






欧姆龙CP1H项目程序,程序包含四轴?一个NC413轴控制模块一起五个,有轴的点动,回零,相对与绝对定位,扩展两个I/O模块,整个项目的模块都有:主控程序,复位程序,手动,程序流程清晰明了
ID:9218656324779186
浪吧差2021

欧姆龙CP1H项目程序的设计与实现
引言:
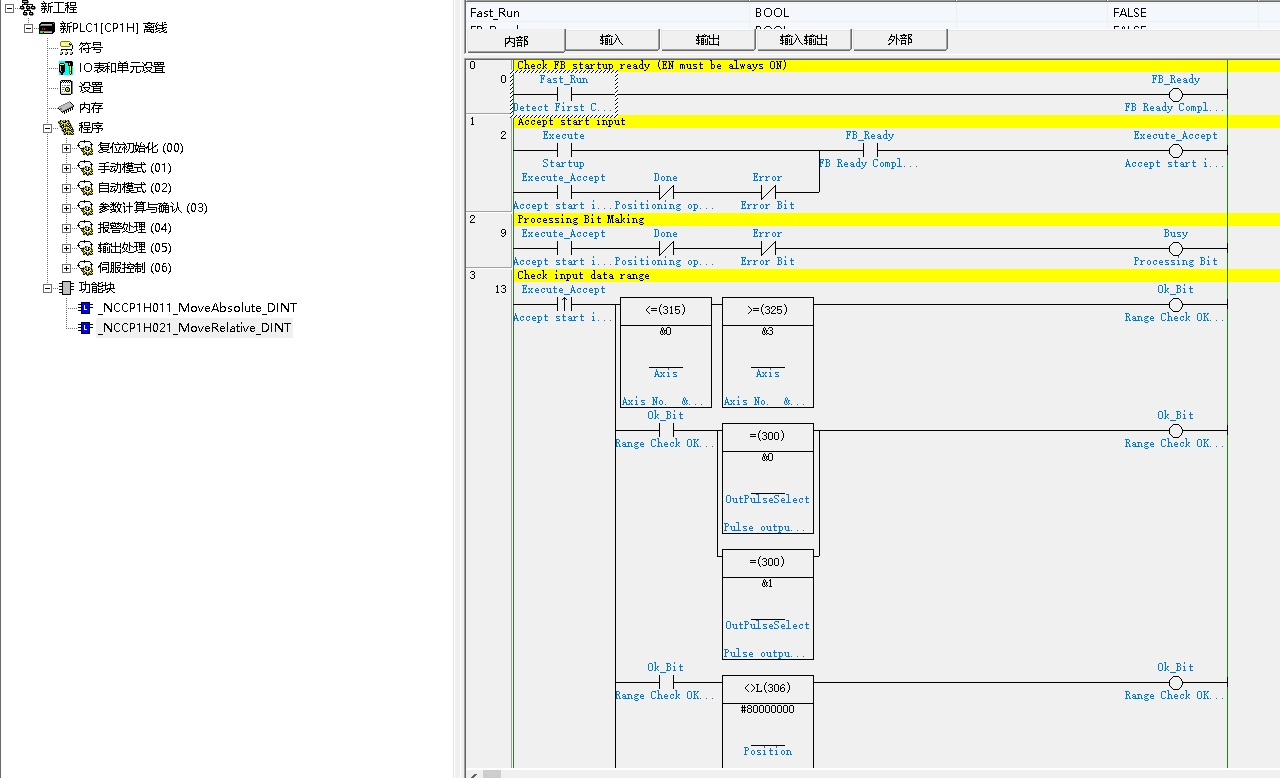
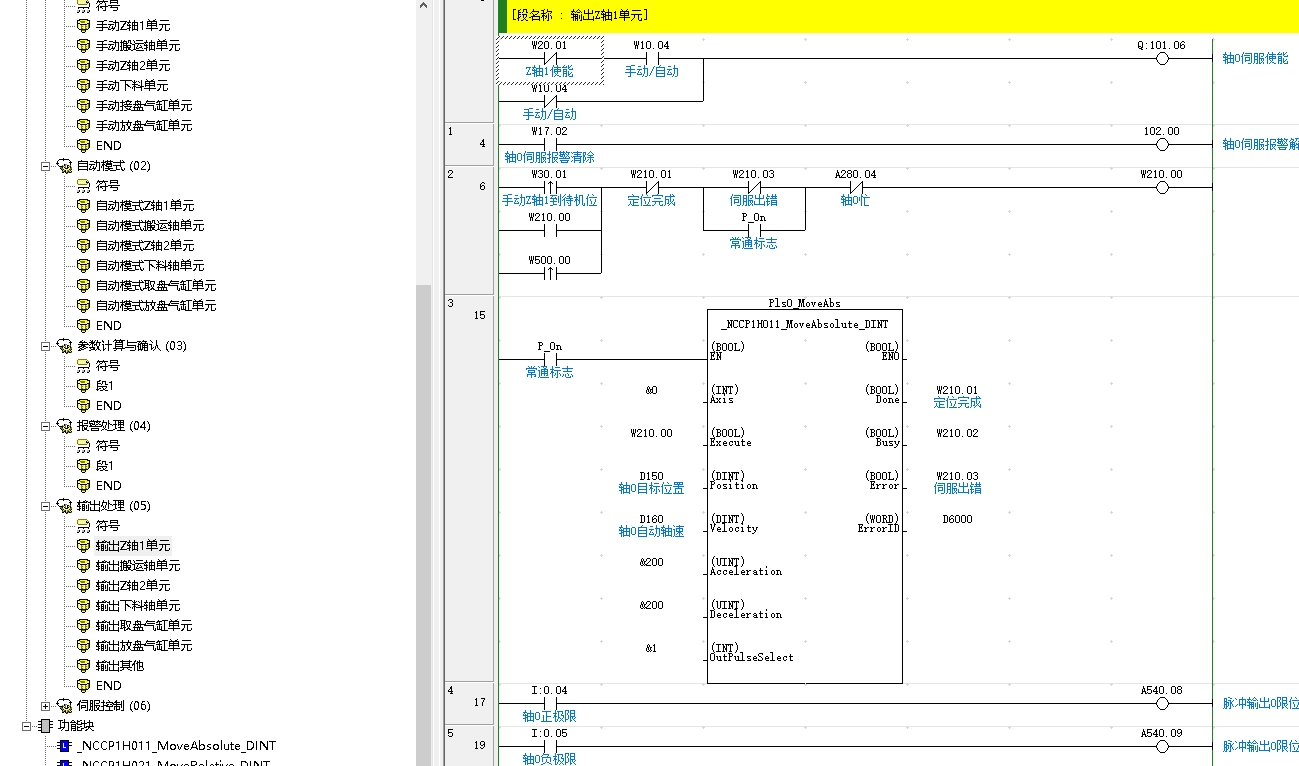
欧姆龙CP1H项目程序是一个包含四轴控制的程序,其中还包括一个NC413轴控制模块和五个轴,该程序实现了轴的点动、回零、相对与绝对定位,并扩展了两个I/O模块。本文将对整个项目的模块进行详细讲解,包括主控程序、复位程序、手动控制和程序流程。
一、主控程序:
主控程序是整个项目的核心,负责控制四轴的运动和协调。在欧姆龙CP1H项目中,主控程序采用了一种优化的算法,实现了快速、准确的轴运动控制。该算法主要基于PID控制原理,通过对位置误差的不断修正,实现轴的精确定位。
