







# 图论
图论算法可以说是在数据结构中有着极其重要的存在,它的算法都不难理解,主要是如何去存储这个图结构
图结构
通常采用二维数组的方式存储
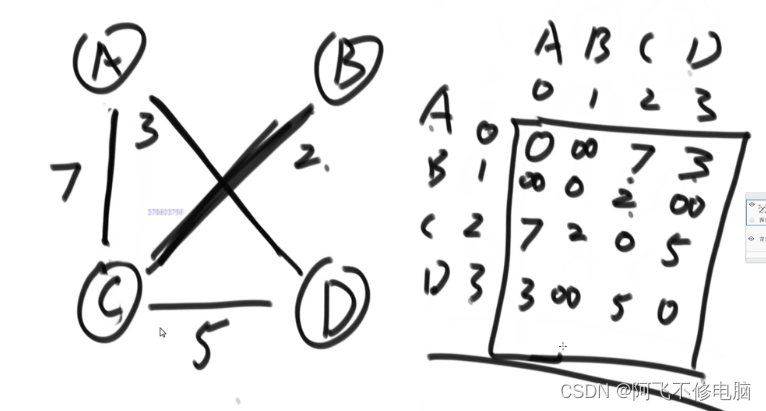
也可以采用一维数组存储
代码表示如下
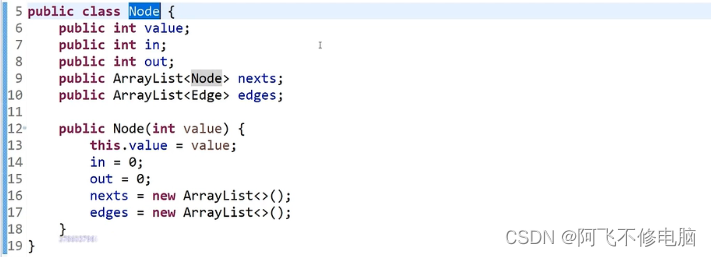
点集
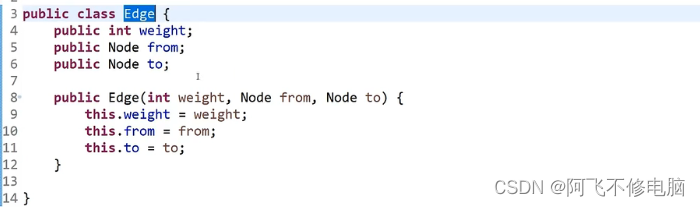
边集
经典算法
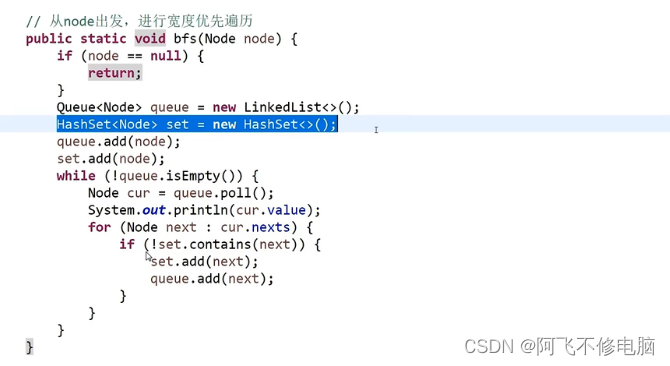
BFS(宽度优先遍历)
BFS也称宽度优先遍历,即一层一层的遍历,相对于DFS(深度优先遍历),用到了队列的结构。宽度优先搜索算法(又称广度优先搜索)是最简便的图的搜索算法之一,这一算法也是很多重要的图的算法的原型。Dijkstra单源最短路径算法和Prim最小生成树算法都采用了和宽度优先搜索类似的思想。其别名又叫BFS,属于一种盲目搜寻法,目的是系统地展开并检查图中的所有节点,以找寻结果。换句话说,它并不考虑结果的可能位置,彻底地搜索整张图,直到找到结果为止。


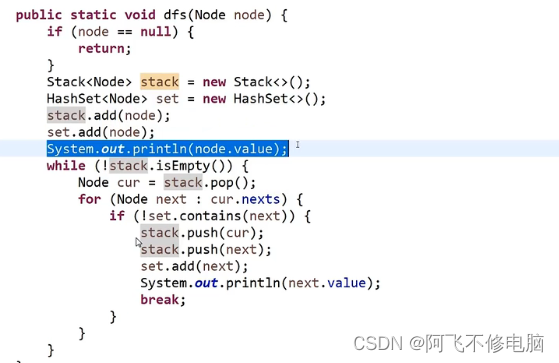
DFS(深度优先便利)
DFS也称深度优先遍历,就是一条路走到黑,遇到能走的就一直走
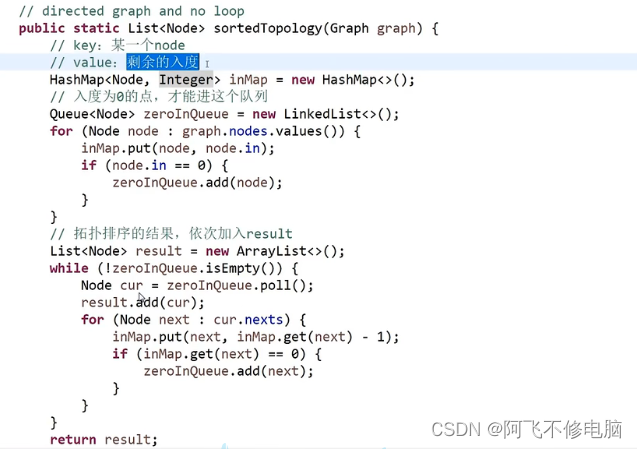
拓扑排序
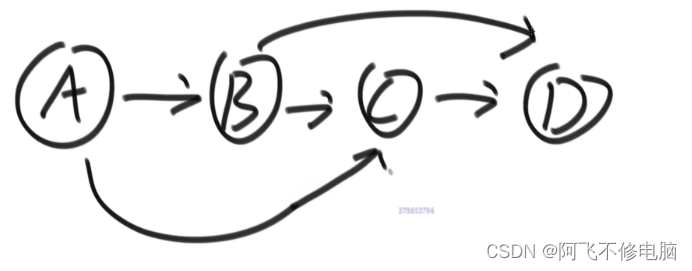
拓扑排序就是每一步都要由上一步作为条件,才能走到下一步,适合用于工程算法
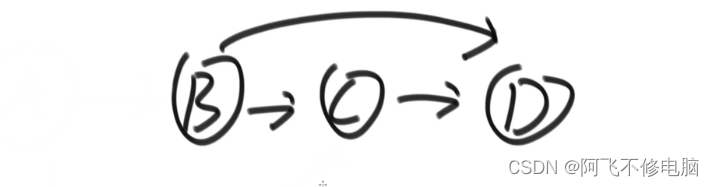
如下图,走到B必须完成A,算法的关键:完成一步,把完成的节点删除掉,并且把和这个节点有关的依赖都删掉,例如:删掉A,把关于A的依赖都删除掉
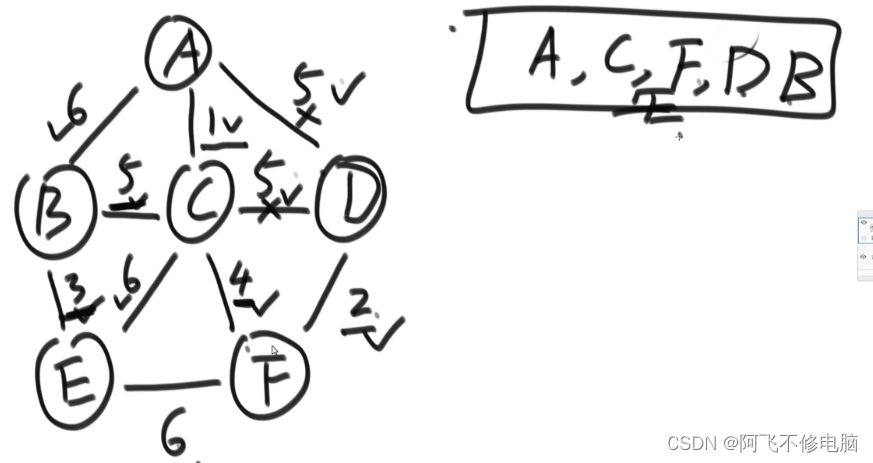
克鲁斯卡尔算法(Kruskal)
用于最小生成树(就是边权最小的树)的算法,也称K算法(适用于无向图)
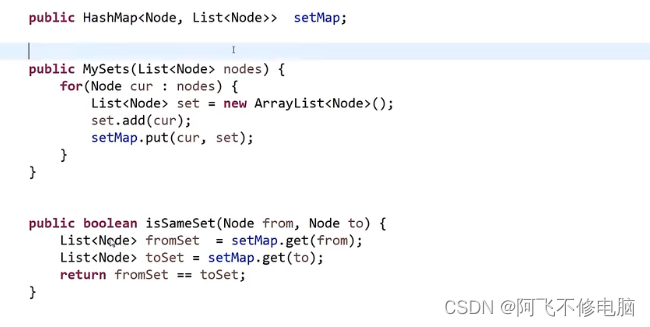
- setMap用于存储一个点的信息,包括该点和该点连接下一节点的集合
- isSameSet用于判断fromSet和toSet是不是来自一个集合,用于判断会不会形成环
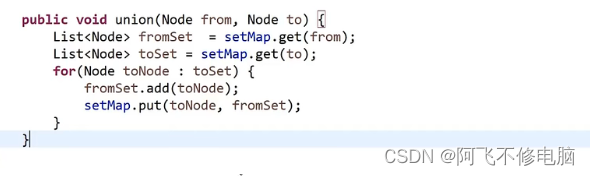
- union用于合并from和to
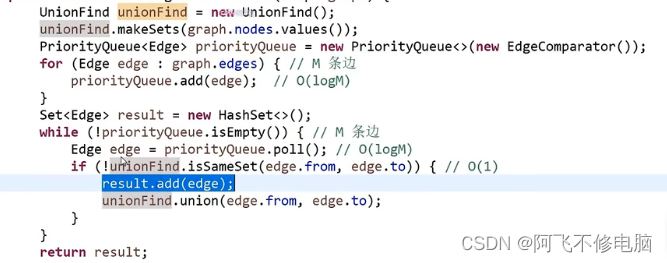
K算法主函数
//(无向图)k算法:从边角度出发,依次选择最小的边,如果加上这条边会形成环,则不加这条边,如果不会形成环,则加上这条边
//怎么判断会不会形成环,关键在于isSameSet函数,如果在一个集合中就会形成环
public static class MySets{
//key=节点 value=节点当前所在的集合
public HashMap<Node, List<Node>> setMap;
public MySets(List<Node> nodes){
for(Node cur : nodes){
List<Node> set = new ArrayList<Node>();
set.add(cur);
setMap.put(cur,set);
