







摘要:基于YOLOv7算法的高精度实时车载摄像头下车辆检测系统可用于日常生活中检测与定位车辆,此系统可完成对输入图片、视频、文件夹以及摄像头方式的目标检测与识别,同时本系统还支持检测结果可视化与导出。本系统采用YOLOv7目标检测算法来训练数据集,使用Pysdie6框架来搭建桌面页面系统,支持PT、ONNX等模型权重作为系统的预测模型加载。本系统实现的功能包括:模型权重的选择与初始化;检测置信度与后处理IOU阈值的调节;图像的导入、检测、检测结果的可视化与目标统计;视频的导入、检测、检测结果的可视化与目标统计;文件夹的图像批量导入、检测、检测结果的可视化与目标统计;设备摄像头的导入、检测、检测结果的可视化与目标统计;单张图像、视频、摄像的推理用时展示。本博文详细介绍系统的环境搭建过程、整体功能介绍与演示,用时也提供了完整的Python源码和使用教程,适合新入门的朋友参考同时支持二次开发,整个系统的完整代码以及资源文件请转至文末的下载链接来获取。
YOLOv7算法原理介绍
2022年7月YOLOv7被提出与发布,论文发表在2023的计算机视觉顶级会议CVPR上,在YOLOv3和YOLOv4的官网上均挂上了YOLOv7的链接和说明,这说明YOLOv7已得到了大佬的认可。官方版的YOLOv7相同体量下比YOLOv5精度更高,速度快120%(FPS),比 YOLOX 快180%(FPS),比 Dual-Swin-T 快1200%(FPS),比 ConvNext 快550%(FPS),比 SWIN-L快500%(FPS)。在5FPS到160FPS的范围内,无论是速度或是精度,YOLOv7都超过了目前已知的检测器,并且在GPU V100上进行测试,精度为56.8% AP的模型可达到30 FPS(batch=1)以上的检测速率,与此同时,这是目前唯一一款在如此高精度下仍能超过30FPS的检测器。
论文地址:https://arxiv.org/pdf/2207.02696.pdf
源码地址:https://github.com/WongKinYiu/yolov7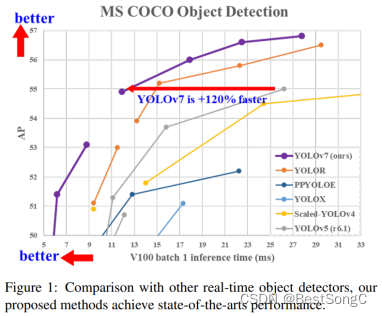
YOLOv7模型结构
YOLOv7模型的整体结构如下,与YOLOv5相似,整体可分为Input、Backbone、Neck、Head以及Prediction模块。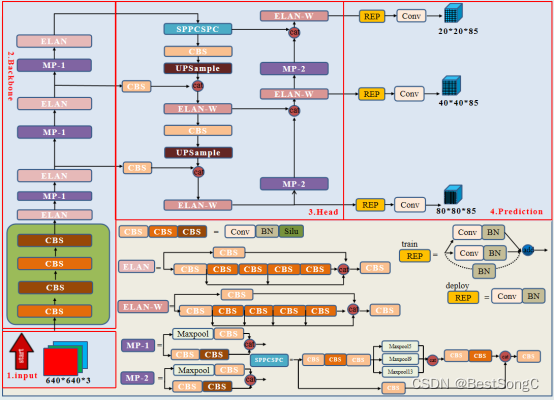
本节介绍YOLOv7相关模型里的新的模块:
(1)ReOrg:位于yolov7-w6.yaml文件中
这个模块其实是对输入的信息进行切片操作,与YOLOv2算法的PassThrough层以及YOLOv5(v5.0版本)的Focus操作类似,对输入图层尽可能保持原信息并进行下采样。(这部分代码具体位于models/common.py文件的48行)
(2)多路卷积模块
这部分主要还是大量复用1×1的point Conv和3×3的standard Conv,每个Conv 的输出不仅作为下一个Conv的输入,还会和所有其他的Conv输出进行Concat相连操作,类似于DenseNet里面的操作
(3)SPPCSPC模块
这是一种利用金字塔池化操作和CSP结构得到的模块,依旧包含了大量支路;总的输入会被分成三段进入不同的分支,最中间的分支其实就是金字塔池化操作,左侧分支类似于 depthwise Conv,但是请注意中间的3×3
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









