两个传递函数分别为
G
1
(
s
)
G_1(s)
G1(s)与
G
2
(
s
)
G_2(s)
G2(s)的环节,以并联方式连接,其等效传递函数为
G
(
s
)
G(s)
G(s),则
G
(
s
)
G(s)
G(s)为
G
1
(
s
)
+
G
2
(
s
)
G_1(s)+G_2(s)
G1(s)+G2(s)。
S若某单位负反馈控制系统的前向传递函数为
G
(
s
)
G(s)
G(s),则该系统的开环传递函数为
G
(
s
)
G(s)
G(s)。
控制系统的数学模型,取决于系统结构和参数,与外作用及初始条件无关。
线性系统,当输入是单位脉冲函数时,其输出象函数与传递函数相同
某典型环节的传递函数是
G
(
s
)
=
1
s
+
2
G(s)=\cfrac1{s+2}
G(s)=s+21则系统的时间常数是0.5。
c
o
s
(
w
0
t
)
u
(
t
)
cos(w_0t)u(t)
cos(w0t)u(t)
s
s
3
+
w
0
2
\cfrac{s}{s^3+w_0^2}
s3+w02s
s
i
n
(
w
0
t
)
u
(
t
)
sin(w_0t)u(t)
sin(w0t)u(t)
w
0
s
3
+
w
0
2
\cfrac{w_0}{s^3+w_0^2}
s3+w02w0
2.1.2. 拉普拉斯变换的性质
性质
解释
线性性质
[
a
f
1
(
t
)
+
b
f
2
(
t
)
]
L
T
↔
[
a
F
1
(
T
)
+
b
F
2
(
t
)
]
[af_1(t)+bf_2(t)]\overleftrightarrow{LT}[aF_1(T)+bF_2(t)]
[af1(t)+bf2(t)]LT[aF1(T)+bF2(t)]
尺度变换
f
(
a
t
)
L
T
↔
1
a
F
(
s
a
)
f(at)\overleftrightarrow{LT}\frac 1aF(\frac sa)
