描述。 [2] 从抽象的意义来说,系统和信号都可以看作序列。但是,系统是加工信号的机构,这点与信号不同。人们研究系统,设计系统,利用系统加工信号、服务人类。除上文的四种描述方法,描述系统的方法还有符号、单位脉冲响应、差分方程和图形。
线性时不变时域离散系统
线性性质
对于 x(n)=ax1(n)+bx2(n),有
T[ax1(n)+bx2(n)]=aT[x1(n)]+bT[x2(n)]
则称系统为线性系统(否则为非线性系统)。
判断技巧——微分方程中存在高次项 ([x(n)]2,x(n)x(n−1),⋯)、常数项时是非线性系统。
时不变特性
对于 y(n)=T[x(n)],有y1(n)=T[x(n−n0)]=y(n−n0)称系统为时不变系统(否则为时变系统)。
判断技巧——微分方程中存在变系数、输入序列存在不为 x(n±k) 的形式或形如 x(2n),x(n2),⋯ 的形式时是时变系统。
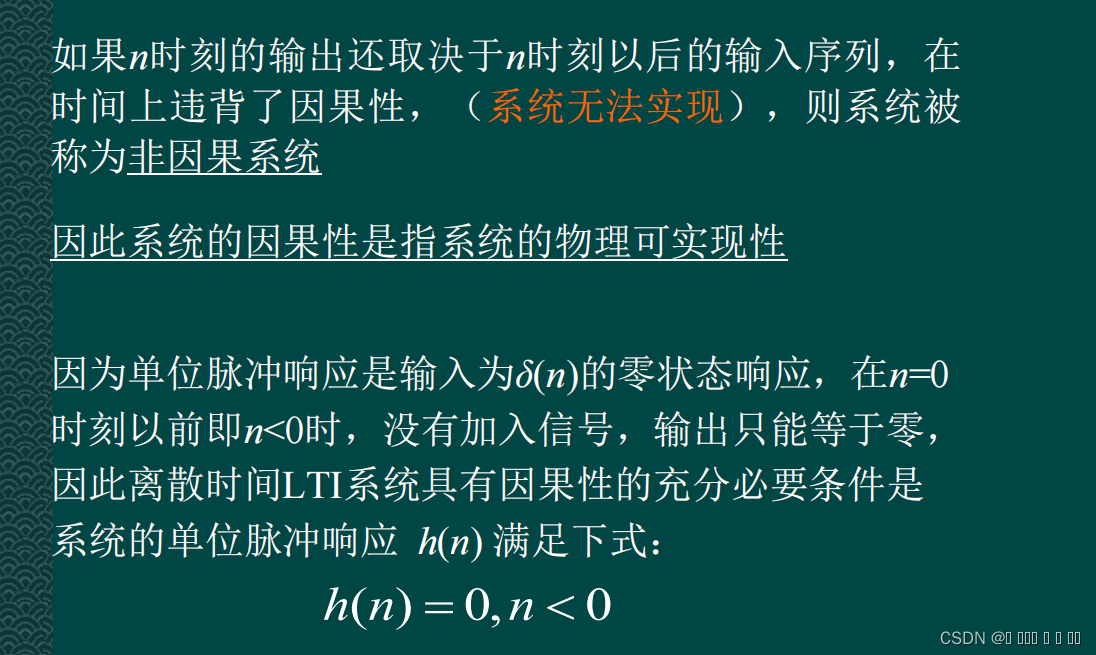
系统的因果性和稳定性
系统的因果性
h(n)=0,(n<0)称系统是因果系统(否则为非因果系统)。
判断技巧——微分方程中存在 x(n+k),x(−n±k) 的形式 (k>0)。
