






 本文详细介绍了基于MCNN的密度图生成方法,包括数据集分析、密度函数表示、高斯核函数的应用以及代码实现。通过使用高斯核函数对人头标注进行加权,可以生成反映人群密度的图像。提供的Python代码展示了固定参数和几何自适应核两种方法。
本文详细介绍了基于MCNN的密度图生成方法,包括数据集分析、密度函数表示、高斯核函数的应用以及代码实现。通过使用高斯核函数对人头标注进行加权,可以生成反映人群密度的图像。提供的Python代码展示了固定参数和几何自适应核两种方法。
概述
本文主要以个人学习的顺序复现了MCNN( Multi-column Convolutional Neural Network )中提出的生成密度图的方法。
数据集分析
本文使用的数据集shanghaiTech由原始图片和标注文件共同构成,该数据集包含part_A_final,part_B_final两部分。
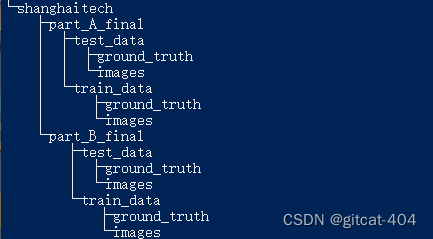
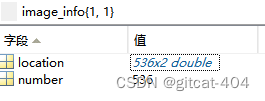
以 part_A_final为例,包含了test data与train data,两者不重复,组成形式相同。其中,images为原始图片,ground_truth标注文件是mat格式,里面记录了每个注释人头的二维坐标和总人头数量。
密度图生成原理
1.密度函数表示
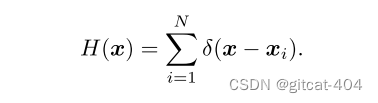
如果在像素xi处存在头部,我们将其表示为delta函数δ(x − xi)。因此,具有标记的N个头部的图像可以表示为函数
补充delta函数定义:
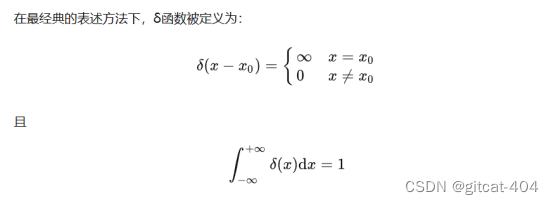
通俗来理解,H(x)为与原始图像大小相同的矩阵,当位置xi处有一个人头时,矩阵中该位置的点置为1,其余为0。
2.高斯核函数与参数确定
对于给定图像中的每个头部xi,我们将到其k个最近邻居的距离表示为{di 1,di 2,...,di m}。因此平均距离为d¯ i = 1/ m ∑ di j。因此,与xi相关联的像素对应于场景中地面上的区域,该区域的半径大致与di成比例。因此,为了估计像素xi周围的人群密度,我们需要将δ(x-xi)与方差σi与¯di成比例的高斯核卷积。

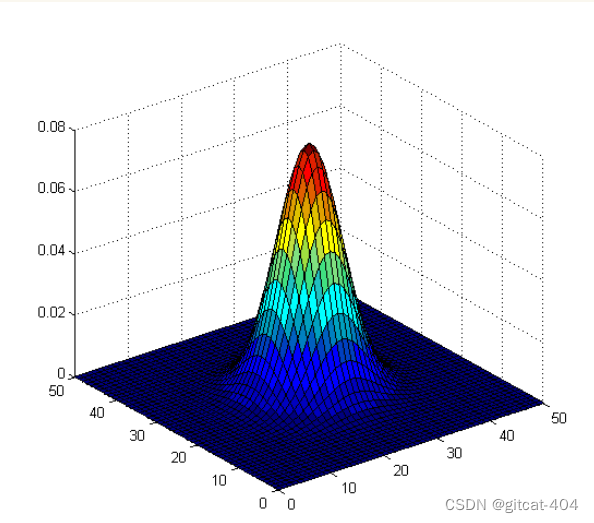
本问题需要使用到的二位高斯核函数:

3.为什么使用高斯核函数?
高斯核的函数图像是一个正态分布钟形线,坐标越趋近中心点,值就越大,反之越小。也就是说离中心点越近权值就越大,离中心点越远,权值就越小。
举例:
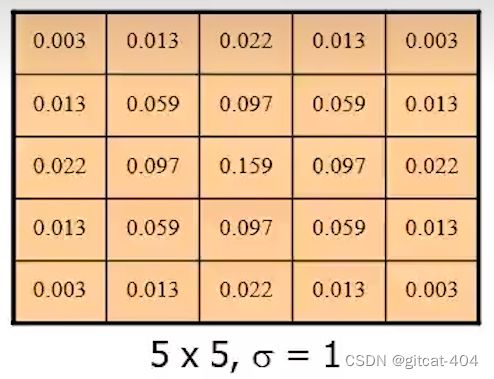
对中心点使用高斯核函数后,周围像素点的权值相加起来等于1;这样既不影响生成的密度图中总人头数,又能够比较真实的反应每个人头在空间里面的位置特征。
代码实现
固定参数核python代码复现:
#固定参数核
import numpy as np
from scipy.ndimage import gaussian_filter
def compute_density_map(im, points):
#根据图片大小生成全0矩阵
h, w = im.shape[:2]
im_density = np.zeros((h, w))
#如果坐标点个数即人头数为1,则将该点对应的像素位置设置为最大值255,并返回
if len(points) == 1:
x1 = max(1, min(w, round(points[0, 0])))
y1 = max(1, min(h, round(points[0, 1])))
im_density[y1, x1] = 255
return im_density
#对每个标注点开始遍历
#定义一个高斯窗口的尺寸(f_sz)和标准差(sigma),并使用fspecial函数创建一个高斯滤波器(H)
for point in points:
f_sz = 15
sigma = 4.0
#生成高斯核
H = gaussian_filter(np.zeros((f_sz, f_sz)), sigma)
#将坐标点坐标floor向下取整,计算出在矩阵中的位置,并限定在图像最大尺寸与【1,1】之间
x = min(w, max(1, int(np.floor(point[0]))))
y = min(h, max(1, int(np.floor(point[1]))))
#超出范围的点舍弃
if x > w or y > h:
continue
#根据窗口大小计算出左上角(x1,y1)和右下角坐标(x2,y2)
x1 = x - int(f_sz/2)
y1 = y - int(f_sz/2)
x2 = x + int(f_sz/2)
y2 = y + int(f_sz/2)
dfx1 = 0
dfy1 = 0
dfx2 = 0
dfy2 = 0
change_H = False
#判断高斯核尺寸是否超过图像边界如果超过则改变
if x1 < 1:
dfx1 = abs(x1) + 1
x1 = 1
change_H = True
if y1 < 1:
dfy1 = abs(y1) + 1
y1 = 1
change_H = True
if x2 > w:
dfx2 = x2 - w
x2 = w
change_H = True
if y2 > h:
dfy2 = y2 - h
y2 = h
change_H = True
#计算裁剪后的区域在高斯滤波器核矩阵中的宽度和高度
x1h = 1 + dfx1
y1h = 1 + dfy1
x2h = f_sz - dfx2
y2h = f_sz - dfy2
if change_H:
H = gaussian_filter(np.zeros((y2h - y1h + 1, x2h - x1h + 1)), sigma)
#将高斯滤波器(H)加到矩阵 im_density 的相应位置上,以构建密度图
im_density[y1-1:y2, x1-1:x2] += H
return im_density几何自适应核 python复现:
#几何自适应核
import numpy as np
from scipy.ndimage import gaussian_filter
import scipy
def compute_density_map(im, points):
#根据图片大小生成全0矩阵
h, w = im.shape[:2]
im_density = np.zeros((h, w))
#如果坐标点个数即人头数为1,则将该点对应的像素位置设置为最大值255,并返回
if len(points) == 1:
x1 = max(1, min(w, round(points[0, 0])))
y1 = max(1, min(h, round(points[0, 1])))
im_density[y1, x1] = 255
return im_density
pts = np.array(zip(np.nonzero(im)[1], np.nonzero(im)[0]))
leafsize = 2048
# build kdtree
tree = scipy.spatial.KDTree(pts.copy(), leafsize=leafsize)
# query kdtree
distances, locations = tree.query(pts, k=4)
#对每个标注点开始遍历
#定义一个高斯窗口的尺寸(f_sz)和标准差(sigma),并使用fspecial函数创建一个高斯滤波器(H)
for point in points:
f_sz = 15
#kd数搜索出离该目标点最近的4个标注点距离,去除最近的,剩余3个距离相加取平均,再乘上文章中取的beta=0.3
sigma = (distances[point][1]+distances[point][2]+distances[point][3])*0.3/3
#生成高斯核
H = gaussian_filter(np.zeros((f_sz, f_sz)), sigma)
#将坐标点坐标floor向下取整,计算出在矩阵中的位置,并限定在图像最大尺寸与【1,1】之间
x = min(w, max(1, int(np.floor(point[0]))))
y = min(h, max(1, int(np.floor(point[1]))))
#超出范围的点舍弃
if x > w or y > h:
continue
#根据窗口大小计算出左上角(x1,y1)和右下角坐标(x2,y2)
x1 = x - int(f_sz/2)
y1 = y - int(f_sz/2)
x2 = x + int(f_sz/2)
y2 = y + int(f_sz/2)
dfx1 = 0
dfy1 = 0
dfx2 = 0
dfy2 = 0
change_H = False
#判断高斯核尺寸是否超过图像边界如果超过则改变
if x1 < 1:
dfx1 = abs(x1) + 1
x1 = 1
change_H = True
if y1 < 1:
dfy1 = abs(y1) + 1
y1 = 1
change_H = True
if x2 > w:
dfx2 = x2 - w
x2 = w
change_H = True
if y2 > h:
dfy2 = y2 - h
y2 = h
change_H = True
#计算裁剪后的区域在高斯滤波器核矩阵中的宽度和高度
x1h = 1 + dfx1
y1h = 1 + dfy1
x2h = f_sz - dfx2
y2h = f_sz - dfy2
if change_H:
H = gaussian_filter(np.zeros((y2h - y1h + 1, x2h - x1h + 1)), sigma)
#将高斯滤波器(H)加到矩阵 im_density 的相应位置上,以构建密度图
im_density[y1-1:y2, x1-1:x2] += H
return im_density效果(部分)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