}
}
//判断两个节点是否在同一个集合
public boolean isSameSet(Node from,Node to){
List<Node> fromSet = setMap.get(from);
List<Node> toSet = setMap.get(to);
return fromSet == toSet;
}
//将两个节点加在同一个集合里
public void union(Node from,Node to){
List<Node> fromSet = setMap.get(from);
List<Node> toSet = setMap.get(to);
//遍历to节点所在集合里的所有元素
for(Node toNode : toSet){
//from节点所在的集合加入to节点所在集合的元素
fromSet.add(toNode);
//在setmap里更新这些节点当前所在的集合
setMap.put(toNode,fromSet);
}
}
//比较器
public static class EdgeComparator implements Comparator<Edge> {
@Override
public int compara(Edge o1,Edge o2){
return o1.weight-o2.weight;
}
}
//k算法
public static Set<Edge> kruskalMST(Graph graph){
//将图里的点集放进mysets结果初始化,每个节点就是一个集合
MySets mysets = new MySets(graph.nodes.values());
//优先级队列
PriorityQueue<Edge> priorityQueue = new PriorityQueue<>(new EdgeComparator());
//把图里的边集中所有边放进优先级队列里按weight权值从小到大排序
for(Edge edge : graph.edges){
priorityQueue.add(edge);
}
Set<Edge> result = new HashSet<>();
while(!priorityQueue.isEmpty()){
//队列每次弹出最小边
Edge edge = priorityQueue.poll();
//如果边的from和to不在一个集合就:
if(!mysets.isSameSet(edge.from,edge.to)){
//结果集里加入这条边
result.add(edge);
//将边的to点所在集合里的点放进from点所在的集合里
mysets.union(edge.from,edge.to);
}
}
return result;
}
}
下面是并查集版本
P算法(Prim算法)
P算法也称Prim算法,每次迭代选择代价最小的边对应的点,加入到最小生成树中。算法从某一个顶点s开始,逐渐长大覆盖整个连通网的所有顶点。
//(无向图)p算法:从一个点出发,从他的边集里解锁边,再从这些边里挑选权值最小的边,然后解锁下一个节点,再从边集里解锁并挑选权值最小的边(包括之前解锁的边),如果边的to点是已经解锁的节点,则不要这条边,然后重复上述过程,最后形成最小生成树
//比较器
public static class EdgeComparator implements Comparator<Edge>{
