






MATLAB/Simulink搭建电动助力转向模型
视频操作,截图说明,简单易懂,一一对应。
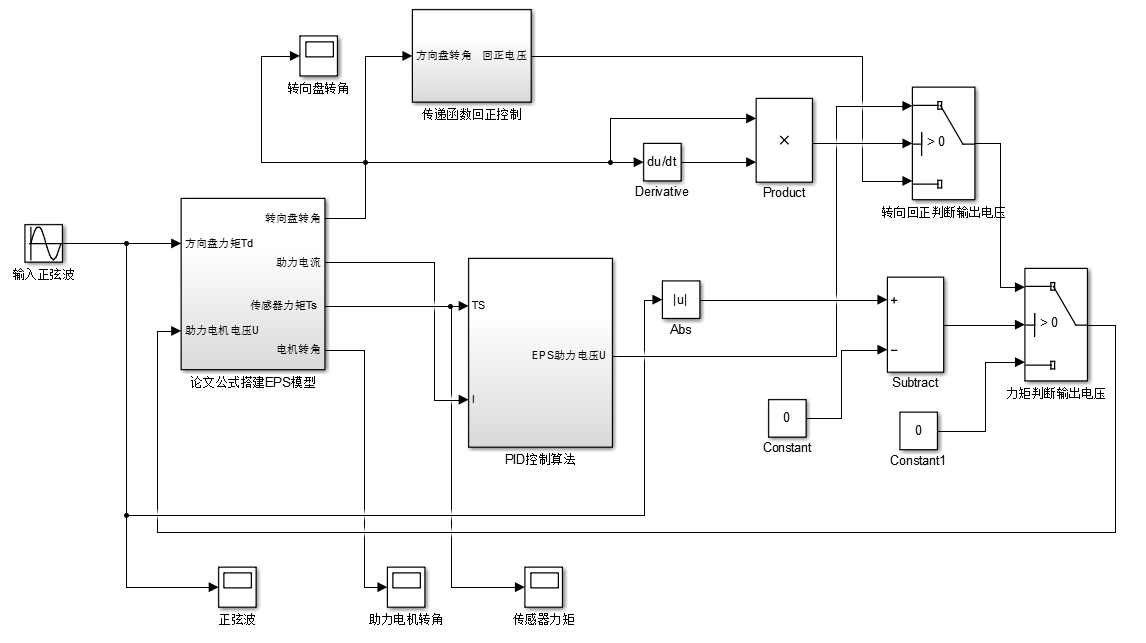
EPS模型,包括PID控制算法,传递函数回正控制,有完整的模型公式搭建过程,可直接仿真出图像,参数自己数据齐全,建模过程详细!
ID:4345660802702296
牡丹城幽默的草莓
MATLAB Simulink是一款强大的工具,用于建立和仿真复杂的系统模型。在本文中,我们将使用MATLAB Simulink来搭建一个电动助力转向模型,并通过视频操作和截图说明,以简单易懂的方式一一对应地展示。
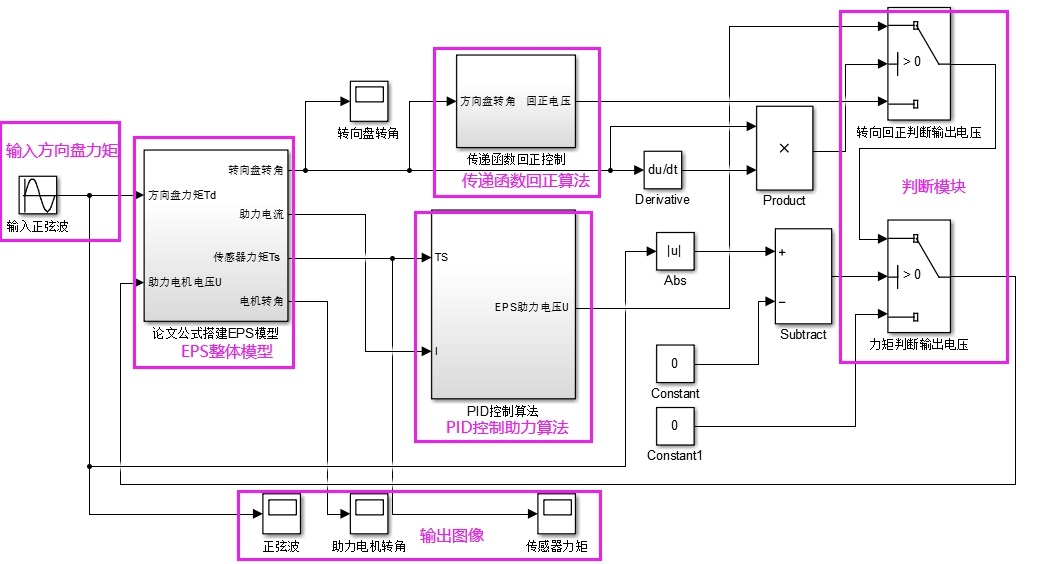
在电动助力转向系统中,常常应用EPS模型来实现精确的转向控制。EPS模型包括了PID控制算法和传递函数回正控制,这两种方法在实际应用中都具有良好的效果。在Simulink中,我们可以通过一系列的模块化构建,将这些控制算法整合到一个完整的EPS模型中。
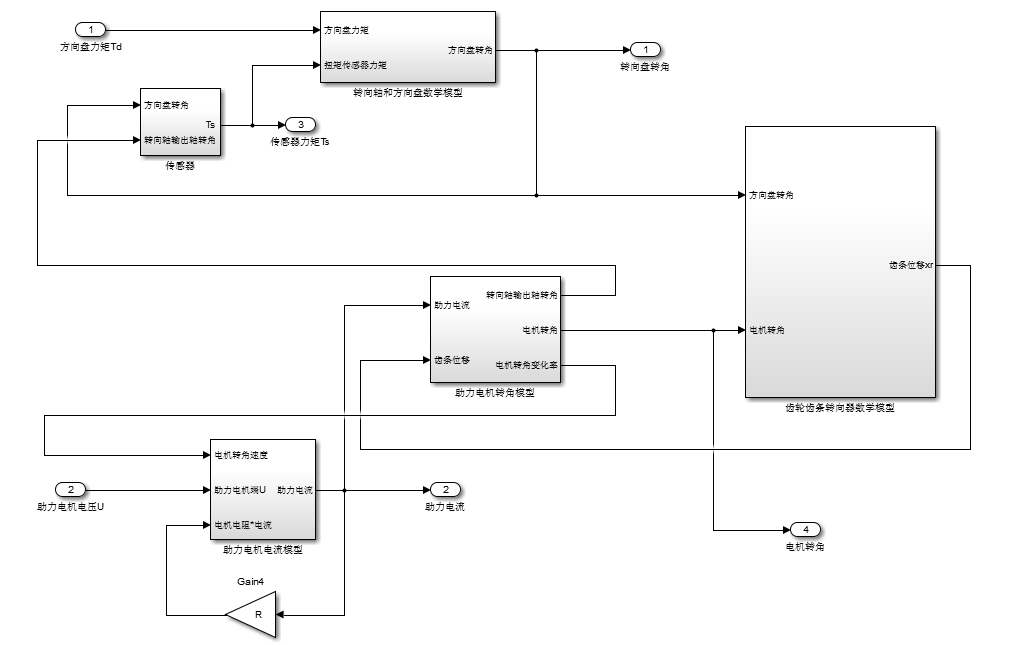
首先,我们需要明确EPS模型的结构和功能。EPS模型主要由以下几个部分组成:传感器模块、控制算法模块、执行器模块和仿真环境模块。传感器模块用于获取转向系统的实际状态信息,如转向角度和转向速度。控制算法模块会根据传感器模块的反馈信息,经过PID计算和传递函数回正控制,生成转向信号。执行器模块负责将转向信号转化为实际的转向力矩,作用于转向系统。仿真环境模块则提供了一个虚拟的环境,用于测试和验证EPS模型的性能。
