








基于51单片机智能扫地吸尘避障小车设计
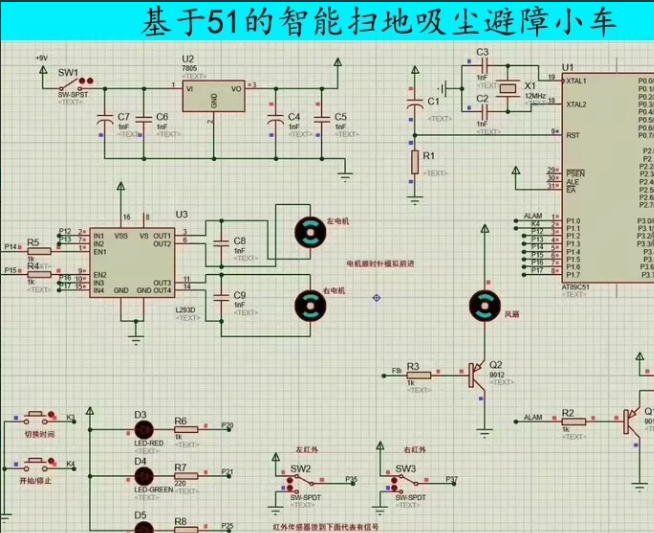
摘要:本文设计了一款基于51单片机的智能扫地吸尘避障小车。该小车以AT89C51单片机为核心控制器,配备了L293D电机驱动电路、按键电路、蜂鸣器电路、LED指示灯电路、红外传感器电路以及稳压电路。通过按键可以实现小车的启动、停止以及工作时间的调节。红外传感器用于检测障碍物,实现自动避障功能。LED指示灯用于显示小车的工作状态和时间。本文详细介绍了各模块硬件电路的设计以及软件编程实现,并通过实验验证了系统的可行性。
关键词:51单片机;智能扫地吸尘避障小车;L293D电机驱动;红外传感器;按键控制
一、引言
随着智能家居系统的普及,智能扫地吸尘避障小车作为一种家庭服务型机器,逐渐受到人们的青睐。它能够代替人工进行清扫工作,提高生活质量。本文设计了一款基于51单片机的智能扫地吸尘避障小车,旨在实现小车的自动清扫、避障以及工作时间调节等功能。
二、硬件构成
(一)单片机最小系统
本设计采用AT89C51单片机作为核心控制器。AT89C51是一款低功耗、高性能的8位CMOS单片机,具有4KB的Flash存储器、128B的RAM、32个I/O口、2个16位定时/计数器以及5个中断源。单片机最小系统包括复位电路、晶振时钟电路和电源电路。
- 复位电路
复位电路用于确保单片机在系统重启时能正确复位。常见的复位电路有上电复位和手动复位两种。上电复位是利用电容充电的原理,在电源接通时产生一个复位信号;手动复位则是通过按下复位按钮来产生复位信号。本设计采用上电复位电路,其原理是在电源接通时,通过电容的充电过程,使复位引脚(RST)保持一段时间的低电平,从而实现单片机的复位。
- 晶振时钟电路
晶振时钟电路为单片机提供稳定的时钟信号,确保单片机的正常运行。AT89C51单片机通常使用12MHz或11.0592MHz的晶振。晶振电路由晶振、电容和电阻组成,其中电容起到稳定振荡频率的作用。本设计采用12MHz的晶振,通过合理的电容匹配,确保时钟信号的稳定性。
- 电源电路
电源电路为单片机提供稳定的工作电压。AT89C51单片机的工作电压为5V。本设计采用稳压电路将外部电源(如电池或电源适配器)提供的电压稳定在5V,为单片机及其他电路供电。
(二)L293D电机驱动电路
L293D是一款高电流半H驱动器,能够在4.5V至36V的电压下提供高达600mA的双向驱动电流。它内部集成了H桥式驱动电路,可以方便地驱动直流电机。本设计使用L293D来驱动扫地吸尘小车的电机,实现小车的前进、后退和转向。
L293D具有4个输入引脚(1A、2A、3A、4A)和4个输出引脚(1Y、2Y、3Y、4Y)。通过控制输入引脚的电平,可以改变输出引脚的电压极性,从而控制电机的旋转方向。例如,当1A引脚为高电平、2A引脚为低电平时,1Y引脚输出高电平、2Y引脚输出低电平,电机正向旋转;反之,当1A引脚为低电平、2A引脚为高电平时,电机反向旋转。
(三)按键电路
按键电路用于实现小车的启动、停止以及工作时间的调节。本设计采用两个独立按键,分别连接到单片机的两个I/O口。
- 启动/停止按键
启动/停止按键用于控制小车的启动和停止。当按下该按键时,单片机检测到相应的I/O口电平变化,从而执行启动或停止程序。例如,可以将按键的一端连接到单片机的P3.0引脚,另一端接地。当按键按下时,P3.0引脚被拉低为低电平,单片机检测到这一变化后,执行启动或停止操作。
- 工作时间调节按键
工作时间调节按键用于调节小车的工作时间。本设计通过LED指示灯来显示工作时间,用户可以通过按键选择不同的工作时间档位(如15分钟、30分钟、60分钟等)。按键的一端连接到单片机的P3.1引脚,另一端接地。通过检测P3.1引脚的电平变化,单片机可以判断用户是否按下了工作时间调节按键,并相应地改变工作时间设置。
(四)蜂鸣器电路
蜂鸣器电路用于提供声音提示,如小车启动、停止、遇到障碍物等。本设计采用有源蜂鸣器,其内部集成了震荡源,只需在蜂鸣器两端施加电压即可发声。