@Override
public int compara(Edge o1,Edge o2){
return o1.weight-o2.weight;
}
}
public static Set<Edge> primMST(Graph graph){
//解锁的所有边都放进小根堆排序
PriorityQueue<Edge> priortyQueue = new PriorityQueue<>(new
EdgeComparator());
//解锁过的点都放进set集里
HashSet<Node> set = new HashSet<>();
//选择后的边都放进result里
Set<Edge> result = new HashSet<>();
//遍历所有点集是要防止森林的情况,每一次从一个点出发只会形成一棵树
for(Node node : graph.nodes.values()){
if(!set.contains(node)){
//将解锁了的node放进set里记录
set.add(node);
//将node属于的所有边放进优先级队列里排序
for(Edge edge : node.edges){
priorityQueue.add(edge);
}
while(!priorityQueue.isEmpty()){
//从优先级队列里弹出最小的边
Edge edge = priorityQueue.poll();
//获得node的边的to节点
Node toNode = edge.to;
//如果set里没有to节点,则解锁to节点
if(!set.contains(toNode)){
//将解锁的to节点放到set里
set.add(toNode);
//result集里加入node和to这条最短的边
result.add(edge);
//再将to节点解锁的所有边放进优先级队列,继续根据队列里最小的边解锁下一个节点和其边集
for(Edge nextEdge : toNode.edges){
priorityQueue.add(nextEdge);
}
}
}
}
return result;
}
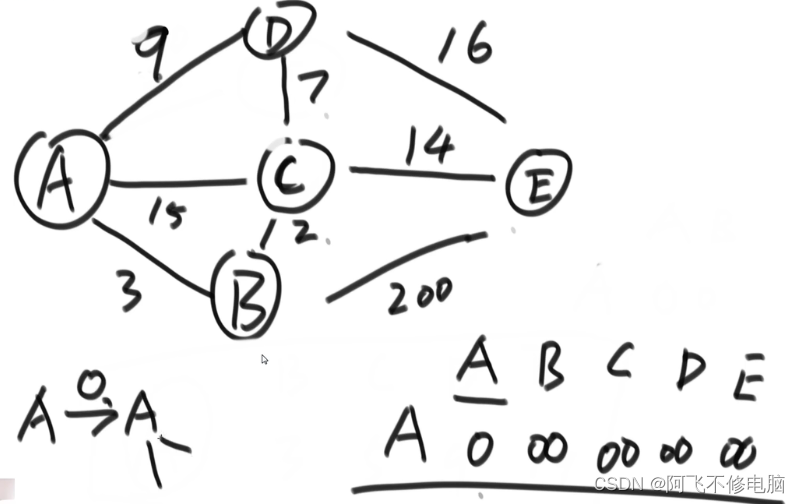
Dijkstra算法
如下图,选A作为出发点,除了A到A距离是0,别的点都设为无穷大,然后找到与A相连的其余节点,根据权重来更新距离,之后选择一个权重最小的边,把A标记上并且封锁,如下图我们可以找到B是权重较小的一个节点,下一次从B开始,循环往复,直到全部的点都封锁
//求从出发节点到其他节点的最短路径
//适用范围:没有累加和为负数的环
public static HashMap<Node,Integer> dijkstra(Node node){
//hashmap表记录从head出发到所有点的最小距离
//key:从head出发到达的点 value:从head出发到达key的最小距离
//如果在hashmap中,没有T的记录,含义是从head到T这个点的距离为∞
HashMap<Node, Integer> distanceMap = new HashMap<>();
distanceMap.put(head,0);
//已经锁住,确定求得最短距离的节点,存在selectedNodes里
HashSet<Node> selectedNodes = new HashSet<>();