f(at)LTa1F(as)
时移特性
f
(
t
−
t
0
)
L
T
↔
F
(
s
)
e
−
s
t
0
f(t-t_0)\overleftrightarrow{LT}F(s)e^{-st_0}
f(t−t0)LTF(s)e−st0
复频移(s域平移)特性
f
(
t
)
e
s
t
0
L
T
↔
F
(
s
−
s
0
)
f(t)e^{st_0}\overleftrightarrow{LT}F(s-s_0)
f(t)est0LTF(s−s0)
2.2. 传递函数的定义和性质
定义:线性定常系统的传递函数,定义为零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比
性质:只取决于系统或元件的结构和参数,而与输入量的形式无关,也不反应系统内部的任何信息
Φ
(
s
)
=
G
(
s
)
1
+
G
(
s
)
\Phi(s)=\cfrac{G(s)}{1+G(s)}
Φ(s)=1+G(s)G(s)
G
(
s
)
G(s)
G(s)是开环传递函数,
Φ
(
s
)
\Phi(s)
Φ(s)是闭环传递函数,令分母等于
0
0
0就是闭环特性方程。
系统开环增益
例如
50
(
2
s
+
1
)
(
s
+
5
)
\cfrac{50}{(2s+1)(s+5)}
(2s+1)(s+5)50,将各环节标准化,惯性环节应该化成
K
T
s
+
1
\cfrac{K}{Ts+1}
Ts+1K的形式,即
10
(
2
s
+
1
)
(
0.2
s
+
1
)
,故系统开环增益为
10
。
\cfrac{10}{(2s+1)(0.2s+1)},故系统开环增益为10。
(2s+1)(0.2s+1)10,故系统开环增益为10。
2.3. 典型环节的传递函数
典型环节
传递函数
比例环节
K