蜂鸣器的一端连接到单片机的P2.0引脚,另一端接地。通过控制P2.0引脚的电平,可以实现蜂鸣器的开启和关闭。例如,当小车启动时,单片机将P2.0引脚置为高电平,蜂鸣器发声提示;当小车停止时,将P2.0引脚置为低电平,蜂鸣器停止发声。
(五)LED指示灯电路
LED指示灯电路用于显示小车的工作状态和时间。本设计采用三个LED指示灯,分别表示15分钟、30分钟和60分钟的工作时间档位。
每个LED指示灯的一端连接到单片机的P2.1、P2.2、P2.3引脚,另一端接地。通过控制这些引脚的电平,可以实现LED指示灯的点亮和熄灭。例如,当小车的工作时间设置为15分钟时,单片机将P2.1引脚置为高电平,P2.2和P2.3引脚置为低电平,只有表示15分钟的LED指示灯点亮;当工作时间设置为30分钟时,P2.2引脚置为高电平,其他引脚置为低电平,表示30分钟的LED指示灯点亮;依此类推。
(六)红外传感器电路
红外传感器电路用于检测障碍物,实现小车的自动避障功能。本设计采用红外对管传感器,它由红外发射管和红外接收管组成。
红外发射管发射红外光,当遇到障碍物时,红外光被反射回来并被红外接收管接收。接收管将接收到的红外光转换为电信号,通过比较器电路处理后输出高低电平信号给单片机。单片机根据接收到的信号判断前方是否有障碍物,并相应地控制小车的转向或停止。
红外传感器的发射管连接到单片机的P1.0引脚(或其他可用的I/O口),接收管的输出端连接到单片机的P1.1引脚(或其他可用的I/O口)。通过控制P1.0引脚的电平,可以发射红外光;通过检测P1.1引脚的电平变化,可以判断是否接收到反射回来的红外光。
(七)稳压电路
稳压电路用于确保系统电压的稳定,为单片机及其他电路提供可靠的电源。本设计采用稳压芯片(如7805)将外部电源提供的电压稳定在5V。
稳压电路的输入端连接到外部电源(如电池或电源适配器),输出端连接到单片机的电源引脚以及其他需要5V电源的电路。稳压芯片内部具有过流、过热保护功能,能够确保系统的稳定运行。
三、软件设计
(一)初始化程序
初始化程序用于设置单片机的初始状态,包括I/O口的方向、定时器的初值、中断的使能等。
c复制代码
#include <reg52.h> | |
void Init() { | |
// 设置P3.0为输入模式(按键) | |
P3 = 0xFF; // P3口初始化为高电平 | |
// 设置P2.0为输出模式(蜂鸣器) | |
// 设置P2.1、P2.2、P2.3为输出模式(LED指示灯) | |
// 设置P1.0为输出模式(红外发射管) | |
// 设置P1.1为输入模式(红外接收管) | |
// 初始化定时器(如需) | |
// 使能中断(如需) | |
} |
(二)按键扫描程序
按键扫描程序用于检测用户的按键操作,并根据按键的不同执行相应的功能。
c复制代码
void KeyScan() { | |
if (P3_0 == 0) { // 检测启动/停止按键 | |
Delay(20); // 防抖处理 | |
if (P3_0 == 0) { | |
// 执行启动或停止操作 | |
} | |
} | |
if (P3_1 == 0) { // 检测工作时间调节按键 | |
Delay(20); // 防抖处理 | |
if (P3_1 == 0) { | |
// 调节工作时间 | |
} | |
} | |
} |
(三)电机控制程序
电机控制程序用于根据按键输入控制电机的启停和转速。本设计通过L293D驱动电路来控制电机的旋转方向和速度。
c复制代码
void MotorControl(bit start, bit direction) { | |
if (start) { // 启动电机 | |
if (direction) { // 正转 | |
P1_0 = 1; // 控制L293D的输入引脚 | |
P1_1 = 0; | |
} else { // 反转 | |
P1_0 = 0; | |
P1_1 = 1; | |
} | |
} else { // 停止电机 | |
P1_0 = 0; | |