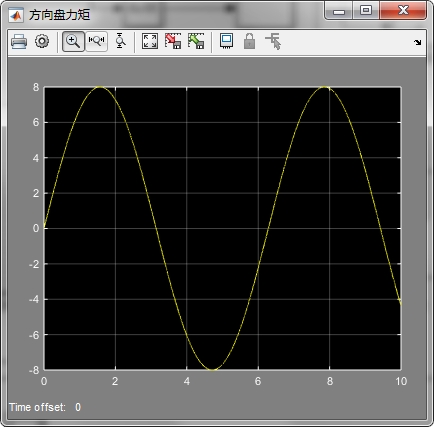
接下来,我们将一一介绍这些模块在Simulink中的实现过程。首先是传感器模块。我们可以使用Simulink中的传感器模块来模拟转向系统的实际状态信息。例如,可以使用角度传感器模块来获取转向角度,使用速度传感器模块来获取转向速度。这些传感器模块的输出将作为控制算法模块的输入。
控制算法模块是EPS模型中的核心部分。其中,PID控制算法是常用的一种方法。在Simulink中,我们可以使用PID Controller模块来实现PID算法。该模块提供了可调节的参数,如比例系数、积分时间和微分时间。通过调整这些参数,我们可以根据实际需求来优化控制算法的性能。
另外一种常用的控制算法是传递函数回正控制。在Simulink中,我们可以使用Transfer Function模块来实现传递函数回正控制。该模块可以根据预先给定的传递函数和输入信号,直接计算输出信号,并将其作为执行器模块的输入。
执行器模块负责将控制算法生成的信号转化为实际的转向力矩。在Simulink中,我们可以使用电动助力转向器模块来模拟执行器的功能。该模块提供了可调节的参数,如功率输出和力矩增益。通过调整这些参数,我们可以模拟不同类型的执行器,并优化转向系统的性能。