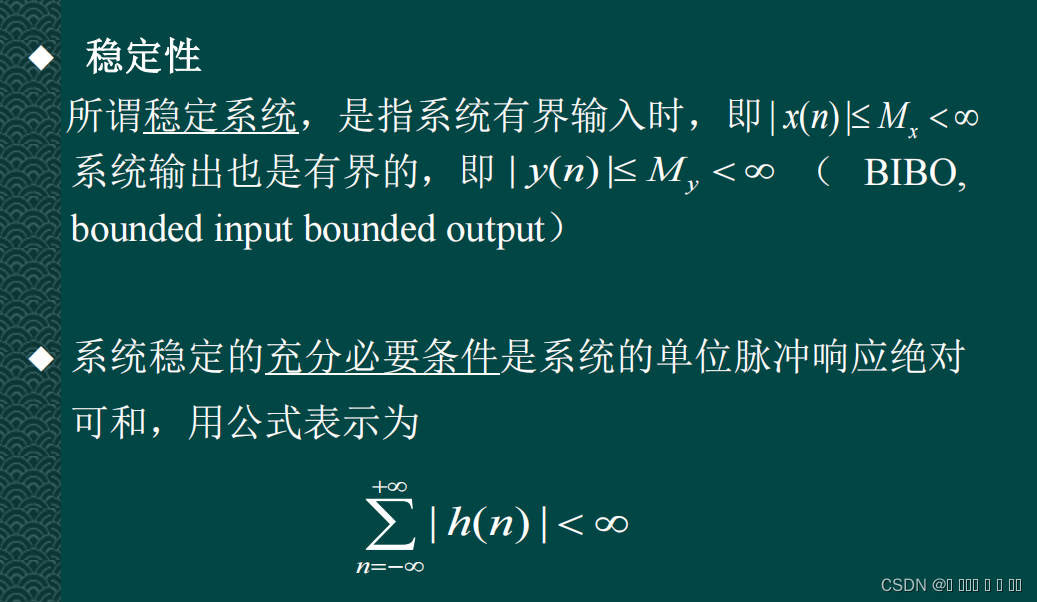
系统的稳定性
∑n=−∞∞|h(n)|<∞则称系统是稳定系统(否则为非稳定系统)。
判断技巧——冲激响应的时域取有限范围、值域有限的系统都是稳定系统。
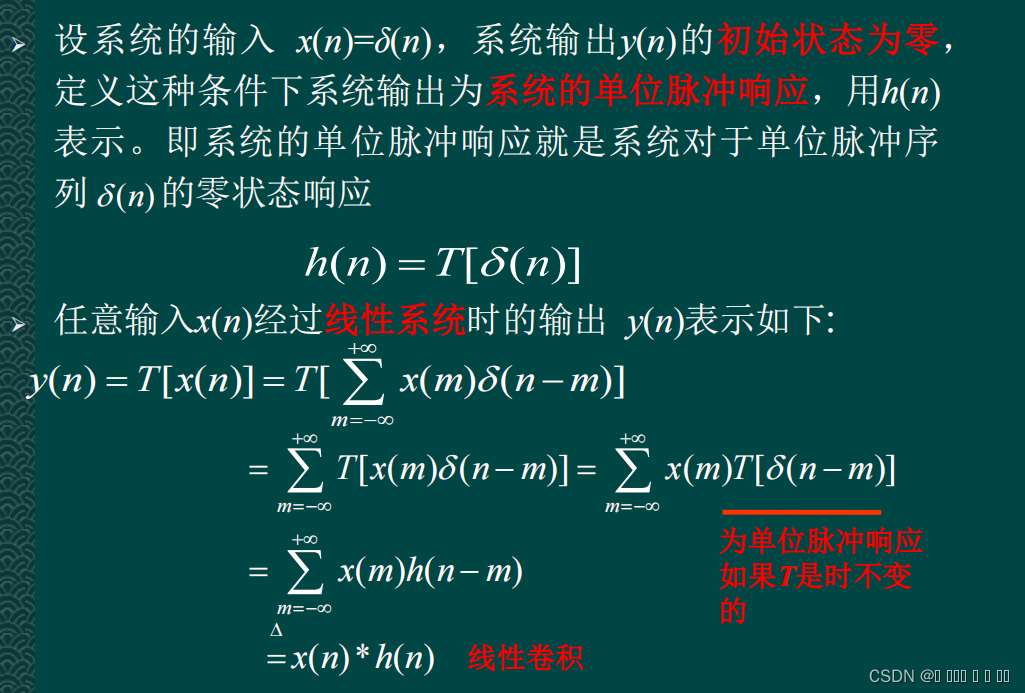
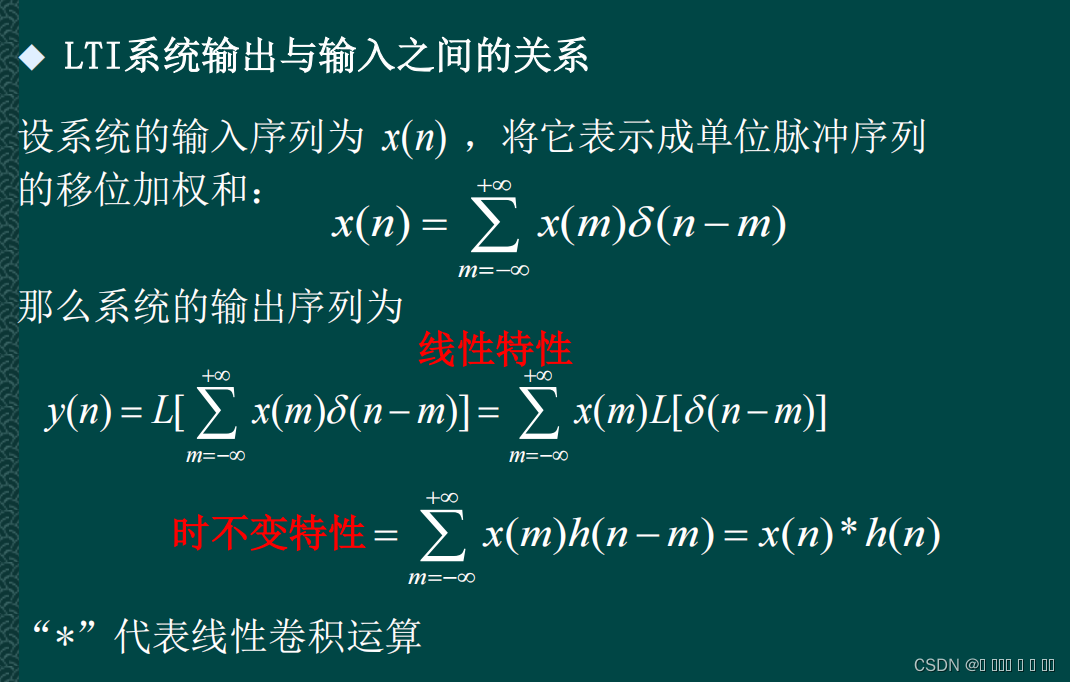
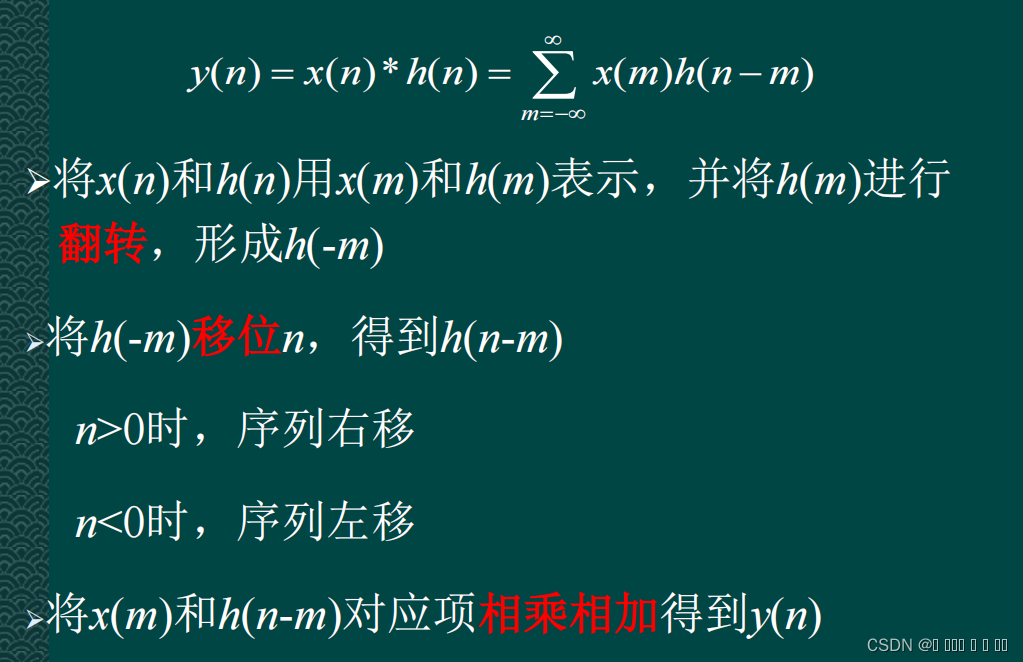
线性时不变系统的输出和输入之间的关系
