







资料包括:
(1)C语言视频
(2)STM32参考资料
(3)单片机学习视频
(4)原理图
(5)串口软件
(6)软件安装
(7)硬件电路
(8)程序源码
(9)模块资料
(10)机智云协议代码
(11)机智云APP
(12)程序下载教程
(13)机智云固件及烧写工具
(14)元件清单
(15)本设计使用(必看)
(16)零基础用户必看
基于STM32的室内环境检测系统

一、引言
随着智能家居技术的不断发展,人们对于室内环境质量的关注度也日益提高。一个舒适、健康的室内环境对于人们的居住和工作至关重要。基于STM32的室内环境检测系统集成了温湿度检测、空气质量检测、烟雾浓度检测、一氧化碳检测、气压检测以及自动窗帘和灯光控制等功能,旨在为用户提供一个全方位的室内环境监测与调控解决方案。本文将从系统硬件设计、软件实现、数据处理及网络通信等方面详细介绍该系统的设计与实现。
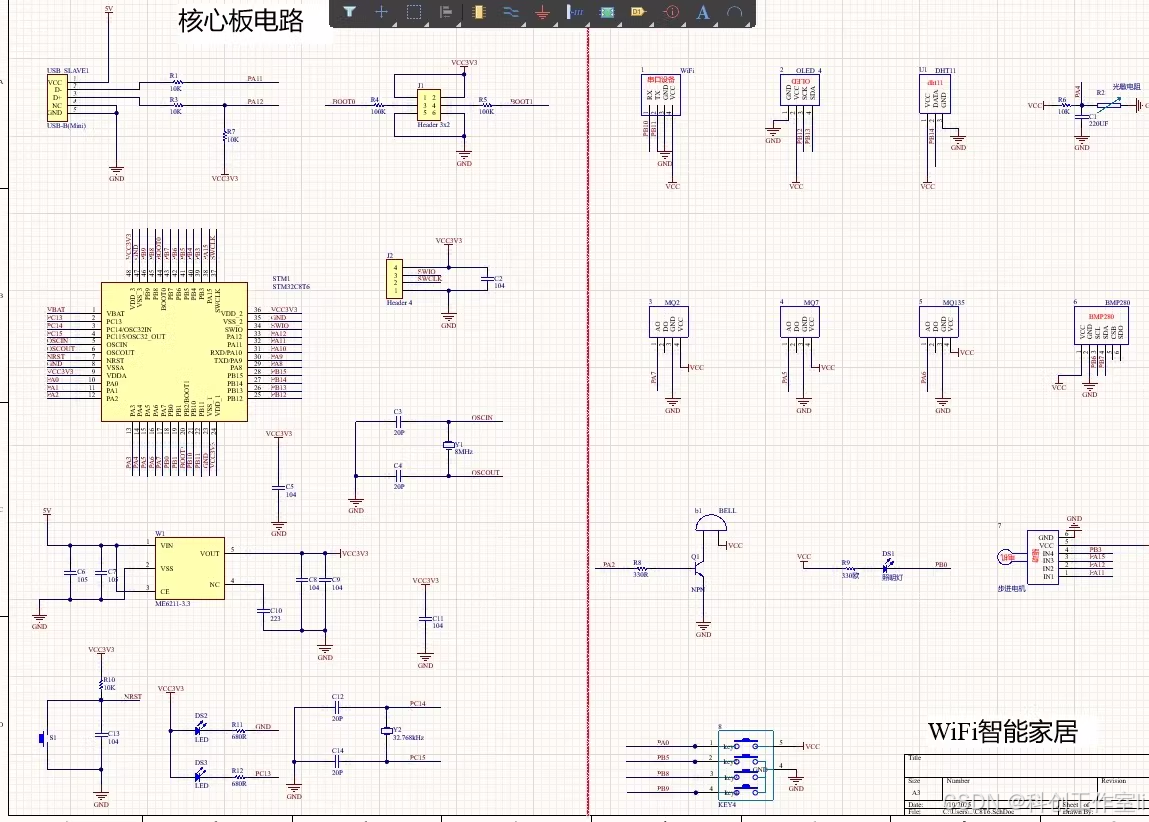
二、系统硬件设计
2.1 核心控制单元
本系统采用STM32F103C8T6(或其他STM32系列)开发板作为核心控制单元。STM32F103C8T6是一款高性能、低功耗的32位微控制器,具有丰富的外设接口和强大的处理能力,适用于各种嵌入式应用。它负责传感器数据的采集、处理以及通信控制等功能。
2.2 传感器模块
- 温湿度传感器:采用DHT11或DHT22温湿度传感器,用于测量室内的温度和湿度。这些传感器具有数字信号输出,通过一根数据线即可与STM32进行通信。
- 空气质量传感器:使用如MQ-135等空气质量传感器,用于测量空气中的有害气体浓度,反映空气质量。该传感器通过模拟信号输出,连接到STM32的ADC引脚进行数据采集。
- 烟雾浓度传感器:采用MQ-2烟雾传感器,用于检测室内的烟雾浓度。该传感器同样通过模拟信号输出,连接到STM32的ADC引脚。
- 一氧化碳传感器:使用专门的一氧化碳传感器(如MQ-7),用于检测室内的一氧化碳浓度。该传感器的工作原理与MQ-2类似,也是通过测量电阻值的变化来推断一氧化碳浓度。
- 气压传感器:采用专用的气压传感器(如MS5611),用于测量室内的气压值。该传感器通过I2C或SPI接口与STM32进行通信。
2.3 显示模块
采用OLED显示屏(如0.96寸128x64 OLED),用于实时显示温湿度、空气质量、烟雾浓度、一氧化碳浓度、气压等环境参数。OLED显示屏具有色彩鲜艳、对比度高、视角广等优点,能够提供清晰的视觉效果。
2.4 控制模块
- 窗帘控制:通过STM32的GPIO和定时器功能控制步进电机驱动器,实现窗帘的自动打开和关闭。步进电机驱动器连接到STM32的GPIO引脚,通过发送脉冲信号来控制步进电机的转动。
- 灯光控制:使用继电器模块或MOS管等开关元件,通过STM32的GPIO引脚控制灯光的开关。
2.5 通信模块
采用Wi-Fi模块(如ESP8266或ESP32),用于将监测数据远程传输到手机APP或云端服务器。Wi-Fi模块连接到STM32的USART或SPI接口,实现数据的无线传输。
2.6 电源模块
为整个系统提供稳定的电源供应。可以采用5V直流电源,通过稳压芯片(如LM1117)转换为3.3V供电给STM32和其他传感器模块。
三、系统软件设计
3.1 开发环境配置
使用STM32CubeMX软件配置STM32的外设并生成初始化代码。STM32CubeMX是一款图形化的配置工具,可以方便地设置STM32的时钟、GPIO、ADC、I2C、SPI、UART等外设。配置完成后,生成基于HAL库的代码框架,并在Keil uVision或STM32CubeIDE中进行编写、调试和下载代码。
3.2 主程序设计
基于生成的代码框架,编写环境参数的采集、数据处理、显示和上传功能代码。主程序的主要流程如下:
- 初始化系统时钟、GPIO、ADC、I2C、UART等外设。
- 采集温湿度、空气质量、烟雾浓度、一氧化碳浓度、气压等环境参数。
