







一.相关资料
- 论文地址:[2204.10137] Toward Fast, Flexible, and Robust Low-Light Image Enhancement
- SCI源码:https://github.com/vis-opt-group/SCI
二.sci简介
现有的弱光图像增强技术不仅难以兼顾视觉质量和计算效率,而且在未知的复杂场景下往往失效。本文提出了一种新的自校准光照(SCI)学习框架,用于在真实的弱光环境中快速、灵活、鲁棒地对图像进行增亮处理.具体地说,我们建立了一个具有权重共享的级联光照学习过程来处理这个任务。考虑到级联模式的计算量,我们构造了自校准模块,实现了各级结果的收敛,产生了仅使用单个基本块进行推理的增益(在以前的工作中还没有开发过),从而大大降低了计算量。然后定义了无监督训练损失,以提高模型适应一般场景的能力。在此基础上,对SCI的内在特性(现有研究中所缺乏的),包括操作不敏感的
适应性(在不同通讯作者的背景下获得稳定的表现)进行了全面的探索。很少的简单操作)和与模型无关的通用性(可应用于基于照明的现有工作以提高性能)。最后,大量的实验和烧蚀研究充分表明了我们在质量和效率上的优越性。在微光人脸检测和夜间语义分割等方面的应用充分展示了SCI潜在的实用价值。
上面是论文中的摘要,总结一下特点:1.无监督学习(不需要成对的图片训练) 2.轻量级(速度很快)
三.主要贡献
1.考虑到级联模式的计算量,我们构造了自校准模块,实现了各级结果的收敛,产生了仅使用单个基本块进行推理的增益。(结构新,后面结合代码解释)
2.定义了无监督训练损失,以提高模型适应一般场景的能力。
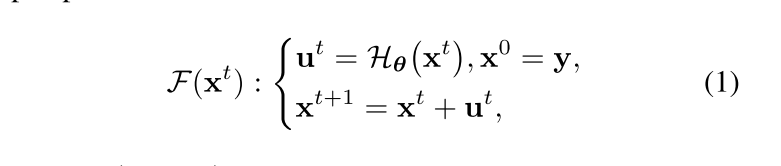
四.SCI网络结构
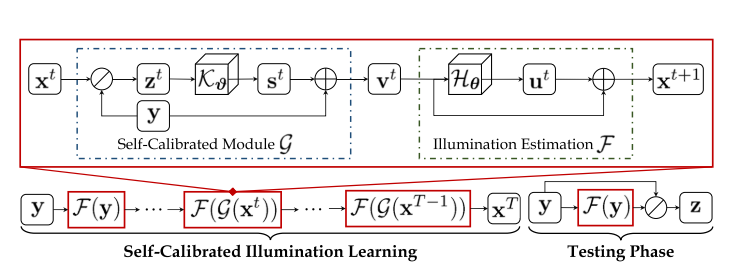
整个网络由校准网络和增强网络构成
1.权重共享照明学习(代码中EhanceNetwork)
看看代码:
class EnhanceNetwork(nn.Module):
def __init__(self, layers, channels):
super(EnhanceNetwork, self).__init__()
kernel_size = 3
dilation = 1
padding = int((kernel_size - 1) / 2) * dilation
self.in_conv = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),
nn.ReLU()
)
self.conv = nn.Sequential(
nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),
nn.BatchNorm2d(channels),
nn.ReLU()
)
self.blocks = nn.ModuleList()
for i in range(layers):
self.blocks.append(self.conv)
self.out_conv = nn.Sequential(
nn.Conv2d(in_channels=channels, out_channels=3, kernel_size=3, stride=1, padding=1),
nn.Sigmoid()
)
def forward(self, input):
fea = self.in_conv(input)
for conv in self.blocks:
fea = fea + conv(fea)
fea = self.out_conv(fea)
illu = fea + input
illu = torch.clamp(illu, 0.0001, 1)
return illu