对于任一激励,其对应响应均为该系统的冲激响应与该激励的卷积。
卷积的计算方法
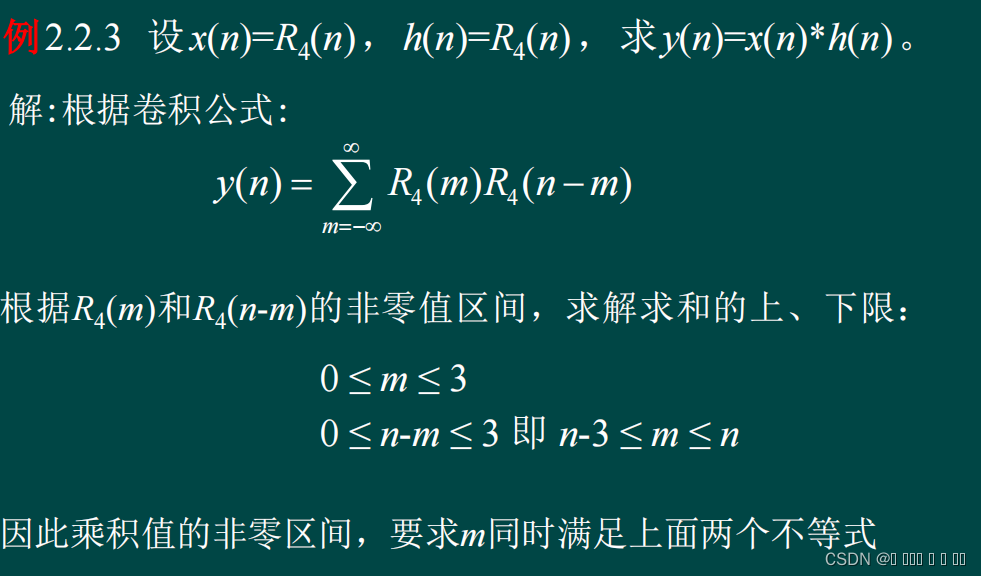
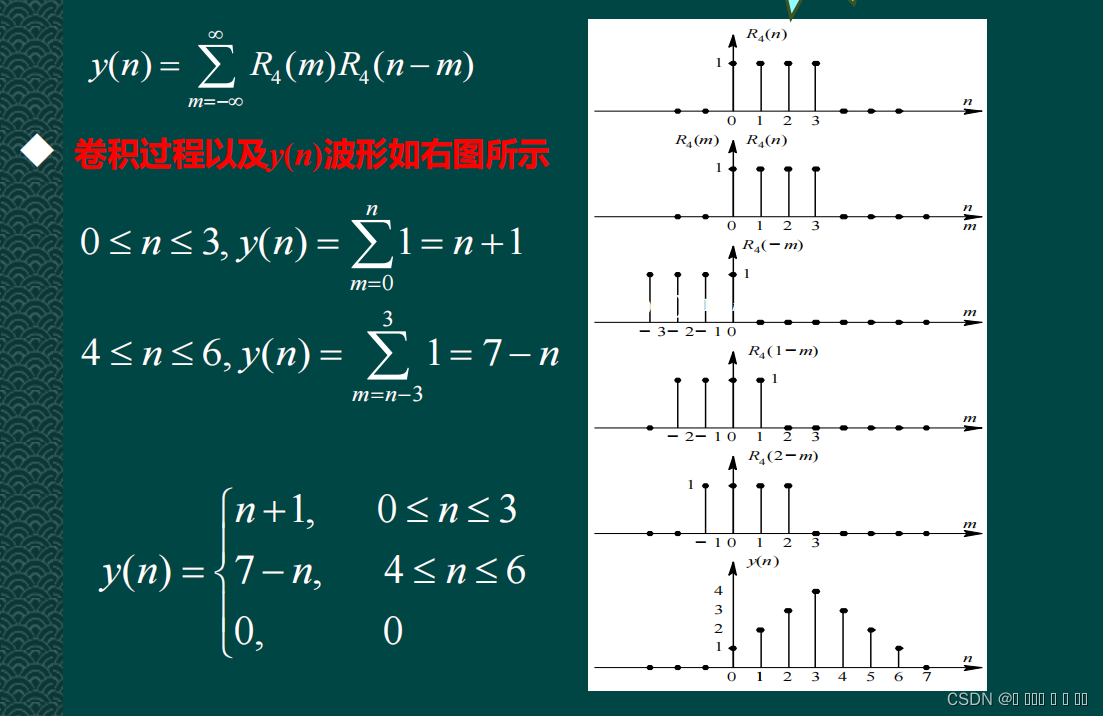
1、图解法
2、解析法
3、卷积性质
x(n)=x(n)∗δ(n)
x(n−n0)=x(n)∗δ(n−n0)
y(n)=x(n)∗h(n)=h(n)∗x(n)
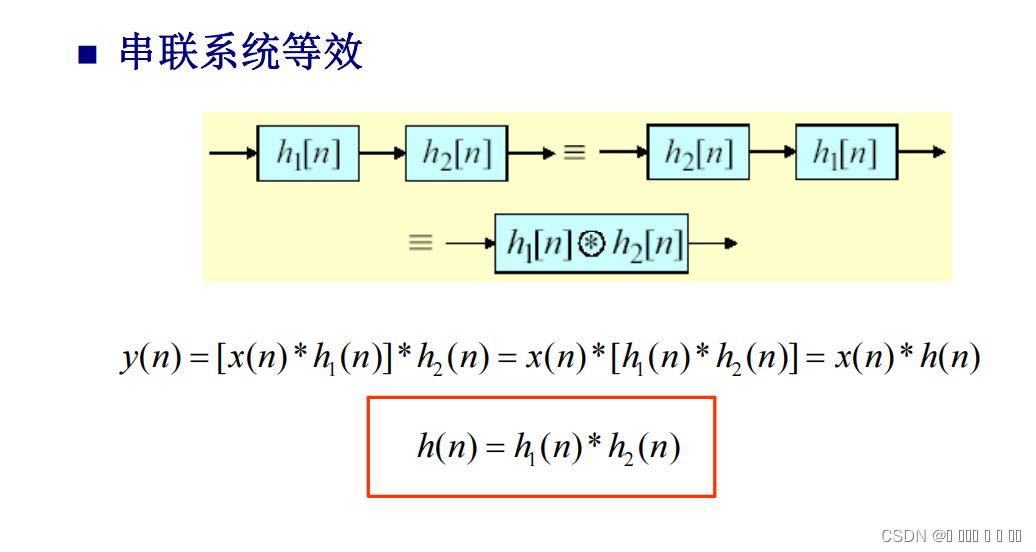
