






雷达型号:速腾聚创Helios-16p
雷点点云格式
sensor_msgs/PointCloud
std_msgs/Header header
uint32 seq //序列ID
time stamp //数据采集时间
string frame_id //坐标系id
geometry_msgs/Point32[] points //3维坐标
float32 x
float32 y
float32 z
sensor_msgs/ChannelFloat32[] channels //与每个point相关联的可选数据,比如强度值等
string name
float32[] values
sensor_msgs/PointCloud2
std_msgs/Header header
uint32 seq //序列ID
time stamp //时间戳
string frame_id //坐标系ID
uint32 height //2D点云的时候,存储高和宽
uint32 width //无序点云的时候,高度为1,宽度是点云的长度
sensor_msgs/PointField[] fields //每个点的详细信息
uint8 INT8=1
uint8 UINT8=2
uint8 INT16=3
uint8 UINT16=4
uint8 INT32=5
uint8 UINT32=6
uint8 FLOAT32=7
uint8 FLOAT64=8
string name //比如三维坐标,"x","y","z"
uint32 offset //应该指的是内存中的偏移量吧
uint8 datatype
uint32 count
bool is_bigendian //低地址存放高有效字节
uint32 point_step //点的长度
uint32 row_step //行的长度 以字节为单
uint8[] data //实际点云数据,数量=row_step * height;直接解析没有意义,要反解析
bool is_dense //没有无效点云时为true
可惜我这边没有具体的例子来说明每一项指标的具体含义。这里参考一下解析PointCloud2格式有举部分例子来说明。
sensor_msgs/LaserScan
Header header # timestamp in the header is the acquisition time of
# the first ray in the scan.
#
# in frame frame_id, angles are measured around
# the positive Z axis (counterclockwise, if Z is up)
# with zero angle being forward along the x axis
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds] - if your scanner