这个网络很精炼,简单的残差结构,普通的卷积操作,以最精炼的结构提取更多的特征,Sigmoid()限制输出范围(0-1),看完代码大家可能有一个疑问,并没有体现它的阶段性,公式中的t阶段在哪里呢?别急,我们继续往下看。
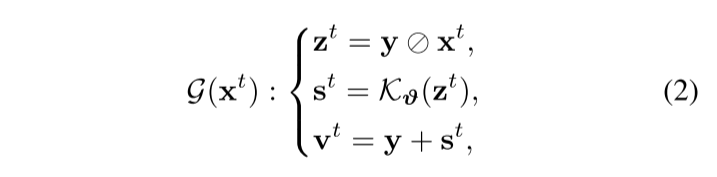
2.自校准模块(代码中CalibrateNetwork)
同样也是看看代码:
class CalibrateNetwork(nn.Module):
def __init__(self, layers, channels):
super(CalibrateNetwork, self).__init__()
kernel_size = 3
dilation = 1
padding = int((kernel_size - 1) / 2) * dilation
self.layers = layers
self.in_conv = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),
nn.BatchNorm2d(channels),
nn.ReLU()
)
self.convs = nn.Sequential(
nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),
nn.BatchNorm2d(channels),
nn.ReLU(),
nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),
nn.BatchNorm2d(channels),
nn.ReLU()
)
self.blocks = nn.ModuleList()
for i in range(layers):
self.blocks.append(self.convs)
self.out_conv = nn.Sequential(
nn.Conv2d(in_channels=channels, out_channels=3, kernel_size=3, stride=1, padding=1),
nn.Sigmoid()
)
def forward(self, input):
fea = self.in_conv(input)
for conv in self.blocks:
fea = fea + conv(fea)
fea = self.out_conv(fea)
delta = input - fea
return delta网络同样很精炼,简单的残差结构,普通的卷积操作,比上个模块多一层卷积和归一化,
nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),
nn.BatchNorm2d(channels),
以最精炼的结构提取更多的特征,Sigmoid()限制输出范围(0-1),同样公式中的t阶段在哪里呢?别急,我们继续往下看。
3.总体网络
class Network(nn.Module):
def __init__(self, stage=3):
super(Network, self).__init__()
self.stage = stage
self.enhance = EnhanceNetwork(layers=1, channels=3)
self.calibrate = CalibrateNetwork(layers=3, channels=16)
self._criterion = LossFunction()
def weights_init(self, m):
if isinstance(m, nn.Conv2d):
m.weight.data.normal_(0, 0.02)
m.bias.data.zero_()
if isinstance(m, nn.BatchNorm2d):
m.weight.data.normal_(1., 0.02)
def forward(self, input):
ilist, rlist, inlist, attlist = [], [], [], []
