






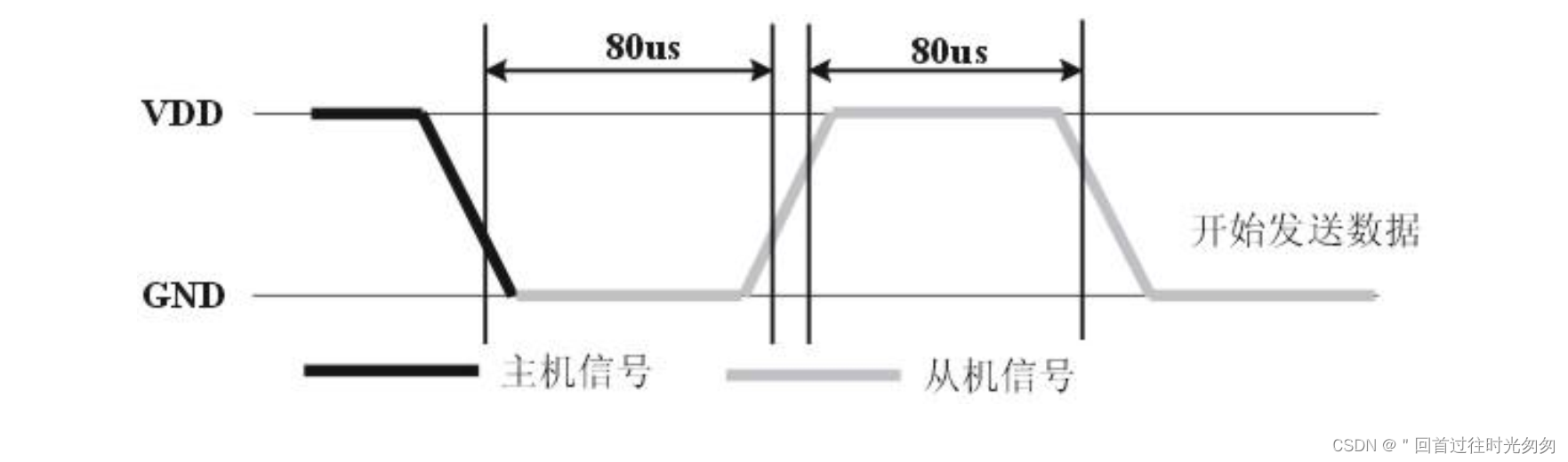
DHT11时序图:




上代码:
dht11.c代码:
#include "dht11\dht11.h"
uint8_t data[5];
void DHT11_PortOutput(void)
{
GPIO_InitTypeDef GPIO_InitTypeDefStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDefStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitTypeDefStruct.GPIO_Pin=GPIO_Pin_2;
GPIO_InitTypeDefStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitTypeDefStruct);
}
void DHT11_PortInput(void)
{
GPIO_InitTypeDef GPIO_InitTypeDefStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDefStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitTypeDefStruct.GPIO_Pin=GPIO_Pin_2;
GPIO_InitTypeDefStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitTypeDefStruct);
}
uint8_t DHT11_Read_Byte(void)
{
uint8_t temp;
uint8_t ReadDat=0;
uint8_t i;
uint8_t retry=0;
for(i=0;i<8;i++)
{
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==0 && retry<100)
{
us_delay(1);
retry++;
}
retry=0;
us_delay(30);
temp=0;
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==1)
{
temp=1;
}
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==1 && retry<100)
{
us_delay(1);
retry++;
}
retry=0;
ReadDat<<=1;
ReadDat|=temp;
}
return ReadDat;
}
uint8_t DHT11_Read(void)
{
uint8_t i;
uint8_t retry=0;
DHT11_PortOutput();
GPIO_ResetBits(GPIOA,GPIO_Pin_2);
ms_delay(18);
GPIO_SetBits(GPIOA,GPIO_Pin_2);
us_delay(40);
DHT11_PortInput();
us_delay(20);
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==0)
{
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==0 && retry<100)
{
us_delay(1);
retry++;
}
retry=0;
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==1 && retry<100)
{
us_delay(1);
retry++;
}
retry=0;
for(i=0;i<5;i++)
{
data[i]=DHT11_Read_Byte();
}
us_delay(50);
}
if((data[0]+data[1]+data[2]+data[3])==data[4])
{
return 1;
}
else
{
return 0;
}
}
dht11.h代码:
#include "main.h"
#include "Systick.h"
extern uint8_t data[5];
void DHT11_PortOutput(void);
void DHT11_PortInput(void);
uint8_t DHT11_Read_Byte(void);
uint8_t DHT11_Read(void);main.c代码
#include "main.h"
#include "led\led.h"
#include "shake\shake.h"
#include "exit\exit.h"
#include "usart\usart.h"
#include "timer\timer.h"
#include "Systick.h"
#include "hc-sr04\hc_sr04.h"
#include "dht11\dht11.h"
int main()
{
float length=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();
Shake_Init();
Exti_Init();
uart1_Init();
Timer3_Init();
HC_SR04_Init();
while(1)
{
if(DHT11_Read()==1)
{
printf("shidu:%d--wendu:%d\r\n",data[0],data[2]);
}
ms_delay(1000);
}
}
延时函数都是用系统定时器写的 主控是STM32F10C8T6
附延时函数代码:
#include "Systick.h"
void ms_delay(uint32_t ms)
{
uint32_t i;
SysTick_Config(72000);
for(i=0;i<ms;i++)
{
while( !(SysTick->CTRL&(1<<16)));
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
void us_delay(uint32_t us)
{
uint32_t i;
SysTick_Config(72);
for(i=0;i<us;i++)
{
while( !(SysTick->CTRL&(1<<16)));
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
运行结果通过串口打印:

若使用HAL库驱动DHT11 一定要注意延时函数。














 7265
7265











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