# is moving, this will be used in interpolating position
# of 3d points
float32 scan_time # time between scans [seconds]
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m] (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]. If your
# device does not provide intensities, please leave
# the array empty.这个消息格式就比较明朗,基本看名字就了解含义。
rotopic echo /scan --noarr(前提是下图)
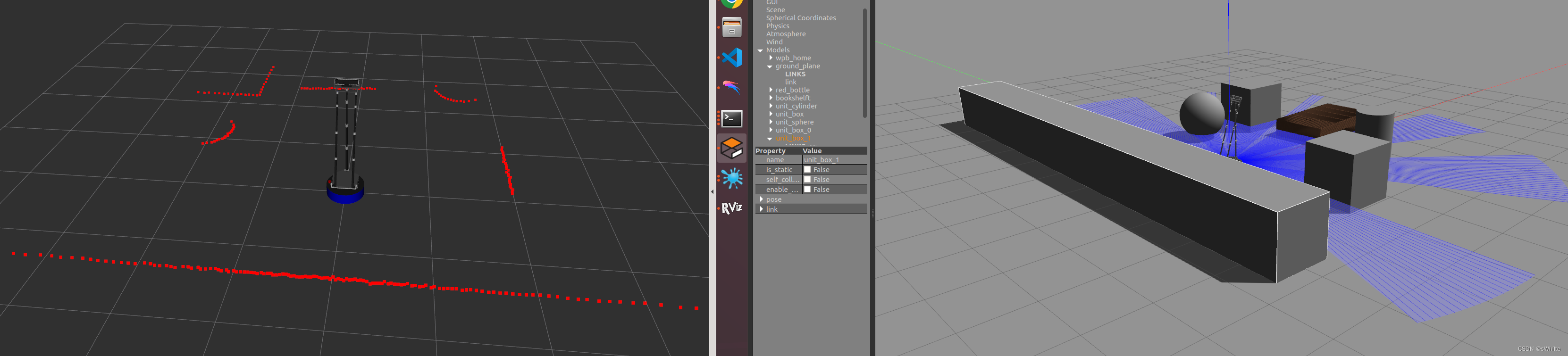
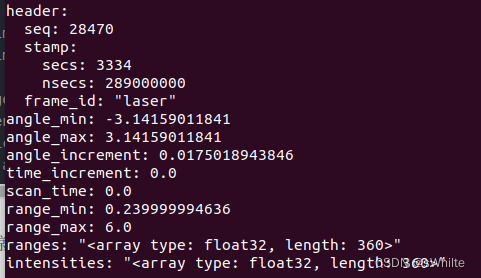
雷达所测数据不是所有点都有效,inf表示数值无穷大。
运行实际查看——尝试1:使用终端指令查看PointCloud2数据(保存为txt文件)
启动雷达节点
roslaunch rslidar_sdk start.launch
rqt_graph

另开一个终端
rostopic echo /rslidar_points > lidar.txt录了2秒钟左右,txt文件就达到了74.5MB,以下是部分截图
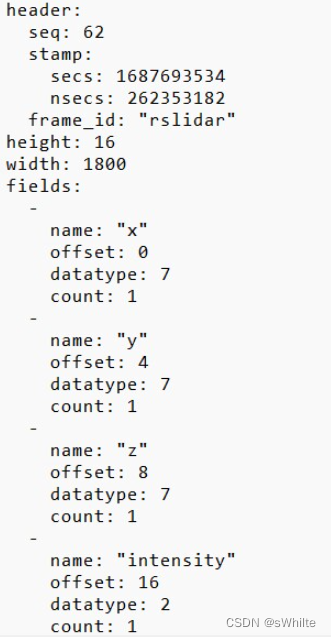
这里可以看到激光雷达数据是16*1800,16线激光雷达,每条线160°对应1800个点。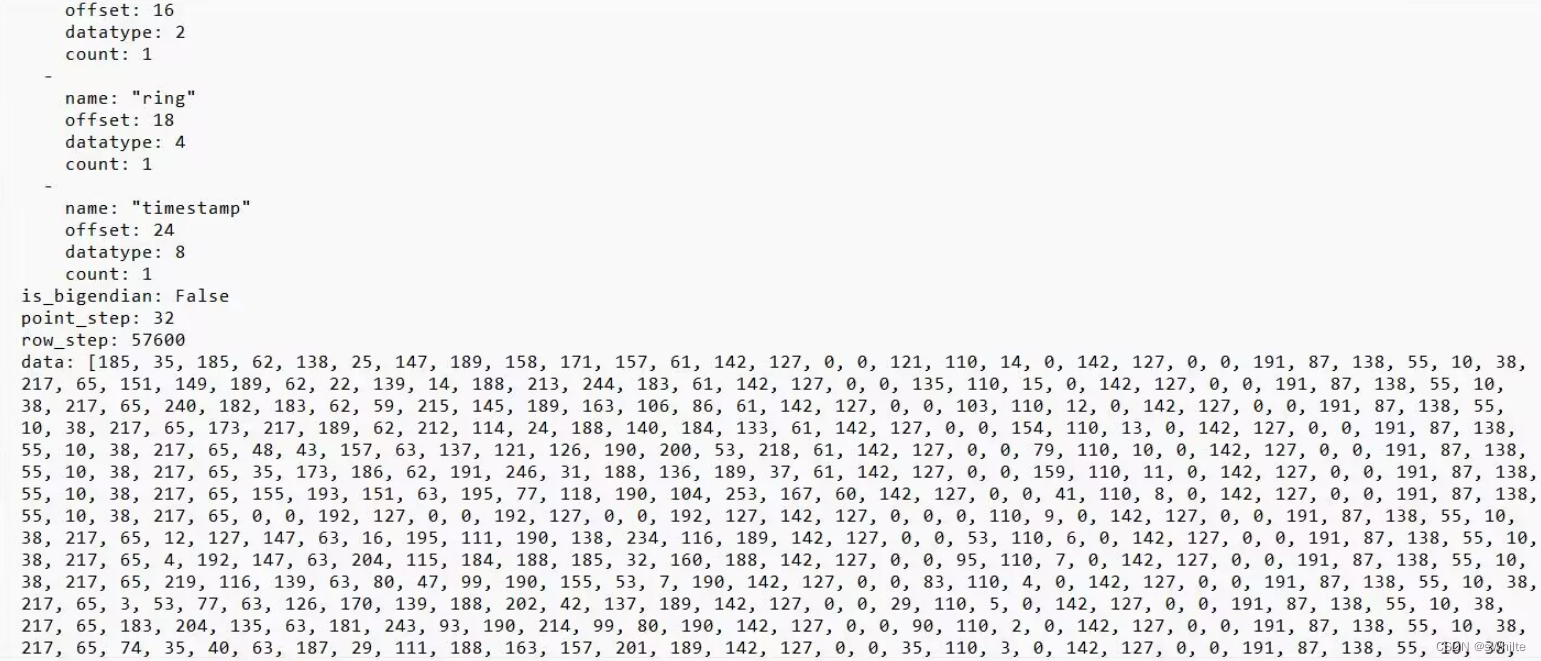
可以看到速腾聚创的驱动发布的雷达数据格式为PointCloud2格式,header包含序列ID:seq:62,时间戳,坐标系id:rslidar;每个点的name、offset、datatype、count、intensity等信息,数据部分暂时未读懂(果然没有意义)。
后面尝试自己敲代码读取data[]的数据,使用%f打印,结果全是0。
运行实际查看——尝试2:C++读取PointCloud的三维坐标
所以我参考网上代码自己写了一个C++程序来获取我所感兴趣的数据。
首先创建一个工作空间
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace
cd ..
