









一、希尔排序介绍
希尔排序( ShellSort )是插入排序的一种,它是针对直接插入排序算法的改进。该方法又称缩小增量排序,因 DL .Shell 于1959年提出而得名。
希尔排序实质上是一种分组插入方法。它的基本思想是:对于 n 个待排序的数列,取一个小于 n 的整数 gap ( gap 被称为步长)将待排序元素分成若干个组子序列,所有距离为 gap 的倍数的记录放在同个一组中;然后,对各组内的元素进行直接插入排序。这一趟排序完成之后,每一个组的元素都是有序的。然后减小 gap 的值,并重复执行上述的分组和排序。重复这样的操作,当 gap =1时,整个数列就是有序的。
二、希尔排序图文说明
1. 希尔排序代码(一)
#define _CRT_SECURE_NO_WARNINGS 1
#include <stdio.h>
// 参数说明:
// a -- 待排序的数组
// n -- 数组的长度
void shell_sort1(int a[], int n) {
int i, j, gap;
// gap为步长,每次减为原来的一半。
for (gap = n / 2; gap > 0; gap /= 2) {
// 共gap个数组,对每一组都执行直接插入排序
for (i = 0; i < gap; i++) {
for (j = i + gap; j < n; j += gap) {
// 如果a[j]<a[j-gap],则寻找a[j]位置,并将后面的位置都后移。
if (a[j] < a[j - gap]) {
int tmp = a[j];
int k = j - gap;
while (k >= 0 && a[k] > tmp) {
a[k + gap] = a[k];
k -= gap;
}
a[k + gap] = tmp;
}
}
}
}
}
int main() {
int arr[] = { 9,5,1,6,2,3,0,4,8,7 };
shell_sort1(arr, 10);
for (int i = 0; i < 10; i++) {
printf("%d ", arr[i]);
}
printf("\n");
return 0;
}在上面的希尔排序中,首先要选取步长 gap 的值。选取了 gap 之后,就将数列分成了 gap 个组,对于每一个组都执行直接插入排序。在排序完所有的组之后,将 gap 的值减半;继续对数列进行分组,然后进行排序。重复这样的操作,直到 gap <0为止。此时,数列也就是有序的了。
为了便于观察,我们将希尔排序中的直接插入排序独立出来,得到代码(二)。
2. 希尔排序代码(二)
#define _CRT_SECURE_NO_WARNINGS 1
#include <stdio.h>
// 对希尔排序中单个数组进行排序
// 参数说明:
// a -- 待排序的数组
// n -- 数组的长度
// i -- 组的起始位置
// gap -- 组的步长
// 组是 从i开始,将相隔gap长度的数都取出 所组成的。
void group_sort(int a[], int n,int i,int gap) {
int j;
for (j = i + gap; j < n; j += gap) {
// 如果a[j] < a[j-gap],则寻找a[j]位置,并将后面数据的位置都后移。
if (a[j] < a[j - gap]) {
int tmp = a[j];
int k = j - gap;
while (k >= 0 && a[k] > tmp) {
a[k + gap] = a[k];
k -= gap;
}
a[k + gap] = tmp;
}
}
}
// 希尔排序
// 参数说明
// a -- 待排序的数组
// n -- 数组的长度
void shell_sort2(int a[], int n) {
int i, gap;
// gap为步长,每次减为原来的一半。
for (gap = n / 2; gap > 0; gap /= 2) {
// 共gap个数组,对每一组进行直接插入排序
for (i = 0; i < gap; i++) {
group_sort(a, n, i, gap);
}
}
}
int main() {
int arr[] = { 9,5,1,6,2,3,0,4,8,7 };
shell_sort2(arr, 10);
for (int i = 0; i < 10; i++) {
printf("%d ", arr[i]);
}
printf("\n");
return 0;
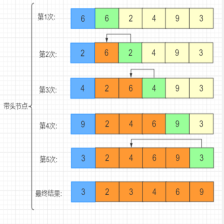
}下面以数列{80,30,60,40,20,10,50,70}为例,演示它的希尔排序过程。
第一趟:(gap = 4)

当 gap=4 时,意味着将数列分为四个组:{80,20},{30,10},{60,50},{40,70}。对应数列:{80,30,60,40,20,10,50,70}
对这4个组分别进行排序,排序结果:{20,80},{10,30},{50,60},{40,70}。对应数列:{20,10,50,40,80,30,60,70}
第二趟:(gap = 2)

当gap = 2 时,意味着将数组分为2个组:{20,50,80,60},{10,40,30,70}。对应数列:{20,10,50,40,80,30,60,70}
注意:
{20,50,80,60}实际上有两个有序的数列{20,80}和{50,60}组成。
{10,40,30,70}实际上有两个有序的数列{10,30}和{40,70}组成。
对这2个组分别进行排序,排序结果:{20,50,60,80},{10,30,40,70}。对应数列:{20,10,50,30,60,40,80,70}
第三趟:(gap = 1)

当gap=1 时,意味着将数列分为1个组:{20,10,50,30,60,40,80,70}
注意:{20,10,50,30,60,40,80,70} 实际上有两个有序的数列 {20,50,60,80} 和 {10,30,40,70}组成。
对这1个组分别进行排序,排序结果:{10,20,30,40,50,60,70,80}
三、希尔排序的时间复杂度和稳定性
1. 希尔排序的时间复杂度
希尔排序的时间复杂度与增量(即,步长 gap )的选取有关。
例如,当增量为1时,希尔排序退化成了直接插入排序,此时的时间复杂度为O(N^2),而 Hibbard增量的希尔排序的时间复杂度为O (N^(3/2))。
2. 希尔排序的稳定性
希尔排序是不稳定的算法,它不满足稳定算法的定义。对于相同的两个数,可能由于分在不同的中而导致它们的顺序发生变化。
算法稳定性:假设在数列中存在 a [ i ]= a[ j ] ,若在排序之前, a [ i ]在 a [ j ]前面;并且排序之后, a [ i ]仍在 a[ j ]前面。则这个排序算法是稳定的!















 623
623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









