1.部署NCNN
# 检查更新
sudo apt-get update
sudo apt-get upgrade
# 安装依赖
sudo apt-get install cmake wget
sudo apt-get install build-essential gcc g++
sudo apt-get install libprotobuf-dev protobuf-compiler
# 下载ncnn项目文件
git clone https://github.com/Tencent/ncnn.git
cd ncnn
git submodule update --init
# 编译ncnn
cmake -D NCNN_DISABLE_RTTI=OFF -D NCNN_BUILD_TOOLS=ON \
-D CMAKE_TOOLCHAIN_FILE=../toolchains/aarch64-linux-gnu.toolchain.cmake ..
make -j4 # make -j$(nproc)
make install
# 把文件移到/usr/local/目录
sudo mkdir /usr/local/lib/ncnn
sudo cp -r install/include/ncnn /usr/local/include/ncnn
sudo cp -r install/lib/libncnn.a /usr/local/lib/ncnn/libncnn.a
# 测试是否安装成功
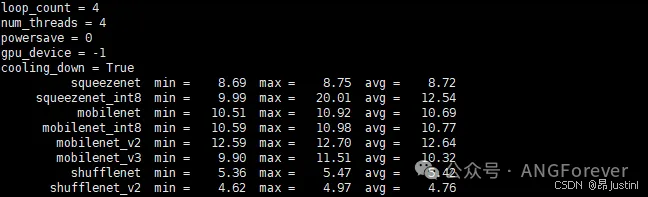
cd ../python
python3 tests/benchmark.py
2.Yolov11模型转换&试运行
# 使用ultralytics库
yolo export model=base_yolo11s.pt format=ncnn
# 24.9.22 优化了参数显示 | 对内存占用更小
import cv2
import torch
from logger import logger
from picamera2 import Picamera2
from ultralytics import YOLO
from utils import random_color
model = YOLO("Vision/models/base_yolo11s_ncnn_model", task="detect")
logger.info("Pre-trained YOLOv11s Model loaded")
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
logger.info(f"Device using: {device}")
def Predict(model, img, classes=[], min_conf=0.5, device="cpu"):
"""
Using Predict Model to predict objects in img.
Input classes to choose which to output.
eg. Predict(chosen_model, img_input, classes=[human], min_conf=0.5)
"""
if classes:
results = model.predict(
img, classes=classes, conf=min_conf, device=device, stream=True
)
else:
results = model.predict(img, conf=min_conf, device=device, stream=True)
return results
def Predict_and_detect(
model,
img,
classes=[],
min_conf=0.5,
rectangle_thickness=2,
text_thickness=1,
device="cpu",
):
"""
Using Predict Model to predict objects in img and detect the objects out.
Input classes to choose which to output.
eg. Predict_and_detect(chosen_model, img, classes=[], conf=0.5, rectangle_thickness=2, text_thickness=1)
"""
results = Predict(model, img, classes, min_conf=min_conf, device=device)
for result in results:
for box in result.boxes:
left, top, right, bottom = (
int(box.xyxy[0][0]),
int(box.xyxy[0][1]),
int(box.xyxy[0][2]),
int(box.xyxy[0][3]),
)
confidence = box.conf.tolist()[0]
label = int(box.cls[0])
color = random_color(label)
cv2.rectangle(
img,
(left, top),
(right, bottom),
color=color,
thickness=rectangle_thickness,
lineType=cv2.LINE_AA,
)
caption = f"{result.names[label]} {confidence:.2f}"
w, h = cv2.getTextSize(caption, 0, 1, 2)[0]
cv2.rectangle(
img, (left - 3, top - 33), (left + w + 10, top), color, -1
)
cv2.putText(
img,
caption,
(left, top - 5),
0,
1,
(0, 0, 0),
text_thickness,
16,
)
return img, results
picam2 = Picamera2()
picam2.start()
while True:
# read frame
# ret, frame = camera.read()
image = picam2.capture_array("main")
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
# Perform object detection on an image
result_img, _ = Predict_and_detect(
model, image, classes=[], min_conf=0.5, device=device
)
# Display results
cv2.imshow("YOLOv11 Inference", result_img)
key = cv2.waitKey(1)
if key == 32: # 空格
break
picam2.close()
cv2.destroyAllWindows()






















 4801
4801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









