







局部特征
-
全局特征会面临难以克服的困难
- 遮挡,形变,环境

- 遮挡,形变,环境
特征检测
目标:
-
稳定检测(如果两次检测出的特征点差别很大,无法进行匹配)

-
易于匹配

挑战 -
对图像几何变换的稳定性
-
对颜色,光照变化的稳定性
需求
- 区域提取需要是可重复的和准确的
- 不受平移,旋转,大小的影响
- 不受仿射变换的影响
- 对光照变化、噪音、模糊、量有很好的适应性
- 局部性:特征是局部的,应该对遮挡和杂乱具有鲁棒性
- 数量:需要足够数量的区域来覆盖该物体
- 区别性:这些区域应该包含有趣的结构
- 效率:接近实时
角点检测
角点的概念
- 平坦区域:各方向都没有变化
- 边:单方向有变化
- 角点:各方向都有变化

Harris角点检测
在角点处,沿任意方向运动都会引起像素颜色的明显变化
等价于:在角点附近,图像梯度具有至少两个主方向
-
数学模型:若窗口发生小位移移动 u u u , v v v , 计算窗口内像素变化
-
w ( x , y ) w(x,y) w(x,y)是权重,可以设置窗口内所有位置的权重都为1,也可以利用高斯函数(角点中心的点的贡献更大)
-
I ( x + u , y + v ) I(x+u,y+v) I(x+u,y+v) 为位置 x , y x,y x,y 移动后位置的像素值
-
I ( x , y ) I(x,y) I(x,y)为位置 x , y x,y x,y 位置的像素值

-
将上式进行泰勒展开,可以得到如下形式

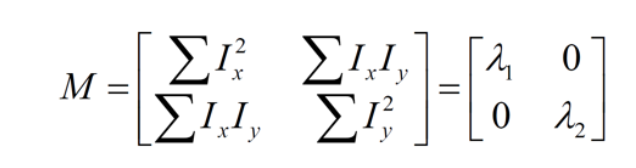
M M M 是一个 2 * 2的矩阵,元素是图像梯度-
I x I_x Ix 是 x x x 方向的梯度
-
I y I_y Iy 是 y y y 方向的梯度

-
若角点是与坐标轴对齐的,则每个点的梯度是与 x x x 轴平行或 与 y y y 轴平行的。
如果两个 λ \lambda λ 都接近 0,则不是角点。角点位置的两个 λ \lambda λ 应该都比较大
-
若角点不与坐标轴对齐, M M M 是对称的,可分解如下(对称矩阵的性质)
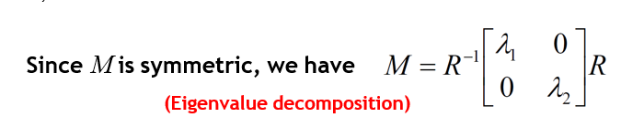
我们可以把M想象成一个椭圆,其轴线长度由特征值决定,方向由R决定。可以把R看成旋转因子,其不影响两个正交方向的变化分量。经对角化处理后,将两个正交方向的变化分量提取出来,就是 λ1 和 λ2(特征值)。为什么可以想象成椭圆:【特征检测】Harris角点检测中的数学推导_hujingshuang-CSDN博客

当 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都比较大,并且差不多大时,是角点

因为特征值计算起来比较麻烦,所以我们定义了响应函数 R = d e t ( M ) − α t r a c e ( M ) 2 = λ 1 λ 2 − α ( λ 1 + λ 2 ) 2 R = det(M) - \alpha trace(M)^2 = \lambda_1 \lambda_2- \alpha(\lambda_1+\lambda_2)^2 R=det(M)−αtrace(M)2=λ1λ2−α(λ1+λ2)2。角点的 ∣ R ∣ |R| ∣R∣大,平坦区域 ∣ R ∣ |R| ∣R∣小,边缘的 ∣ R ∣ |R| ∣R∣为负值

-
-
光照,几何不变性?
具有旋转不变性和光照不变性,不具有尺度不变性
-
旋转不变性
对于下图,我们用椭圆表示 M。图像旋转后,椭圆旋转了,但是形状没变,因此响应函数 R R R 没变