input_op = input
for i in range(self.stage):
inlist.append(input_op)
i = self.enhance(input_op)
r = input / i
r = torch.clamp(r, 0, 1)
att = self.calibrate(r)
input_op = input + att
ilist.append(i)
rlist.append(r)
attlist.append(torch.abs(att))
return ilist, rlist, inlist, attlist
def _loss(self, input):
i_list, en_list, in_list, _ = self(input)
loss = 0
for i in range(self.stage):
loss += self._criterion(in_list[i], i_list[i])
return loss
这里我们注意stage=3,这里就是对应的阶段,源代码中为3,也就是将网络重复三次。这里还可以发现上一阶段的EhanceNetwork的结果与当前阶段的结果的比值为CalibrateNetwork的输入,用比值去校准。
4.损失函数(无监督损失训练)
Lf :表示保真度;Ls :表示平滑损失
(1)保真度
![]()
上程序:
Fidelity_Loss = self.l2_loss(illu, input)就是MSE损失目的每个阶段输入之间的像素级一致性,防止图片失去原有纹理。
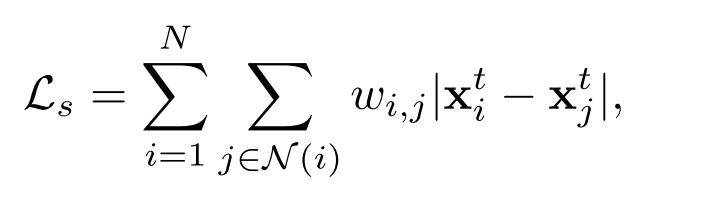
(2)平滑损失
上代码:
class SmoothLoss(nn.Module):
def __init__(self):
super(SmoothLoss, self).__init__()
self.sigma = 10
def rgb2yCbCr(self, input_im):
im_flat = input_im.contiguous().view(-1, 3).float()
mat = torch.Tensor([[0.257, -0.148, 0.439], [0.564, -0.291, -0.368], [0.098, 0.439, -0.071]]).cuda()
bias = torch.Tensor([16.0 / 255.0, 128.0 / 255.0, 128.0 / 255.0]).cuda()
temp = im_flat.mm(mat) + bias
out = temp.view(input_im.shape[0], 3, input_im.shape[2], input_im.shape[3])
return out
# output: output input:input
def forward(self, input, output):
self.output = output
self.input = self.rgb2yCbCr(input)
sigma_color = -1.0 / (2 * self.sigma * self.sigma)
w1 = torch.exp(torch.sum(torch.pow(self.input[:, :, 1:, :] - self.input[:, :, :-1, :], 2), dim=1,
keepdim=True) * sigma_color)
w2 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-1, :] - self.input[:, :, 1:, :], 2), dim=1,
keepdim=True) * sigma_color)
w3 = torch.exp(torch.sum(torch.pow(self.input[:, :, :, 1:] - self.input[:, :, :, :-1], 2), dim=1,