x(n)∗[h1(n)∗h2(n)]=[x(n)∗h1(n)]∗h2(n)
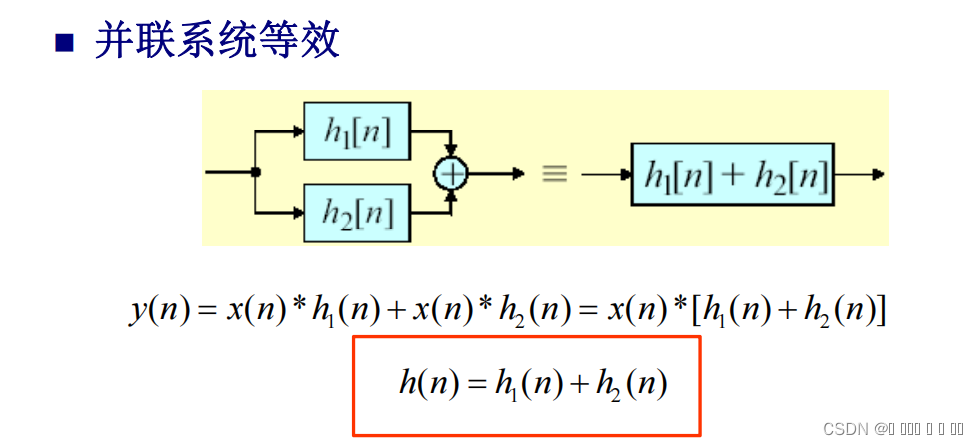
x(n)∗[h1(n)+h2(n)]=x(n)∗h1(n)+x(n)∗h2(n)
时域离散系统的输入输出描述法——线性常系数差分方程
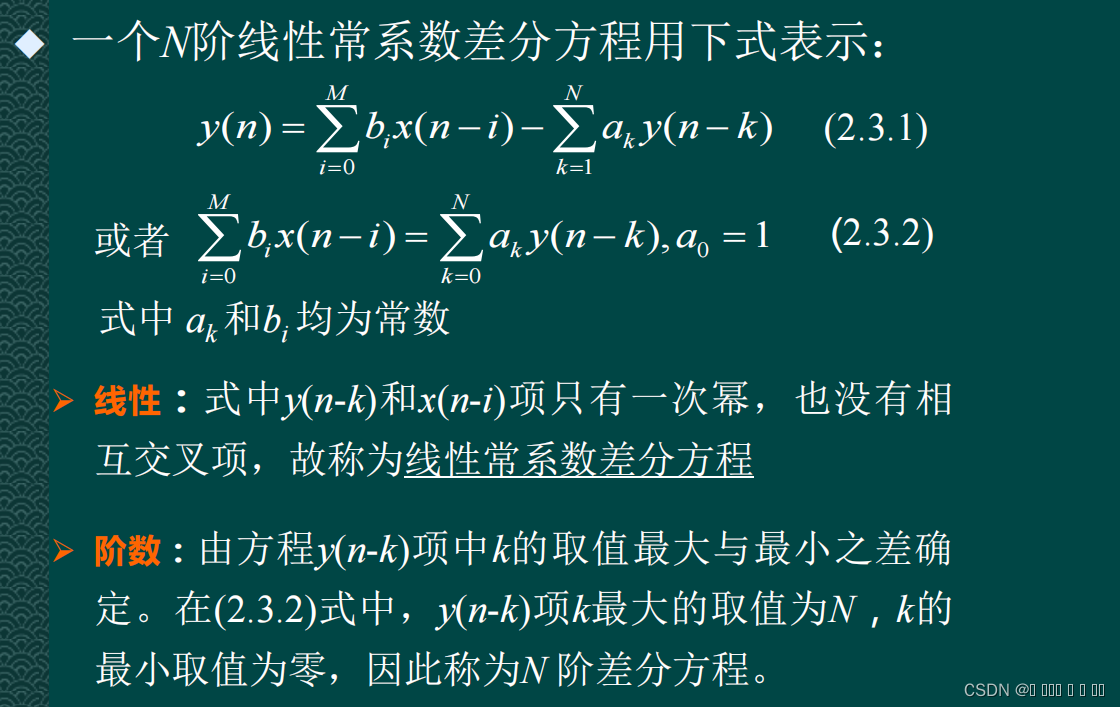
线性常系数差分方程
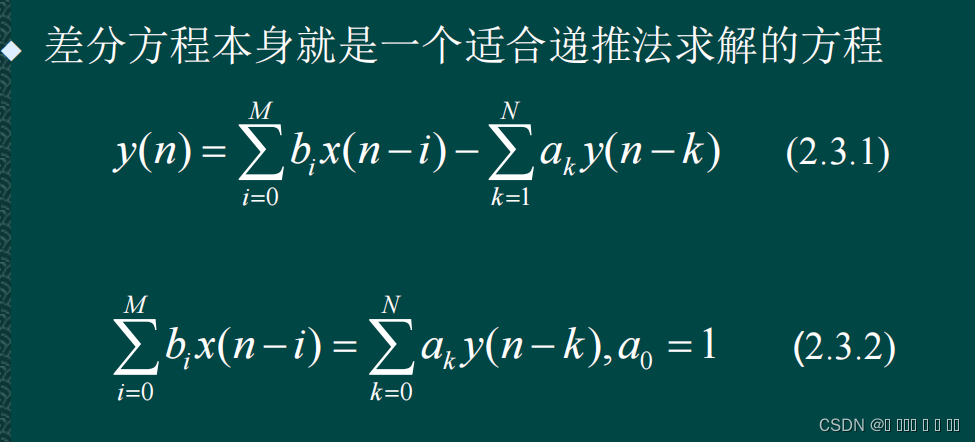
线性常系数差分方程的递推解法
想法:根据初始条件求出 y(0)(,y(1),⋯),并通过递推给出任意 n 值的系统输出。
其他解法——微分方程,z域变换
滑动平均滤波器
本章介绍了一种简单的滤波器,作用是通过接收时刻 n 开始的,时长为 Δn 的输入信号,并在时刻 n+Δn 输出从 n 到 n+Δn 时刻的算术平均值,即y(n)=∑i=0Δn−1x(n−i).
从信号角度看,滑动平均滤波器起到了对快速变化的信号进行平滑处理的作用。
补充:





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