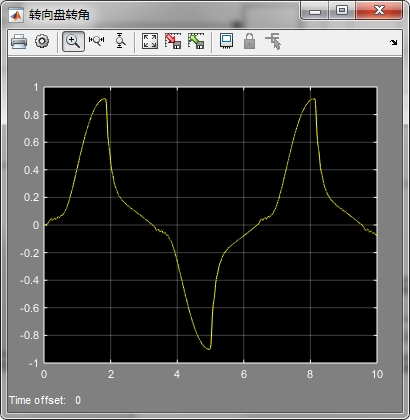
最后,仿真环境模块提供了一个虚拟的环境,用于测试和验证EPS模型的性能。在Simulink中,我们可以使用Scope模块来实现仿真环境模块。该模块可以监测和记录EPS模型的输出信号,并将其以图像的形式展示出来。通过观察仿真结果,我们可以评估EPS模型的控制效果,并进行参数调整。
通过以上步骤,我们已经完成了EPS模型的搭建过程。在Simulink中,我们可以直接进行仿真,并得到模拟结果的图像。同时,我们还可以根据实际需求,调整模型的参数和控制算法,以进一步优化转向系统的性能。
总之,通过MATLAB Simulink搭建电动助力转向模型,我们可以轻松地实现精确的转向控制。EPS模型的建立过程清晰易懂,一一对应地通过视频操作和截图进行展示。无论是PID控制算法还是传递函数回正控制,Simulink都提供了相应的模块,可以直接使用。通过仿真环境模块的支持,我们可以验证和优化EPS模型的性能。通过这种方式,我们可以快速开发出高效可靠的转向系统,提升车辆的操控性和安全性。
注意:本文仅为作者个人观点,不代表任何组织或机构的立场。
相关的代码,程序地址如下:http://nodep.cn/660802702296.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