K
K
理想微分环节
τ
s
\tau s
τs(
τ
\tau
τ 时间常数)
实际微分环节
T
c
T
c
s
+
1
\cfrac{T_c}{T_cs+1}
Tcs+1Tc
比例微分环节
1
R
+
1
R
T
s
\frac1R+\frac1RTs
R1+R1Ts
积分环节
K
s
\frac Ks
sK
一阶惯性环节
K
T
s
+
1
\cfrac{K}{Ts+1}
Ts+1K
二阶惯性环节
w
n
2
s
2
+
2
ζ
w
n
s
+
w
n
2
\cfrac{w_n^2}{s^2+2\zeta w_ns+w_n^2}
s2+2ζwns+wn2wn2
延迟环节
e
τ
s
e^{\tau s}
eτs
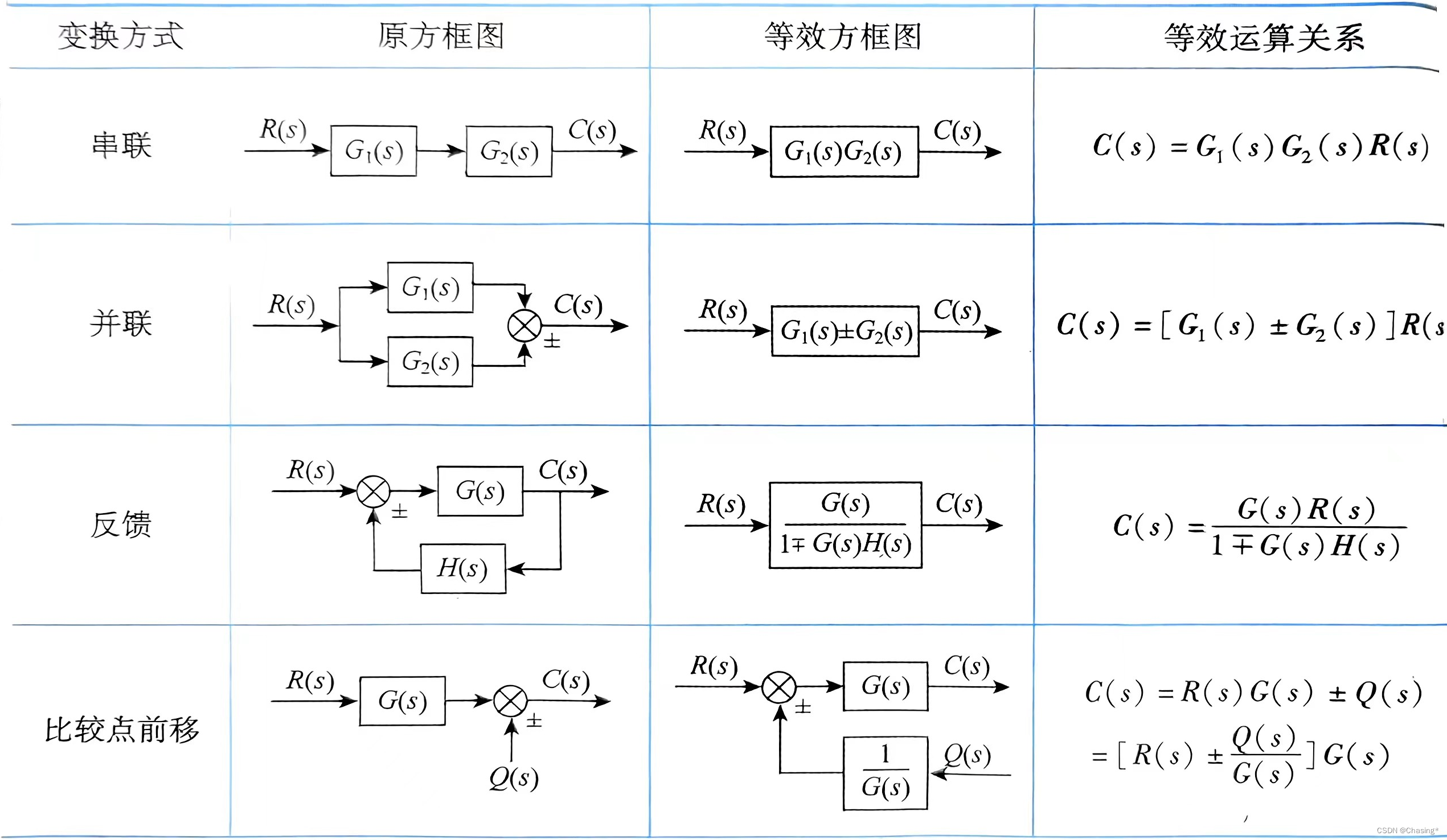
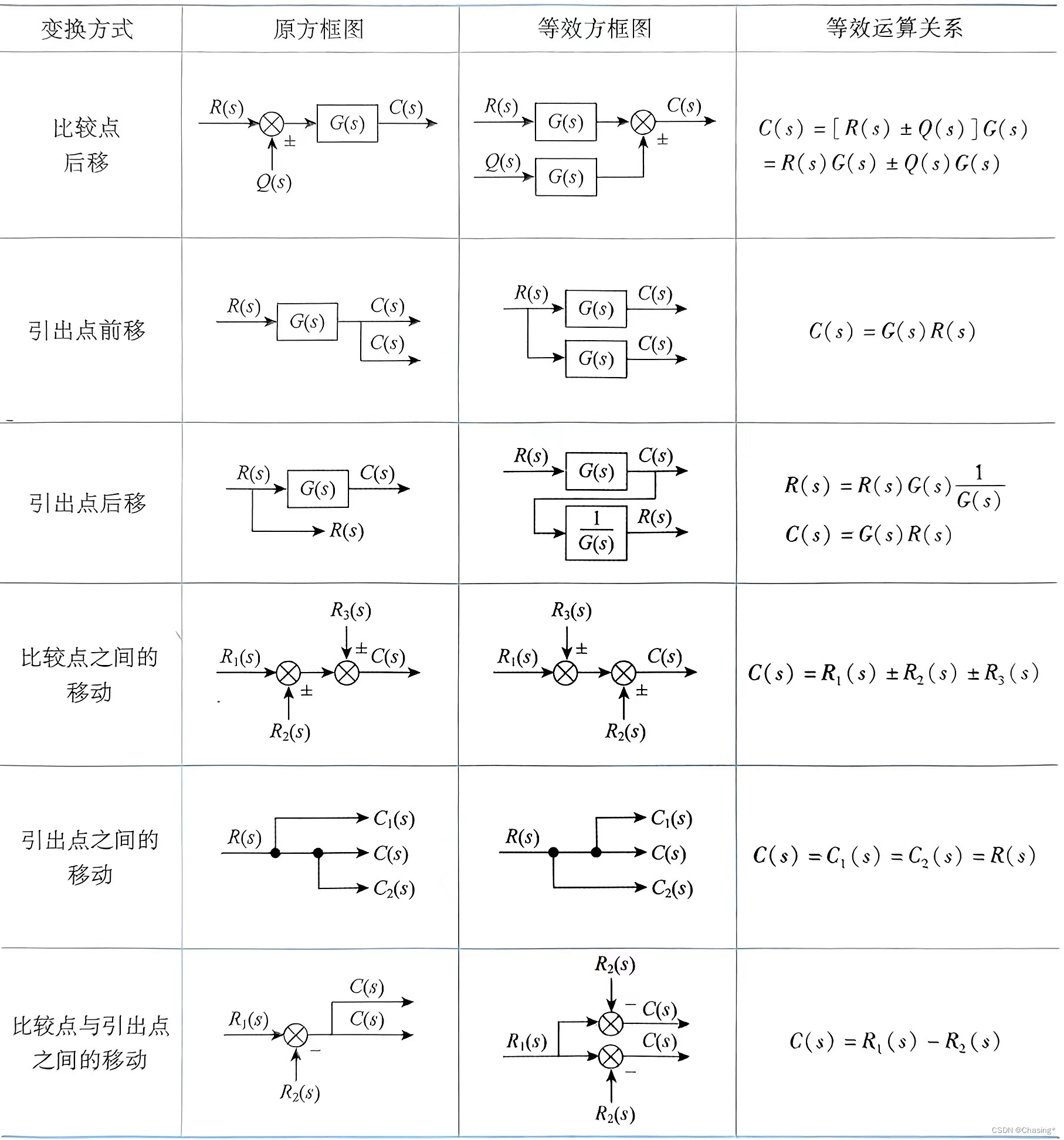
2.4. 结构图的等效变换和化简
变换方式
等效运算关系
串联
C
(
s
)
=
G
1
(
s
)
G
2
(
s
)
R
(
s
)
C(s)=G_1(s)G_2(s)R(s)
C(s)=G1(s)G2(s)R(s)
并联
C
(
s
)
=
[
G
1
(
s
)
±
G
2
(
s
)
]
R
(
s
)
C(s)=[G_1(s)\pm G_2(s)]R(s)
C(s)=[G1(s)±G2(s)]R(s)
反馈
C
(
s
)
=
G
(
s
)
R
(
s
)
1
∓
G
(
s
)
H
(
s
)
C(s)=\frac{G(s)R(s)}{1 \mp G(s)H(s)}
C(s)=1∓G(s)H(s)G(s)R(s)























 459
459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