keepdim=True) * sigma_color)
w4 = torch.exp(torch.sum(torch.pow(self.input[:, :, :, :-1] - self.input[:, :, :, 1:], 2), dim=1,
keepdim=True) * sigma_color)
w5 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-1, :-1] - self.input[:, :, 1:, 1:], 2), dim=1,
keepdim=True) * sigma_color)
w6 = torch.exp(torch.sum(torch.pow(self.input[:, :, 1:, 1:] - self.input[:, :, :-1, :-1], 2), dim=1,
keepdim=True) * sigma_color)
w7 = torch.exp(torch.sum(torch.pow(self.input[:, :, 1:, :-1] - self.input[:, :, :-1, 1:], 2), dim=1,
keepdim=True) * sigma_color)
w8 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-1, 1:] - self.input[:, :, 1:, :-1], 2), dim=1,
keepdim=True) * sigma_color)
w9 = torch.exp(torch.sum(torch.pow(self.input[:, :, 2:, :] - self.input[:, :, :-2, :], 2), dim=1,
keepdim=True) * sigma_color)
w10 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-2, :] - self.input[:, :, 2:, :], 2), dim=1,
keepdim=True) * sigma_color)
w11 = torch.exp(torch.sum(torch.pow(self.input[:, :, :, 2:] - self.input[:, :, :, :-2], 2), dim=1,
keepdim=True) * sigma_color)
w12 = torch.exp(torch.sum(torch.pow(self.input[:, :, :, :-2] - self.input[:, :, :, 2:], 2), dim=1,
keepdim=True) * sigma_color)
w13 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-2, :-1] - self.input[:, :, 2:, 1:], 2), dim=1,
keepdim=True) * sigma_color)
w14 = torch.exp(torch.sum(torch.pow(self.input[:, :, 2:, 1:] - self.input[:, :, :-2, :-1], 2), dim=1,
keepdim=True) * sigma_color)
w15 = torch.exp(torch.sum(torch.pow(self.input[:, :, 2:, :-1] - self.input[:, :, :-2, 1:], 2), dim=1,
keepdim=True) * sigma_color)
w16 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-2, 1:] - self.input[:, :, 2:, :-1], 2), dim=1,