-
不具有尺度不变性:尺度变化会将角点变成边缘
-
加法变化不变性(整体光照):使用的是梯度
斑点检测
利用图像的 H e s s i a n Hessian Hessian矩阵。想法:在两个正交方向上寻找强梯度。全是二阶导
使用公式
d
e
t
(
H
)
det(H)
det(H),认为
d
e
t
(
H
)
det(H)
det(H) 大的是角点

结果:响应主要在角点处和纹理比较强的区域,但是我们想要检测的是斑点
二阶导关注的是图像像素急剧变化的区域,同样对噪声比较敏感

H
e
s
s
i
o
n
Hession
Hession对光照变化和几何变换的稳定性?
如何实现尺度不变
我们观察物体时,若物体离得近,则看起来又大又清晰。若离得远,则看起来又小又模糊。
进行特征检测时,计算机并不能判断图像中物体的尺度,因此我们使用金字塔来建立一系列不同尺度的图像集
图像的尺度空间是指图像的模糊程度,而非图像的大小。近距离看一个物体和远距离看一个物体,模糊程度是不一样的;从近到远,图像越来越模糊的过程,也是图像的尺度越来越大的过程。
高斯金字塔
高斯核是实现尺度变换的唯一变换核
通过降采样构建高斯金字塔。降采样前需要先对图像进行平滑以避免伪影(信号学知识)

-
构建:每一层都通过对前一层进行平滑和下采样来得到
-
为什么使用高斯?部分原因:
-
高斯 * 高斯 = 另一个高斯
-
G ( σ 1 ) ∗ G ( σ 2 ) = G ( s q r t ( σ 12 + σ 22 ) ) G(\sigma_1) * G(\sigma_2) = G(sqrt(\sigma_{12} + \sigma_{22})) G(σ1)∗G(σ2)=G(sqrt(σ12+σ22))
-
-
高斯滤波是低通滤波,当对图像模糊后,图像中的某些信息进行融合,这些信息中是有冗余信息的
因此没有必要以完整的原始分辨率来存储平滑的图像。也就是说,我们可以降采样以减少存储空间
拉普拉斯金字塔
通过用大图减去升采样(插值 + 滤波)后的小图得到。实际上进行的是 DOG 的过程(高斯的差分)
-
升采样后的图和原图大小一致,但更模糊,相当于对原图进行滤波得到的。因此两图相减是高斯的差分

-
拉普拉斯图像分解和重建
-
拉普拉斯图像融合
实现尺度不变
在不同尺度同时进行检测与匹配
暴力
利用多个size的检测框对图像进行扫描
缺点:
- 计算效率低下
- 效率低下,但可用于匹配
- 对大型数据库的检索来说是不可能的
- 不利于识别

自动尺寸选择
思想:针对检测区域设计一个尺度不变的函数(不管尺寸是怎样的,只要包含的内容一样,值就一样)
方法:
-
取函数的局部最大值
为什么我们这里要找最大值呢?
原因:进行特征检测时,我们往往定义一个指标,并判断这个指标最大值对应的区域为特征点
-
最大值对应的区域对图像尺寸来说是不变的
图像尺寸变为 1/2 ,则最大响应值对应的区域大小也是 1/2
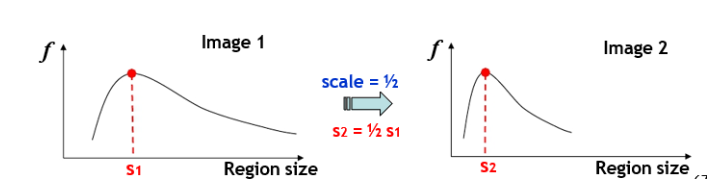

归一化:区域大小变换到固定的尺寸
什么样的函数是有效的呢?
LOG:LOG的不同
σ
\sigma
σ 影响着其检测框的scale。
σ
\sigma
σ 越大,scale越大(因此可以使用不同
σ
\sigma
σ 的 LOG 来进行不同尺寸的特征检测)

我们记录 interest points:LOG尺度空间上的局部最大值对应的位置
实际使用时,我们常使用DOG来近似代替LOG,因为这样更方便计算

- 流程
- 在尺度空间上检测 DOG 的局部最大值
- 非极大值抑制
- 消除边缘响应(由于某些原因,在检测极值点时,边缘容易被检测出来)
















 2816
2816











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