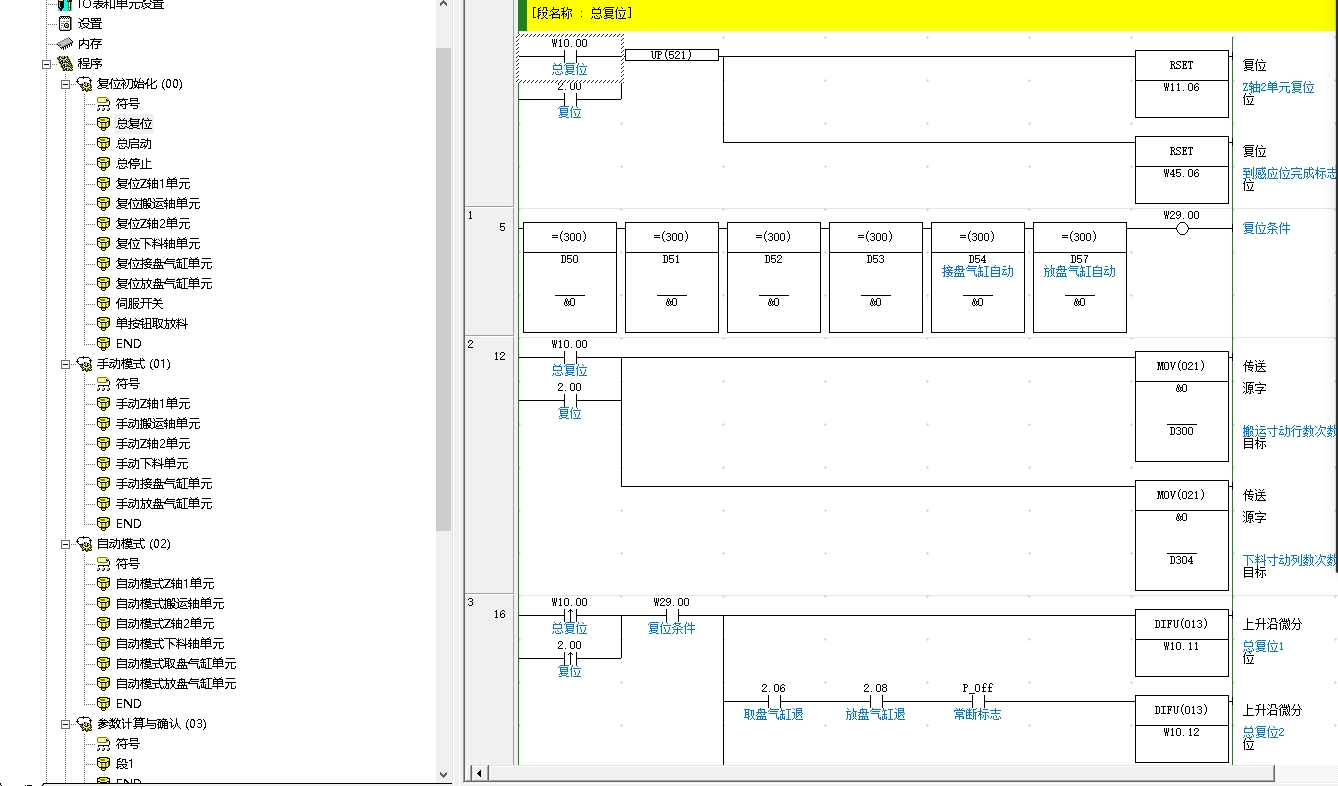
二、复位程序:
复位程序是保障系统正常运行的重要一环。在欧姆龙CP1H项目中,复位程序主要负责将所有轴回到初始位置,以确保系统在每次启动时始终处于可控状态。复位程序采用了逐个轴回零的策略,通过逐步减小位置误差,最终将轴回到准确的初始位置。
三、手动控制:
手动控制是程序编写的关键环节之一。在欧姆龙CP1H项目中,手动控制模块提供了灵活、直观的操作界面,方便用户随时对四个轴进行点动调节。通过手动控制模块,用户可以实时监测轴的位置、速度和加速度等参数,从而对运动进行精确控制。
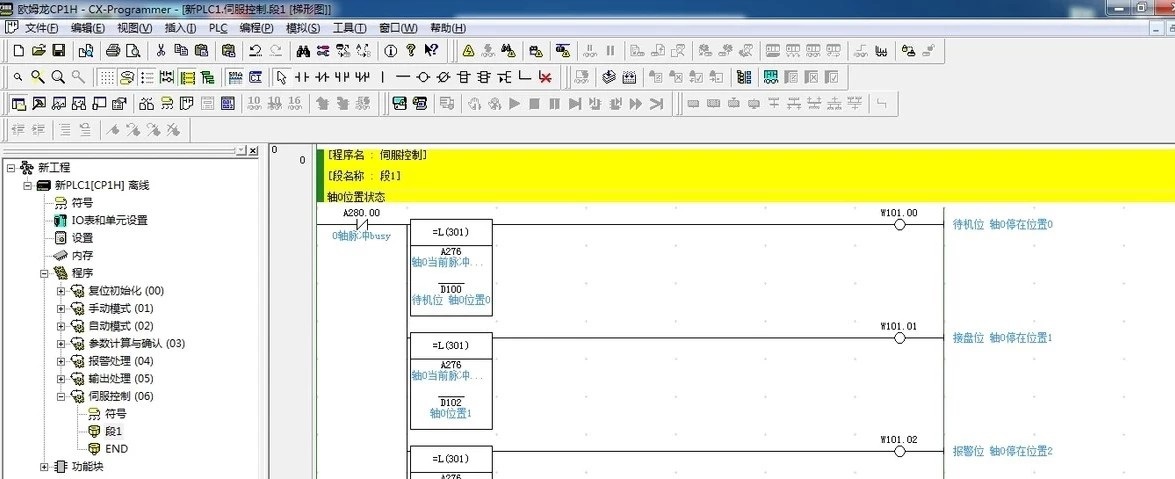
四、程序流程:
程序流程是欧姆龙CP1H项目的核心逻辑。在该项目中,程序流程采用了清晰明了的结构,通过状态机的方式实现轴的顺序控制。每个轴都有独立的状态机,根据不同的输入信号进行状态切换,从而实现轴之间的协调运动。同时,程序流程还通过灵活的条件判断和跳转指令,实现了复杂的运动流程控制。
五、总结:
欧姆龙CP1H项目程序的设计与实现涉及了多个关键模块,包括主控程序、复位程序、手动控制和程序流程。通过对这些模块的详细讲解,我们可以看出该程序的设计思路和技术实现。主控程序通过优化算法实现了轴的快速、准确控制;复位程序保障了系统的正常启动;手动控制模块提供了灵活的操作界面;程序流程通过状态机和条件判断实现了复杂的轴运动控制。整体而言,欧姆龙CP1H项目程序的设计精妙,功能强大,为工程师们提供了一种高效、可靠的轴控制解决方案。
更多关于欧姆龙CP1H项目程序的技术细节和实践经验,请关注我们的博客,并与我们进行交流与分享。在不断的探索与创新中,我们相信将会有更多精彩的技术文章和项目经验分享给大家。
相关的代码,程序地址如下:http://coupd.cn/656324779186.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