keepdim=True) * sigma_color)
w17 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-1, :-2] - self.input[:, :, 1:, 2:], 2), dim=1,
keepdim=True) * sigma_color)
w18 = torch.exp(torch.sum(torch.pow(self.input[:, :, 1:, 2:] - self.input[:, :, :-1, :-2], 2), dim=1,
keepdim=True) * sigma_color)
w19 = torch.exp(torch.sum(torch.pow(self.input[:, :, 1:, :-2] - self.input[:, :, :-1, 2:], 2), dim=1,
keepdim=True) * sigma_color)
w20 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-1, 2:] - self.input[:, :, 1:, :-2], 2), dim=1,
keepdim=True) * sigma_color)
w21 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-2, :-2] - self.input[:, :, 2:, 2:], 2), dim=1,
keepdim=True) * sigma_color)
w22 = torch.exp(torch.sum(torch.pow(self.input[:, :, 2:, 2:] - self.input[:, :, :-2, :-2], 2), dim=1,
keepdim=True) * sigma_color)
w23 = torch.exp(torch.sum(torch.pow(self.input[:, :, 2:, :-2] - self.input[:, :, :-2, 2:], 2), dim=1,
keepdim=True) * sigma_color)
w24 = torch.exp(torch.sum(torch.pow(self.input[:, :, :-2, 2:] - self.input[:, :, 2:, :-2], 2), dim=1,
keepdim=True) * sigma_color)
p = 1.0
pixel_grad1 = w1 * torch.norm((self.output[:, :, 1:, :] - self.output[:, :, :-1, :]), p, dim=1, keepdim=True)
pixel_grad2 = w2 * torch.norm((self.output[:, :, :-1, :] - self.output[:, :, 1:, :]), p, dim=1, keepdim=True)
pixel_grad3 = w3 * torch.norm((self.output[:, :, :, 1:] - self.output[:, :, :, :-1]), p, dim=1, keepdim=True)
pixel_grad4 = w4 * torch.norm((self.output[:, :, :, :-1] - self.output[:, :, :, 1:]), p, dim=1, keepdim=True)
pixel_grad5 = w5 * torch.norm((self.output[:, :, :-1, :-1] - self.output[:, :, 1:, 1:]), p, dim=1, keepdim=True)
