







问题展示:
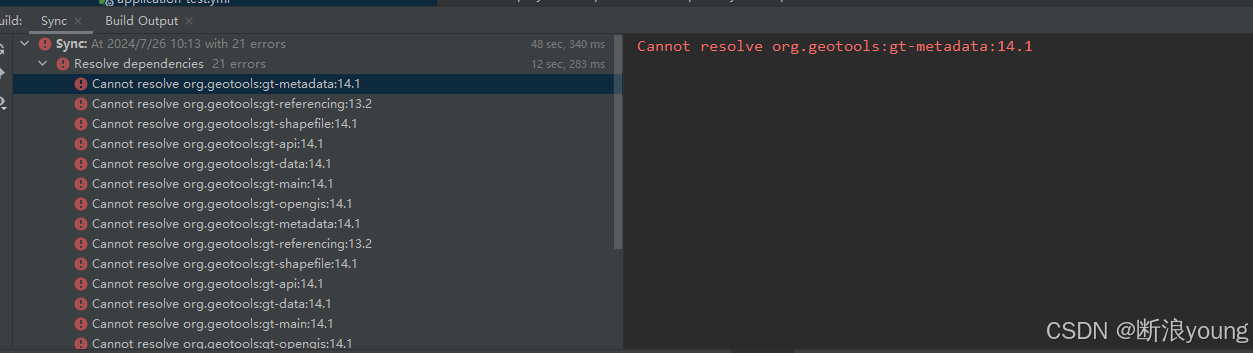
maven引入了一系列的geotools包全都报错
<!-- 这个一般和java的version写在一个地方 -->
<geotools.version>14.1</geotools.version>
<dependency>
<groupId>org.geotools</groupId>
<artifactId>gt-shapefile</artifactId>
<version>${geotools.version}</version>
</dependency>
<dependency>
<groupId>org.geotools</groupId>
<artifactId>gt-api</artifactId>
<version>${geotools.version}</version>
</dependency>
<dependency>
<groupId>org.geotools</groupId>
<artifactId>gt-opengis</artifactId>
<versi 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2746
2746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