catkin_make
然后创建功能包
cd catkin_ws/src
catkin_create_pkg lidar_pkg roscpp rospy sensor_msgs
cd ..
catkin_make以下是cpp代码,cpp文件名是lidar_node.cpp
#include<ros/ros.h>
#include<sensor_msgs/PointCloud.h>
#include<sensor_msgs/point_cloud_conversion.h>
#include<sensor_msgs/PointCloud2.h>
#include <queue>
#include <deque>
//#include <pcl/point_cloud.h>
ros::Publisher lidar_pub;
ros::Subscriber lidar_sub;
void LidarCallback(const sensor_msgs::PointCloud2ConstPtr& msg)
{
//cloudQueue.push_back(*msg);
//pcl::moveFromROSMsg(currentCloudMsg, *laserCloudIn);
sensor_msgs::PointCloud out_pointcloud;
sensor_msgs::convertPointCloud2ToPointCloud(*msg, out_pointcloud);
lidar_pub.publish(out_pointcloud);
for (int i=0; i<out_pointcloud.points.size(); i++)
{
//cout << out_pointcloud.points[i].x << ", " << out_pointcloud.points[i].y << ", " << out_pointcloud.points[i].z << endl;
ROS_INFO("No. %d",i);
ROS_INFO("X = %f",out_pointcloud.points[i].x);
ROS_INFO("Y = %f",out_pointcloud.points[i].y);
ROS_INFO("Z = %f",out_pointcloud.points[i].z);
}
}
int main(int argc,char *argv[])
{
setlocale(LC_ALL,"");
ROS_INFO("test");
std::deque<sensor_msgs::PointCloud2> cloudQueue;
sensor_msgs::PointCloud2 currentCloudMsg;
//pcl::PointCloud<PointXYZIRT>::Ptr laserCloudIn;
ros::init(argc,argv,"lidar_node");
ros::NodeHandle n;
lidar_sub = n.subscribe("/rslidar_points",10,&LidarCallback);
lidar_pub = n.advertise<sensor_msgs::PointCloud>("/rslidar_to_point",1);
ros::spin();
return 0;
}将以上cpp文件复制到catkin_ws/src/lidar_pkg/src下
接下来添加可执行文件以及链接库
在lidar_pkg下的CMakeLists.txt文件下合适位置添加如下内容
add_executable(lidar_node src/lidar_node.cpp)
target_link_libraries(lidar_node
${catkin_LIBRARIES}
)在终端回到catkin_ws目录下,source一下
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
catkin_make如果没问题的就准备差不多了
接下来就是运行了
新开一个终端
roslaunch rslidar_sdk start.launch
再从原来工作空间那个终端输入如下指令
rosrun lidar_pkg lidar_node
就可以看到打印的信息如下
再开一个终端
rostopic echo /rslidar_to_point > lidar.txt
这次保存的文件就小多了。包含信息如下,可以看到点的形式以三维坐标呈现,其实也就是sensor_msgs/PointCloud格式
但是也存在问题,我不知道每个点对应的ring,以及角度,而且我也不知道每个点的距离值。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