//从distanceMap里找没有被锁住并且离head最小距离的节点记录
Node minNode = getMinDistanceAndUnselectedNode(distanceMap, selectedMap);
While(minNode != null){
//先拿到head到minNode的距离
int distance = distanceMap.get(minNode);
//遍历minNode的边集
for(Edge edge : minNode.edges){
//拿到minNode的边的to点
Node toNode = edge.to;
//如果toNode是没有锁住的点
if(!distanceMap.containskey(toNode)){
//在distanceMap里更新to点的信息,距离为head到minNode的距离加上边的weight权值
distanceMap.put(toNode, distance + edge.weight);
}
//如果toNode是已经锁住的点,比较原来的distance和加上权值后的distance,选更小的那个
distanceMap.put(edge.to, Math.min(distanceMap.get(toNode), distance + edge.weight));
}
//更新完minNode的所有路径距离后,将minNode锁住
selectedNodes.add(minNode);
//继续从distanceMap里找一个没有被锁住并且离head最小距离的节点来继续遍历
minNode = getMinDistanceAndUnseletedNode(distanceMap,selectedNodes);
}
return distanceMap;
}
//从距离记录表中寻找一条从head到T的最短距离,且T点是还没有被锁住的,返回T
public static Node getMinDistanceAndUnselectedNode(HashMap<Node,Integer> distanceMap, HashSet<Node> touchedNodes){
//最短距离的节点
Node minNode = null;
//最短距离
int minDistance = Integer.MAx_VALUE;
//遍历距离记录表
for(Entry<Node, Integer> : distanceMap.entrySet()){
//得到每个节点和其当前到head的最短距离
Node node = entry.getKey();
int distance = entry.getValue();
//如果节点还没被锁并且新解锁边的距离小于minDistance
if(!touchedNodes.contains(node) && disatance < minDistance){
//更新最小节点和最小距离
minNode = node;
minDistance = distance;
}
}
return minNode;
}
结语
对以上算法有问题的朋友欢迎在评论区发言,觉得不错还请各位点赞支持















 1795
1795











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