pixel_grad6 = w6 * torch.norm((self.output[:, :, 1:, 1:] - self.output[:, :, :-1, :-1]), p, dim=1, keepdim=True)
pixel_grad7 = w7 * torch.norm((self.output[:, :, 1:, :-1] - self.output[:, :, :-1, 1:]), p, dim=1, keepdim=True)
pixel_grad8 = w8 * torch.norm((self.output[:, :, :-1, 1:] - self.output[:, :, 1:, :-1]), p, dim=1, keepdim=True)
pixel_grad9 = w9 * torch.norm((self.output[:, :, 2:, :] - self.output[:, :, :-2, :]), p, dim=1, keepdim=True)
pixel_grad10 = w10 * torch.norm((self.output[:, :, :-2, :] - self.output[:, :, 2:, :]), p, dim=1, keepdim=True)
pixel_grad11 = w11 * torch.norm((self.output[:, :, :, 2:] - self.output[:, :, :, :-2]), p, dim=1, keepdim=True)
pixel_grad12 = w12 * torch.norm((self.output[:, :, :, :-2] - self.output[:, :, :, 2:]), p, dim=1, keepdim=True)
pixel_grad13 = w13 * torch.norm((self.output[:, :, :-2, :-1] - self.output[:, :, 2:, 1:]), p, dim=1, keepdim=True)
pixel_grad14 = w14 * torch.norm((self.output[:, :, 2:, 1:] - self.output[:, :, :-2, :-1]), p, dim=1, keepdim=True)
pixel_grad15 = w15 * torch.norm((self.output[:, :, 2:, :-1] - self.output[:, :, :-2, 1:]), p, dim=1, keepdim=True)
pixel_grad16 = w16 * torch.norm((self.output[:, :, :-2, 1:] - self.output[:, :, 2:, :-1]), p, dim=1, keepdim=True)
pixel_grad17 = w17 * torch.norm((self.output[:, :, :-1, :-2] - self.output[:, :, 1:, 2:]), p, dim=1, keepdim=True)
pixel_grad18 = w18 * torch.norm((self.output[:, :, 1:, 2:] - self.output[:, :, :-1, :-2]), p, dim=1, keepdim=True)
pixel_grad19 = w19 * torch.norm((self.output[:, :, 1:, :-2] - self.output[:, :, :-1, 2:]), p, dim=1, keepdim=True)
pixel_grad20 = w20 * torch.norm((self.output[:, :, :-1, 2:] - self.output[:, :, 1:, :-2]), p, dim=1, keepdim=True)