- 将采集到的数据进行处理和格式化,显示在OLED显示屏上。
- 判断各环境参数是否超出设定的阈值,若超出则触发报警(如蜂鸣器响、LED灯闪烁等)。
- 将监测数据通过Wi-Fi模块上传到手机APP或云端服务器。
- 进入无限循环,重复上述步骤。
3.3 传感器数据采集与处理
- 温湿度数据采集:通过DHT11或DHT22温湿度传感器的数据引脚连接到STM32的GPIO引脚,发送起始信号后读取温度和湿度的数值。
- 空气质量数据采集:将空气质量传感器的模拟输出连接到STM32的ADC引脚,通过ADC转换得到有害气体浓度的模拟值,再转换为实际的浓度值。
- 烟雾浓度数据采集:与空气质量数据采集类似,通过MQ-2烟雾传感器的模拟输出连接到STM32的ADC引脚进行数据采集。
- 一氧化碳数据采集:采用MQ-7一氧化碳传感器,同样通过模拟信号输出连接到STM32的ADC引脚进行数据采集。
- 气压数据采集:通过气压传感器的I2C或SPI接口与STM32进行通信,读取气压值。
3.4 显示与报警功能实现
- 显示功能:将采集到的环境参数格式化为字符串,通过OLED显示屏的I2C或SPI接口进行显示。可以设计多行显示,分别显示温湿度、空气质量、烟雾浓度、一氧化碳浓度、气压等信息。
- 报警功能:设置各环境参数的报警阈值,当采集到的数据超出阈值时,触发报警。报警方式可以采用蜂鸣器响、LED灯闪烁等。同时,可以将报警信息发送到手机APP进行提醒。
3.5 数据通信与远程监控
- Wi-Fi模块配置:通过STM32的USART或SPI接口与Wi-Fi模块进行通信,配置Wi-Fi模块的SSID和密码,连接到无线网络。
- 数据上传:将采集到的环境参数打包为JSON格式或其他协议格式,通过Wi-Fi模块上传到云端服务器或手机APP。云端服务器可以采用MQTT协议进行数据传输和接收。
- 远程监控:用户可以通过手机APP查看室内环境参数的实时监测数据、历史数据以及报警信息。APP界面可以设计直观、易用,方便用户随时掌握室内环境质量情况。
四、数据处理与算法实现
4.1 数据滤波与校准
为了提高数据采集的准确性和稳定性,可以采用数据滤波算法对采集到的数据进行处理。常见的滤波算法有均值滤波、中值滤波、卡尔曼滤波等。同时,对于传感器输出的原始数据,需要进行校准处理,以消除传感器自身的误差和漂移。
4.2 阈值设置与报警判断
根据实际应用需求,设置各环境参数的报警阈值。当采集到的数据超出阈值时,触发报警。报警判断可以采用简单的比较运算或更复杂的逻辑判断算法。同时,可以设置多级报警阈值,对应不同的报警级别和处理措施。
4.3 数据存储与分析
为了实现对历史数据的存储和分析,可以将采集到的数据保存在本地存储器(如SD卡)或上传到云端服务器。本地存储方便离线查看和备份数据;云端存储则可以实现远程访问和数据分析功能。通过对历史数据的分析,可以了解室内环境参数的变化趋势和规律,为后续的优化和调整提供依据。
五、网络通信方案
5.1 Wi-Fi通信协议选择
本系统采用Wi-Fi模块实现数据的无线传输。Wi-Fi通信协议可以选择TCP/IP或UDP等协议。TCP/IP协议具有可靠性高、数据完整性好等优点,适用于需要保证数据传输可靠性的场景;而UDP协议则具有传输速度快、实时性好等优点,适用于对数据传输速度要求较高的场景。根据实际应用需求选择合适的通信协议。
5.2 MQTT协议应用
为了实现数据的远程监控和管理,本系统采用MQTT协议进行数据传输和接收。MQTT是一种轻量级的消息传输协议,具有低功耗、低带宽占用、简单易用等优点。通过MQTT协议,可以将采集到的环境参数实时上传到云端服务器,并允许用户通过手机APP等客户端进行远程访问和控制。
5.3 云端服务器搭建
为了实现对数据的远程存储和分析功能,需要搭建一个云端服务器。云端服务器可以采用阿里云、腾讯云等公有云服务商提供的云服务器资源。在云端服务器上部署MQTT Broker(消息代理)和数据库等组件,用于接收、存储和分析上传的数据。同时,可以开发一套后台管理系统,方便对云端服务器进行管理和维护。
