






欧姆龙PLC项目程序NJ系列模切机技术分析
一、引言
随着制造业的不断发展,自动化和智能化已成为现代工业发展的重要趋势。在这个背景下,欧姆龙PLC项目程序NJ系列模切机作为一项高端复杂的实际应用技术,其在工业生产中的应用和价值不言而喻。本文将对这一项目进行深入的技术分析,旨在为读者提供一个全面、详细的技术解读。
二、项目概述
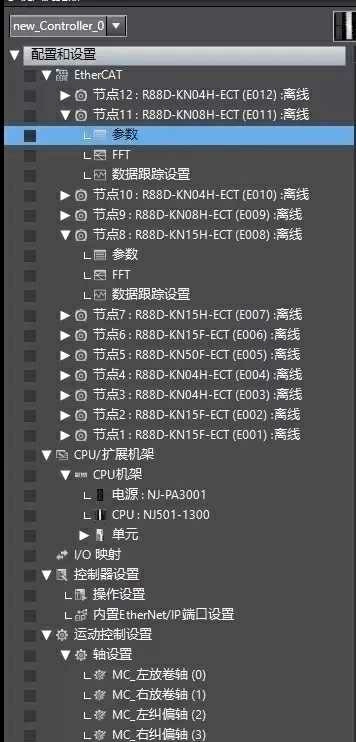
欧姆龙PLC项目程序NJ系列模切机主要用于控制12轴EtherCAT总线伺服运动,具备回零、点动、定位、速度控制等功能。在生产过程中,通过精确的控制和调节,实现对模切机的稳定运行和高效生产。同时,该项目还涉及到张力控制PID算法、隔膜自动纠偏控制等关键技术,以及同步运动控制、凸轮表追剪和裁切等功能。
三、硬件与设计
- 硬件设计
欧姆龙PLC项目程序NJ系列模切机采用先进的硬件设备,包括高性能的PLC控制器、伺服电机、传感器等。PLC控制器负责控制整个的运行,伺服电机负责实现精确的运动控制,传感器则用于实时监测设备的运行状态。整个设计结构清晰,布局合理,便于维护和检修。
- 设计
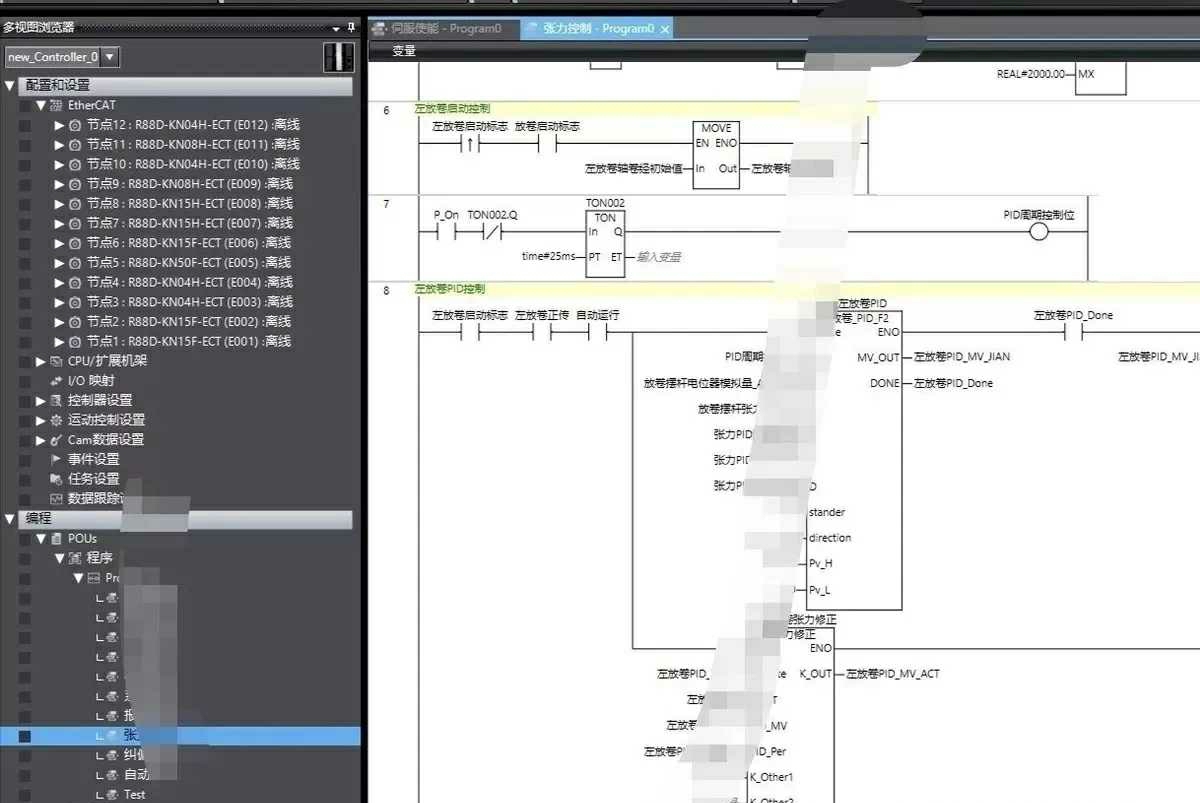
该项目的设计采用了结构化编程的方式,使用ST语言功能块进行编程。结构化编程方式使得代码易于理解和维护,同时也提高了程序的可靠性和稳定性。此外,该还具备实时数据处理能力,能够实时监测设备的运行状态和参数,为生产过程提供数据支持。
四、技术特点
- 12轴EtherCAT总线伺服运动控制
该项目采用了12轴EtherCAT总线伺服运动控制技术,实现了对设备的精确控制。EtherCAT总线是一种高精度、低延迟的通信协议,适用于高要求的工业控制。通过EtherCAT总线,可以实现对设备的实时监测和控制,提高了生产过程的稳定性和可靠性。
- 张力控制PID算法
该项目采用了张力控制PID算法,能够实现对模切机的张力控制。张力控制是模切机生产过程中的重要环节,过大的张力或过小的张力都会影响生产效率和产品质量。通过PID算法,可以实现对张力的精确控制,提高了生产效率和产品质量。
- 隔膜自动纠偏控制
该项目还采用了隔膜自动纠偏控制技术,实现了对设备的自动纠偏功能。在模切过程中,可能会出现隔膜偏离正常位置的情况,通过自动纠偏控制技术,可以实现对设备的自动调整和修正,提高了生产过程的稳定性和可靠性。
- 同步运动控制
该项目采用了同步运动控制技术,实现了凸轮表追剪和裁切的功能。在模切过程中,需要实现多个运动环节的同步运行和控制,通过同步运动控制技术,可以实现对各个运动环节的精确控制和调节。
五、结论
欧姆龙PLC项目程序NJ系列模切机是一项高端复杂的实际应用技术,其具有多种技术特点和应用价值。通过本文的技术分析,读者可以对该项目有更深入的了解和认识。同时,该项目也可以为读者提供学习和实践的机会,有助于提高读者的专业能力和技术水平。
欧姆龙PLC项目程序NJ系列模切机程序
1、12轴EtherCAT总线伺服运动控制,包含回零、点动、定位、速度控制。
2、张力控制PID算法,收放卷径计算,
3、隔膜自动纠偏控制,模拟量数据平均化处理,
4、同步运动控制,凸轮表追剪和裁切
5、结构化编程,ST语言功能块
6、项目结构规范,思路清晰,注释详细
7、通过该项目可以学习到PLC高端复杂的实际应用技术。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









