







目录
1.安装wsl2与最新Ubuntu发行版(系统盘)
①使用管理员身份运行powershell,运行以下命令,安装wsl(需科学上网),并将wsl的版本默认设置为wsl2,安装完后,在开始菜单里会有新添加的WSL软件,打开便可以直接进入Ubuntu
wsl --install
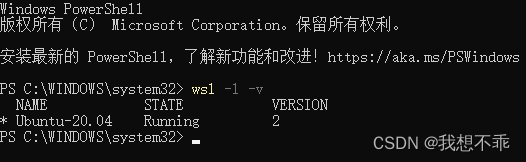
wsl --set-default-version 2②默认会在C盘安装最新的Ubuntu Lts发行版(22.04),在powershell中运行以下命令查看当前安装的ubuntu信息(Ubuntu名称、所用wsl版本)
wsl -l -v(如果第一次安装查询的最新的Ubuntu名称是Ubuntu,不带版本后缀的,下图是我卸载掉Ubuntu22.04后安装Ubuntu20.04的查询截图)
参考官网教程:
2.卸载最新Ubuntu发行版
在powershell中运行以下命令
wsl --unregister Ubuntu参考官网教程:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