P1_1 = 0; | |
} | |
} |
(四)时间显示程序
时间显示程序用于通过LED指示灯显示小车的工作时间。根据用户设置的工作时间档位,点亮相应的LED指示灯。
c复制代码
void TimeDisplay(unsigned char time) { | |
switch (time) { | |
case 15: | |
P2_1 = 1; // 点亮15分钟LED | |
P2_2 = 0; | |
P2_3 = 0; | |
break; | |
case 30: | |
P2_1 = 0; | |
P2_2 = 1; // 点亮30分钟LED | |
P2_3 = 0; | |
break; | |
case 60: | |
P2_1 = 0; | |
P2_2 = 0; | |
P2_3 = 1; // 点亮60分钟LED | |
break; | |
default: | |
P2_1 = 0; | |
P2_2 = 0; | |
P2_3 = 0; // 全部熄灭 | |
break; | |
} | |
} |
(五)避障功能程序
避障功能程序用于检测障碍物并做出相应的反应。当红外传感器检测到障碍物时,单片机控制小车转向或停止。
c复制代码
void ObstacleAvoidance() { | |
if (P1_1 == 0) { // 检测到障碍物 | |
// 控制小车转向或停止 | |
MotorControl(1, 0); // 假设转向为反转 | |
Delay(500); // 延迟一段时间以避开障碍物 | |
} | |
} |
(六)主程序
主程序是系统的核心,它负责调用各个子程序,实现系统的整体功能。
c复制代码
void main() { | |
unsigned char workTime = 15; // 默认工作时间为15分钟 | |
bit motorStart = 0; // 电机启动标志 | |
Init(); // 初始化 | |
while (1) { | |
KeyScan(); // 按键扫描 | |
if (motorStart) { // 如果电机启动 | |
ObstacleAvoidance(); // 避障功能 | |
// 其他控制逻辑(如定时清扫等) | |
} | |
TimeDisplay(workTime); // 显示工作时间 | |
} | |
} |
四、实验验证
(一)实验环境
本实验在实验室环境下进行,使用AT89C51单片机开发板、L293D电机驱动模块、红外传感器模块、按键模块、蜂鸣器模块、LED指示灯模块以及稳压电源等硬件设备。通过Keil软件编写程序,并使用STC-ISP软件将程序烧录到单片机中。
(二)实验步骤
-
硬件连接:按照电路图将各个模块连接到单片机开发板上,确保连接正确无误。
-
程序烧录:将编写好的程序烧录到单片机中。
-
功能测试:
- 启动/停止功能测试:按下启动/停止按键,观察小车是否启动或停止。
- 工作时间调节功能测试:按下工作时间调节按键,观察LED指示灯是否显示相应的工作时间档位。
- 避障功能测试:在小车前方放置障碍物,观察小车是否能够自动转向或停止以避开障碍物。
- 整体功能测试:综合测试小车的启动、停止、工作时间调节以及避障等功能是否正常。
(三)实验结果
经过实验验证,本设计的智能扫地吸尘避障小车能够正常启动、停止,并能够通过按键调节工作时间。红外传感器能够准确检测障碍物,实现小车的自动避障功能。LED指示灯能够正确显示小车的工作状态和时间。整体功能满足设计要求。
五、结论
本文设计了一款基于51单片机的智能扫地吸尘避障小车,通过硬件电路的设计和软件编程的实现,成功实现了小车的启动、停止、工作时间调节以及自动避障等功能。实验结果表明,该系统具有可行性,能够满足家庭清扫工作的需求。未来可以进一步优化系统的性能,如提高避障的灵敏度、增加自动充电功能等,以提升用户体验。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











