







我们对一阶系统引入控制器可以将一阶系统变为二阶系统
二阶系统会多了振荡,当然,不同的二阶系统有不同的特性,具体问题具体分析
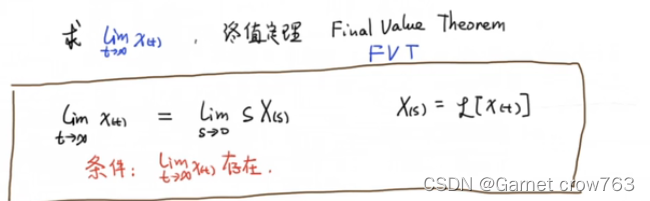
终值定理:公式及条件如下 ,存在终值才有意义
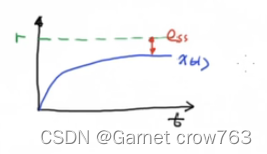
稳态误差(ess):ess=r-x(t),稳态误差=参考值-输出函数,
系统稳态值需要存在,即有极点,这个系统稳定,可以使用终值定理。
通过一系列推到,求得ess=...如图所示:
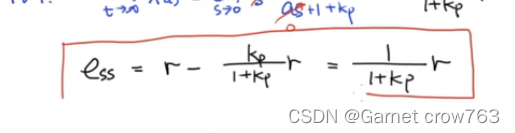
kp为比例控制 ,可发先kp越小,稳态误差越大。
所以有比例控制时,稳态误差不会消失。
我们对一阶系统引入控制器可以将一阶系统变为二阶系统
二阶系统会多了振荡,当然,不同的二阶系统有不同的特性,具体问题具体分析
终值定理:公式及条件如下 ,存在终值才有意义
稳态误差(ess):ess=r-x(t),稳态误差=参考值-输出函数,
系统稳态值需要存在,即有极点,这个系统稳定,可以使用终值定理。
通过一系列推到,求得ess=...如图所示:
kp为比例控制 ,可发先kp越小,稳态误差越大。
所以有比例控制时,稳态误差不会消失。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