pixel_grad21 = w21 * torch.norm((self.output[:, :, :-2, :-2] - self.output[:, :, 2:, 2:]), p, dim=1, keepdim=True)
pixel_grad22 = w22 * torch.norm((self.output[:, :, 2:, 2:] - self.output[:, :, :-2, :-2]), p, dim=1, keepdim=True)
pixel_grad23 = w23 * torch.norm((self.output[:, :, 2:, :-2] - self.output[:, :, :-2, 2:]), p, dim=1, keepdim=True)
pixel_grad24 = w24 * torch.norm((self.output[:, :, :-2, 2:] - self.output[:, :, 2:, :-2]), p, dim=1, keepdim=True)
ReguTerm1 = torch.mean(pixel_grad1) \
+ torch.mean(pixel_grad2) \
+ torch.mean(pixel_grad3) \
+ torch.mean(pixel_grad4) \
+ torch.mean(pixel_grad5) \
+ torch.mean(pixel_grad6) \
+ torch.mean(pixel_grad7) \
+ torch.mean(pixel_grad8) \
+ torch.mean(pixel_grad9) \
+ torch.mean(pixel_grad10) \
+ torch.mean(pixel_grad11) \
+ torch.mean(pixel_grad12) \
+ torch.mean(pixel_grad13) \
+ torch.mean(pixel_grad14) \
+ torch.mean(pixel_grad15) \
+ torch.mean(pixel_grad16) \
+ torch.mean(pixel_grad17) \
+ torch.mean(pixel_grad18) \
+ torch.mean(pixel_grad19) \
+ torch.mean(pixel_grad20) \
+ torch.mean(pixel_grad21) \
+ torch.mean(pixel_grad22) \
+ torch.mean(pixel_grad23) \
+ torch.mean(pixel_grad24)
total_term = ReguTerm1
return total_term有点长,但是基本都在重发一个事,那就是算相邻点的梯度,它先将输入图像从 RGB 色彩空间转换为 YCbCr 色彩空间,接着计算输出图像在不同方向(水平、垂直、对角线等)上的像素梯度,并利用输入图像的颜色差异生成权重,将这些加权后的梯度进行求和,得到正则化项,以此作为损失值,用于引导模型输出更平滑的图像。也就是说图像变化大的区域给予更小的权重从而调节尺度越大,变化小就很平滑了权重小就不怎么去调整。
五.代码复现
通过上面的地址下载源码:
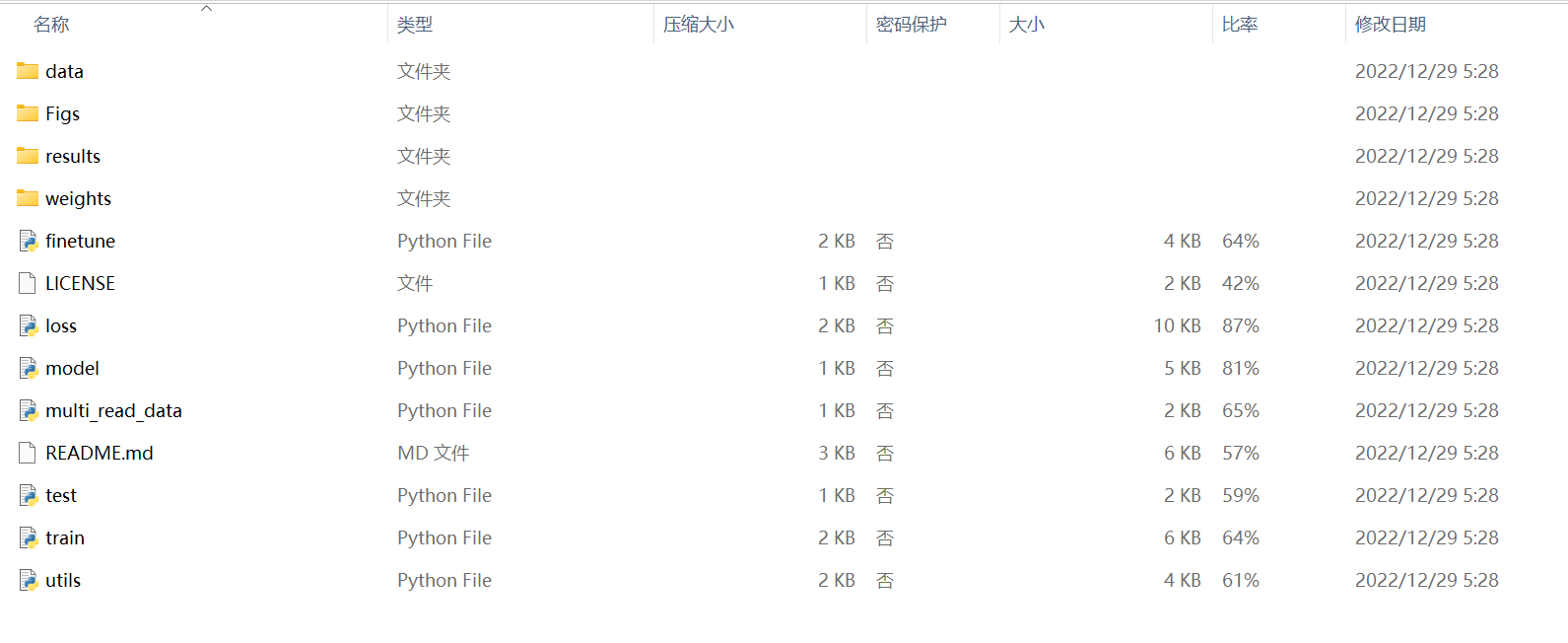
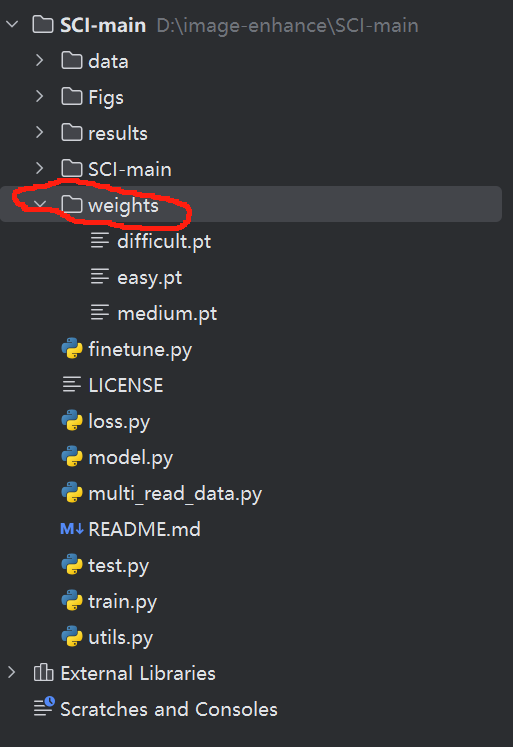 神经网络最重要的权重在这个文件下
神经网络最重要的权重在这个文件下
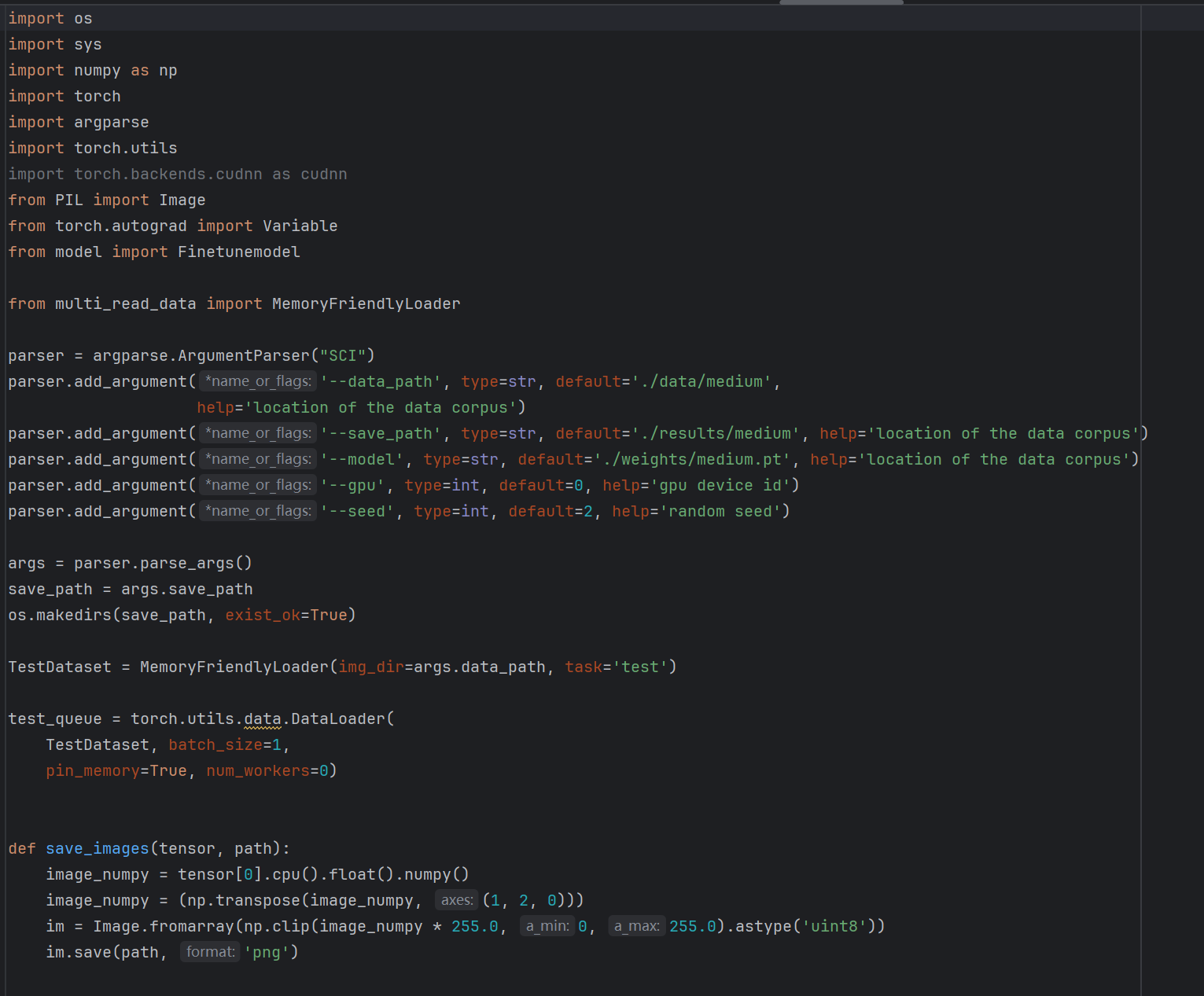
test.py是运行代码,看到Parser。第一行填入暗光图片地址,第二行填入增强图片保存地址第三行是模型地址,weight文件夹中三个权重任意一个地址填入。后面的不管。运行就像可以了。
记得读一读readme。环境配置
六.复现结果





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