六、系统测试与优化
6.1 系统测试
在系统开发完成后,需要进行全面的测试工作以确保系统的稳定性和可靠性。测试内容包括功能测试、性能测试、兼容性测试等。功能测试主要验证系统是否满足设计要求;性能测试主要评估系统的响应速度和数据处理能力等;兼容性测试则主要检查系统在不同设备和环境下的兼容性和稳定性。
6.2 优化措施
根据测试结果,可以对系统进行相应的优化措施以提高系统的性能和稳定性。优化措施包括优化代码结构、提高数据处理效率、降低功耗等。同时,可以针对用户反馈和实际使用需求进行功能扩展和升级,以满足不断变化的市场需求。
七、结论与展望
基于STM32的室内环境检测系统集成了温湿度检测、空气质量检测、烟雾浓度检测、一氧化碳检测、气压检测以及自动窗帘和灯光控制等功能,为用户提供了一个全方位的室内环境监测与调控解决方案。该系统具有硬件成本低廉、软件设计灵活、数据处理能力强等优点,适用于家居、办公室
#include "sys.h"
#include "usart.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 使用
#endif
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART1, ENABLE); //使能串口
}
#if EN_USART1_RX //如果使能了接收
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使用ucosII了.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使用ucosII了.
OSIntExit();
#endif
}
#endif
/**
* @brief 发送单个字符
* @param ch: 要发送的字符
* @retval 无
*/
void USART1_SendChar(uint8_t ch) {
// 等待发送寄存器为空
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
// 发送字符
USART_SendData(USART1, ch);
}
/**
* @brief 发送字符串
* @param str: 要发送的字符串
* @retval 无
*/
void USART1_SendString(char *str) {
while (*str) {
USART1_SendChar(*str++); // 逐个发送字符
}
}
/**
* @brief 发送数据包
* @param data: 要发送的数据指针
* @param len: 数据长度
* @retval 无
*/
void USART1_SendData(unsigned char *data, unsigned short len) {
unsigned short i;
for (i = 0; i < len; i++) {
USART1_SendChar(data[i]); // 逐个发送数据
}
}
/**
* @brief 发送数字
* @param number: 要发送的数字
* @retval 无
*/
void USART1_SendNumber(int32_t number) {
char buffer[12]; // 用于存储转换后的字符串
snprintf(buffer, sizeof(buffer), "%d", number); // 将数字转换为字符串
USART1_SendString(buffer); // 发送字符串
}

















 2785
2785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











