







本文转载至:http://buzzorange.com/techorange/2014/12/16/robot/
人體的手部運動到底有多精密呢? 看看機器人的研發過程就知道了,大部份的工程師都會坦承,模擬人類的手部動作,是研發機器人過程中最大的關卡。
通常人體的手,是由 29 個可彎曲的關節,以及千個以上遍布的末梢神經所構成,同時還有著敏銳的控制系統監督手部作業,才能準確辨別物體的冷熱以及表面狀況,甚至需要評估物體的硬度以計算需花多少力氣拿起物體。所以要造一隻機器手,絕非如此容易,連專家都坦承要複製人類的手簡直不可能,倒不如退一步想,利用現行所有的科技應用至機器人上頭,讓它們完成一些基礎的作業,別再強求過於繁複的科技。
而這十年來的科技演變,已經讓工業用機器手臂可以抓、握甚至移動物體,雖然無法靈活的活動,但已經是很大的進步了。畢竟在組裝線上,靈不靈活並不是一個很大的問題,重要的是機械式的動作可否達到高效率的狀態。
像現在許多機器人專家,都試著打造可以提升居住品質的機器人,比如說管家型機器人,可以打理家裡大小事,例如煮咖啡、拿藥等等家務。不過要做成這些事,就需要添加更多性能,例如打開一個罐子,就需要靈活的機器手,而要打造一個靈活的機器手,就需要多方面的測試以及計算。
- 人類關於機器人的夢想,最終必須回歸到一個問題:怎麼複製我們自己?
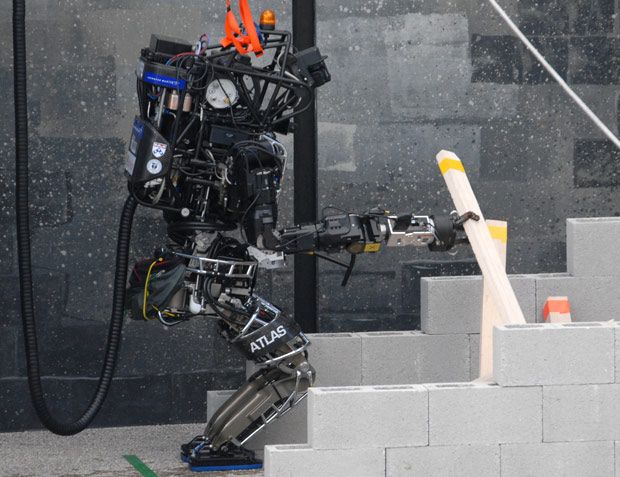
於是這由回歸到一開始的問題點,機器人要複製人類的手到底可不可行?原文作者和他的研究夥伴,在機器人領域待了十年之久,他們所研發出來的機器手 iHY,從外觀上看和人類的手並不相同,不過已經可以達成許多手部的指令動作。
事實上,從 1980 年起,機器人領域就開始蓬勃發展,最初的機器手,是 4 根手指加上可彎折的大拇指,外觀幾乎複製人類的手,當時造成很大的轟動,然而它的靈敏度極低,陸陸續續地出現不同的改良品,例如非驅動關節的機器手。為什麼叫非驅動關節呢?原因是此機器人所用的馬達比機器關節還少,並使用彈簧及機械連鎖連接較堅硬部分,例如手指的部分,此款機器手有辦法評估物體的大小跟形狀,代表他有辦法利用手指包覆物體,把物件握在手中。
而作者和他的團隊正是以此款機器手為雛型打造他們的機器手,當然他們還做了不少修改,他們將機器手設定為 3 指:2 根手指以及 1 個拇指,這 3 個物件同時由 5 個馬達驅動,所以整體來說降低了需要活動的零件。
同時呢,手掌底至指尖的部分也做了連結,此連結是由電子關節控制,以發揮手指的靈活度。而為了賦予機器手抓握的力量,他們在手掌底部安裝了電子腱,當馬達拉緊電子腱時,手指就會將物體抓緊。接著,他們將拇指部分裝上兩個獨立的關節,連接拇指上方跟下方至電子腱,同時由兩個不同的馬達驅動。
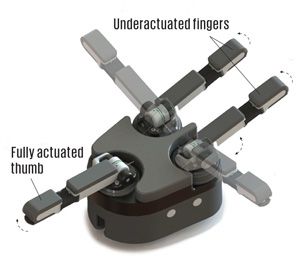
當 4 個馬達都在運轉控制手指時,最後 1 個馬達的用處則是加快手指的動作,以做出兩種不同的抓握方式,其中一是捏握法,另一是包握法。

同時,團隊還在機器手上裝了壓力感應器,以偵測物體的重量以及物體表面的柔軟性,方便機器手評估該以多少力量抓握物體。更甚至,此團隊還運用軟體,以電腦遠端操控機器手的活動,也將微型控制器嵌在機器手上,以便收集手指上壓力感應器的資料,並傳回位於手上的總控制處。
他們也利用磁鐵連接手指上的零件,這樣一來,一旦機器手無法承擔物體重量,他會從手指接縫部分斷裂,而非整個手掌碎裂。而手指的部分,團隊則採用市面常見的塑膠跟橡膠鑄造,不只耐用還可以節省成本。
最終,團隊希望能改良 iHY,使得它能完成更多商業用途,畢竟它的耐用性及低成本,作為雛型更可加速機器手的發展。














 1288
1288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









